..
./7
.Г.
ел
С
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| Пневмопривод прерывистого вращательного движения | 1985 |
|
SU1307105A1 |
| Пневмогидравлический привод | 1983 |
|
SU1114821A2 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Газоструйная машина для очистки покрытий от снега и льда | 1976 |
|
SU604896A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2206691C1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Система управления гидравлическимпРЕССОМ | 1977 |
|
SU812602A2 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в роботах с цикловым программным управлением. Целью изобретения является снижение энергетических потерь. Способ реализуется путем автоматического управления вспомогательным приводом, содержащим цилиндр 4 со штоком 5, на котором установлена муфта 7. Золотники 9-12 и логический элемент 13 обеспечивают автоматическое подключение вспомогательного привода к ведомому звену 1 на участке его разгона. 2 с. и 3 з.п.ф-лы, 1 ил.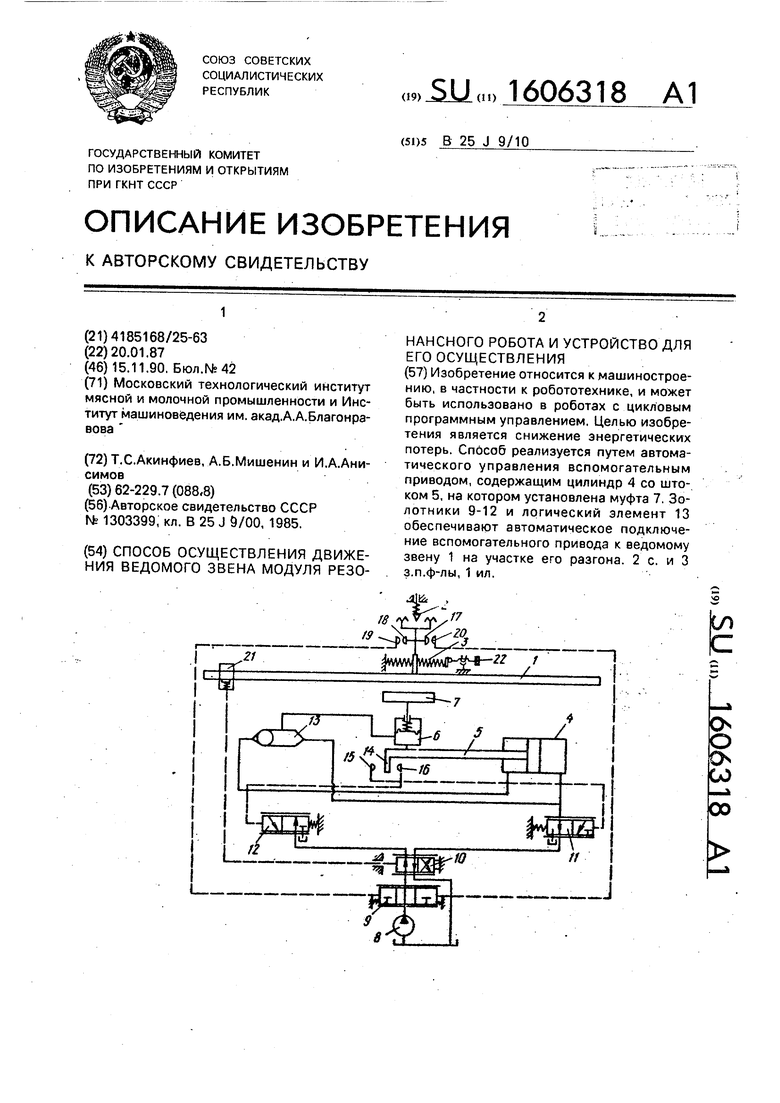
1Е1ГШ
- ./
/
1ГШ
-7
- ./
/
п
о о о
со
00
//
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в роботах с цикловым программным управлением.
Целью изобретения является снижение энергетических потерь.
На чертеже представлена схема устройства, реализующая предлагаемый способ.
Устройство содержит ведомое звено 1 модуля резонанснбго робота, фиксатор 2 положения и аккумулятор 3 (изображен условно). Вспомогательный привод включает пневмоцилиндр 4 со штоком 5, на котором закреплен корпус 6 управляемой муфты 7. Пневмосистема содержит компрессор 8 и управляющие золотники 9-12, а также логический элемент 13. На штоке 5 имеется упор 14, контактирующий с упорами 15 и 16 золотников 11 и 12, а на ведомом звене 1 имеются упоры 17 и 18, контактирующие с упорами 19 и 20 золотника 9.
На ведомом звене 1 установлен с фрикционным контактом элемент 21, связанный с золотником 10. Компрессор 8, золотники 9-12, логический элемент 13, цилиндр.4 и корпус 6 муфты 7 связаны пневмолиниями. Винт 22 предназначен для смещения положения равновесия ведомого звена 1 относительно фиксатора 2,
Способ осуществляется следующим образом.
На чертеже изображено устройство для реализации способа в нейтральном положении. При выводе ведомого звена 1 из этого положения каким-либо внешним воздействием, например влево по чертежу, аккумулятор 3 запасает энергию, а ведомое звено 1 фиксируется фиксатором 2. При этом упор 18 переключает золотник 9 в положение запирания пневмолинии. Далее включают компрессор 8. Устройство готово к работе. При расфиксации фиксатора 2 ведомое звено под действием усилия со стороны аккумулятора 3 перемещается вправо по чертежу. При этом упор 18 отходит от упора 19, и золотник 9 под действием собственных пружин занимает положение, соответствующее открытию напорной пневмолинии (чертеж). Одновременно элемент 21 вместе с ведомым звеном 1, перемещаясь вправо по чертежу, перемещает золотник 10 в положение до упора золотника 10 (чертеж). Далее элемент 21 проскальзывает. Золотник 12 под действием собственной пружины находится в положении, соответствующем чертежу, и соединяет тем самым штоковую полость пневмоцилиндра 4 и логический элемент 13 с компрессором 8. В результате этого рабочая среда попадает в корпус 6 муфты 7 и в штоковую полость пневмоцилиндра 4, за счет чего муфта 7 прижимается к ведомому звену 1 и вместе со штоком 5 перемещается вправо по чертежу, сообщая тем самым дополнительный импульс ведомому звену 1. В это время рабочая среда из поршневой полости пневмоцилиндра 4 поступает по пневмолиниям через золотник 11 и 10 в атмосферу. При контакте упора 14 с упором 16 золотник 12 переключается, сое0 диняя штоковую полость пневмоцилиндра 4 и логический элемент с атмосферой, запирая при зтом нагнетательную пневмолинию от компрессора 8. В результате этого муфта 7 отключается, а шток 5 останавливается.
5 Ведомое звено 1 продолжает двигаться вправо по чертежу до крайнего правого положения фиксирования. При этом упор 17 посредством упора 20 устанавливает золотник 9 в положение запирания. Ведомое зве0 но 1 неподвижно, и система подготовлена к движению в противоположную сторону (влево по чертежу).
При расфиксировании фиксатора 2 упор 17 отходит от упора 20 и золотник 9 анало5 гичным образом устанавливается в положение нагнетания. Элемент 21, двигаясь вместе с ведомым звеном 1 влево по чертежу, переключает золотник 10 в положение, соответствующее нагнетанию в поршневую
0 полость пневмоцилиндра 4 и в логический элемент 13 через золотник 11. Аналогичным образом включается муфта 7 и, перемещаясь со штоком 5, сообщает дополнительный импульс ведомому звену 1. При этом упор
5 14, отходя от упора 16, обеспечивает установку золотника 12 в положение, соответствующее чертежу, под действием) Собственных пружин золотника 12, что приводит к соединению штоковой полости
0 пневмоцилиндра 4 с атмосферой через золотники 12 и Ю. При контакте упора 14 с упором 15 золотник 11 переключается, соединяя поршневую полость пневмоцилиндра 4 и логический элемент 1.3 с атмосферой,
5 запирая при этом нагнетательную пневмолинию от KOMnpeccopia 8. В результате этого муфта 7 отключается, и шток 5 останавливается. Ведомое звено 1 продолжает двигаться влево по чертежу до крайнего левого
0 положения фиксирования. При этом упор 18 посредством упора 19 устанавливает золотник 9 в положение запирания. Ведомое звено 1 неподвижно, и система готова к движению в противоположную сторону
5 (вправо по чертежу). Далее процесс повторяется.
Для компенсации разности усилия на штоке 5 в противоположных направлениях (вследствие разности активных площадей поршня) положение равновесия ведомого
звена 1 относительно среднего положения между точками позиционирования смеща- .ется в сторону (вправо по чертежу) при настройке посредством вращения винта 22. Формула изобретения
0 поршневой привод, кинематически связанный с ведомым звеном, и систему автоматического управления вспомогательным приводом, отличающееся тем, что, с целью снижения энергетических потерь.
5 кинематическая связь вспомогательного поршневого привода с ведомым звеном выполнена в виде управляемой фрикционной муфты, корпус которой закреплен на штоке вспомогательного поршневого при0 вода, выходное ее звено расположено с возможностью контакта с ведомым звеном, а система автоматического управления снабжена дополнительно средством автоматического включения и выключения
5 фрикционной муфты, включающим датчики положения штока, управляющие золотники и логический элемент, причем управляющие золотники связаны линиями с полостями вспомогательного поршневого
0 привода и с логическим элементом.
| Привод робота | 1985 |
|
SU1303399A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
