Изобретение относится к машиностроению, в частности к роботам и манипуляторам, применяемым для автоматизации различных производственных процессов, таких как загрузка и разгрузка технологического оборудования, сборка, покраска.
Цель изобретения - снижение энергозатрат и повышение производительности работы путем обеспечения работы привода в резонансном режиме.
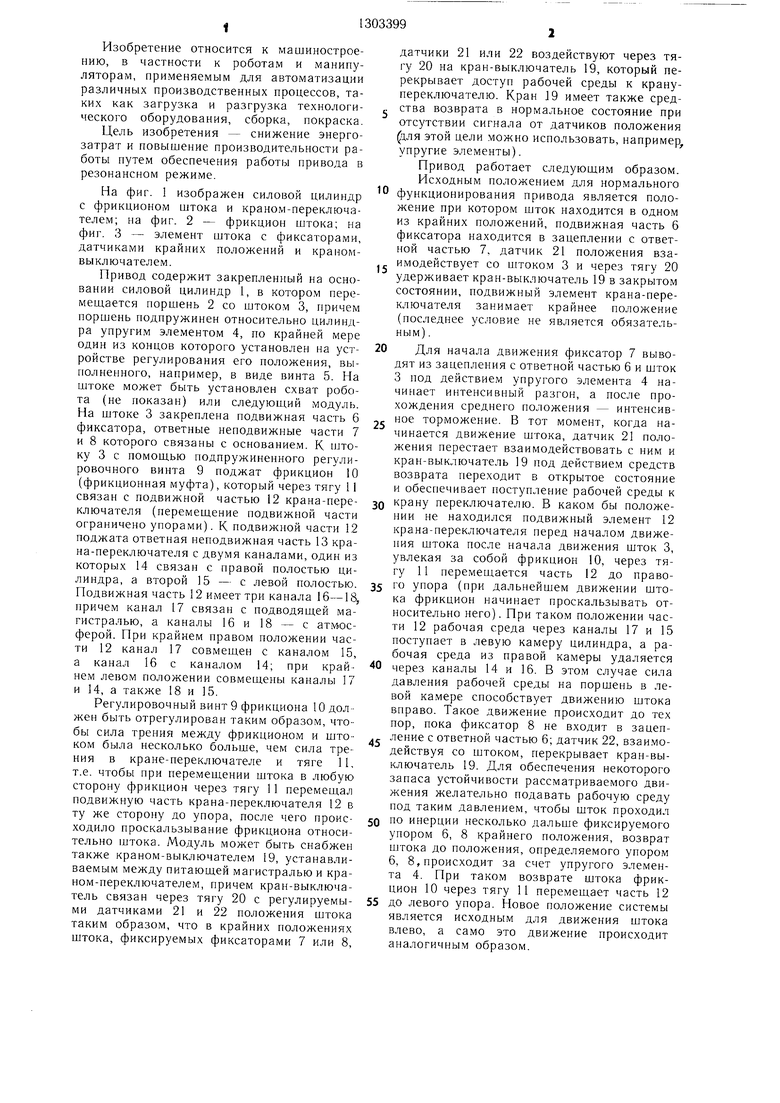
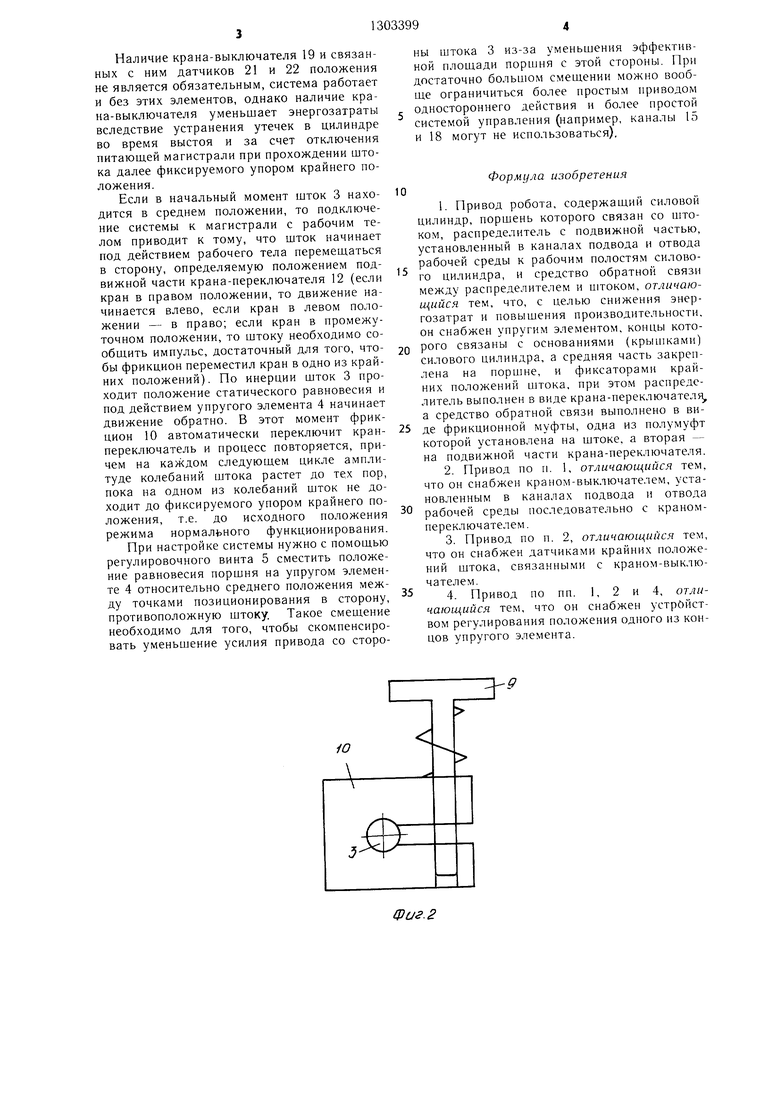
На фиг. 1 изображен силовой цилиндр с фрикционом штока и краном-переключателем; на фиг. 2 - фрикцион штока; на фиг. 3 - элемент штока с фиксаторами, датчиками крайних положений и краном- выключателем.
Привод содержит закрепленный на основании силовой цилиндр 1, Б котором перемещается поршень 2 со штоком 3, причем поршень подпружинен относительно цилиндра упругим элементом 4, по крайней мере один из концов которого установлен на устройстве регулирования его положения, выполненного, например, в виде винта 5. На штоке может быть установлен схват робота (не показан) или следуюа1ий модуль. На штоке 3 закреплена подвижная часть 6 фиксатора, ответные неподвижные части 7 и 8 которого связаны с основанием. К HJTO- ку 3 с помощью подпружиненного регулировочного винта 9 поджат фрикцион 10 (фрикционная муфта), который через тягу 11 связан с подвижной частью 12 крана-переключателя (перемещение подвижной части ограничено упорами). К подвижной части 12 поджата ответная неподвижная часть 13 крана-переключателя с двумя каналами, один из которых 14 связан с правой полостью цилиндра, а второй 15 - с левой полостью. Нодвижная часть 12 имеет три канала 16-18, нричем канал 17 связан с подводящей магистралью, а каналы 16 и 18 - с атмосферой. При крайнем правом положении части 12 канал 17 совмещен с каналом 15, а канал 16 с каналом 14; при крайнем левом положении совмеше}1Ы каналы 17 и 14, а также 18 и 15.
Регулировочный винт 9 фрикциона 10 должен быть отрегулирован таким образом, чтобы сила трения между фрикционом и щто- ком была несколько больше, чем сила трения в кране-переключателе и тяге II, т.е. чтобы при перемещении щтока в любую сторону фрикцион через тягу 11 перемещал подвижную часть крана-переключателя 12 в ту же сторону до упора, после чего происходило проскальзывание фрикциона относительно штока. Модуль может быть снабжен также краном-выключателем 19, устанавливаемым между питающей магистралью и краном-переключателем, причем кран-выключатель связан через тягу 20 с регулируемыми датчиками 21 и 22 положения щтока таким образом, что в крайних положениях щтока, фиксируемых фиксаторами 7 или 8,
датчики 21 или 22 воздействуют через тягу 20 на кран-выключатель 19, который перекрывает доступ рабочей среды к крану- переключателю. Кран J9 имеет также средства возврата в нормальное состояние при отсутствии сигнала от датчиков положения аля этой цели можно использовать, например, упругие элементы).
Привод работает следующим образом.
Исходным положением для нормального функционирования привода является положение при котором шток находится в одном из крайних положений, подвижная часть 6 фиксатора находится в зацеплении с ответной частью 7, датчик 21 положения взаимодействует со штоком 3 и через тягу 20 удерживает кран-выключатель 19 в закрытом состоянии, подвижный элемент крана-переключателя занимает крайнее положение (последнее условие не является обязательным).
Для начала движения фиксатор 7 выводят из зацепления с ответной частью 6 и щток 3 под действием упругого элемента 4 начинает интенсивный разгон, а после прохождения среднего положения - интенсивное торможение. В тот момент, когда начинается движение штока, датчик 21 положения перестает взаимодействовать с ним и кран-выключатель 19 под действием средств возврата переходит в открытое состояние и обеспечивает поступление рабочей среды к крану переключателю. В каком бы положении не находился подвижный элемент 12 крана-переключателя перед началом движения щтока после начала движения щток 3, увлекая за собой фрикцион 10, через тягу 11 перемещается часть 12 до правого упора (при дальнейшем движении штока фрикцион начинает проскальзывать относительно него). При таком положении части 12 рабочая среда через каналь 17 и 15 поступает в левую камеру цилиндра, а рабочая среда из правой камеры удаляется через каналы 14 и 16. В этом случае сила давления рабочей среды на поршень в левой камере способствует движению штока вправо. Такое движение происходит до тех пор, пока фиксатор 8 не входит в зацепление с ответной частью 6; датчик 22, взаи.мо- действуя со штоком, перекрывает кран-выключатель 19. Для обеспечения некоторого запаса устойчивости рассматриваемого движения желательно подавать рабочую среду под таким давлением, чтобы щток проходил по инерции несколько дальще фиксируемого упором 6, 8 крайнего положения, возврат штока до положения, определяемого упоро.м 6, 8, происходит за счет упругого элемента 4. При таком возврате штока фрикцион 10 через тягу 11 перемещает часть 12 до левого упора. Новое положение системы является исходным для движения щтока влево, а само это движение происходит аналогичным образом.
Наличие крана-выключателя 19 и связанных с ним датчиков 21 и 22 положения не является обязательным, система работает и без этих элементов, однако наличие крана-выключателя уменьшает энергозатраты вследствие устранения утечек в цилиндре во время выстоя и за счет отключения питающей магистрали при прохождении штока далее фиксируемого упором крайнего положения.
Если в начальный момент шток 3 находится в среднем положении, то подключение системы к магистрали с рабочим телом приводит к тому, что шток начинает под действием рабочего тела перемешаться в сторону, определяемую положением подвижной части крана-переключателя 12 (если кран в правом положении, то движение начинается влево, если кран в левом положении - в право; если кран в промежуточном положении, то штоку необходимо со- обш,ить импульс, достаточный для того, чтобы фрикцион переместил кран в одно из крайних положений). По инерции шток 3 проходит положение статического равновесия и под действием упругого элемента 4 начинает движение обратно. В этот момент фрикцион 10 автоматически переключит кран- переключатель и процесс повторяется, причем на каждом следуюшем цикле амплитуде колебаний штока растет до тех пор, пока на одном из колебаний шток не доходит до фиксируемого упором крайнего положения, т.е. до исходного положения режима нормального функционирования.
При настройке системы нужно с помошью регулировочного винта 5 сместить положение равновесия поршня на упругом элементе 4 относительно среднего положения между точками позиционирования в сторону, противоположную штоку. Такое смешение необходимо для того, чтобы скомпенсировать уменьшение усилия привода со сторо/О
ны штока 3 из-за уменьшения эффективной площади поршня с этой стороны. При достаточно большом смешении можно вооб- ше ограничиться более простым приводом одностороннего действия и более простой системой управления (например, каналы 15 и 18 могут не использоваться).
10
Формула изобретения
5
1.Привод робота, содержащий силовой цилиндр, поршень которого связан со HITO- ком, распределитель с подвижной частью, установленный в каналах подвода и отвода рабочей среды к рабочим полостям силового цилиндра, и средство обратной связи между распределителем и штоком, отличающийся тем, что, с целью снижения энергозатрат и повышения производительности, он снабжен упругим элементом, концы котоQ рого связаны с основаниями (крьцпками) силового цилиндра, а средняя часть закреплена на поршне, и фиксаторами крайних положений штока, при этом распределитель выполнен в виде крана-переключателя, а средство обратной связи выполнено в ви5 де фрикционной муфты, одна из полумуфт которой установлена на штоке, а вторая - на подвижной части крана-переключателя.
2.Привод по п. 1, отличающийся тем, что он снабжен краном-выключателем, установленным в каналах подвода и отвода рабочей среды последовательно с краном- переключателем.
3.Привод по п. 2, отличающийся тем, что он снабжен датчиками крайних положений штока, связанными с краном-выключателем.
4.Привод по пп. 1, 2 и 4, отличающийся тем, что он снабжен устройством регулирования положения одного из концов упругого элемента.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| УСТРОЙСТВО ДЛЯ ОТВИНЧИВАНИЯ БОЛТОВ И СНЯТИЯ КРЕПИТЕЛЬНЫХ КРЫШЕК РОЛИКОВЫХ БУКС | 1972 |
|
SU428966A1 |
| Способ осуществления движения ведомого звена модуля резонансного робота и устройство для его осуществления | 1987 |
|
SU1606318A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| Автооператор к сферошлифовальному станку | 1955 |
|
SU112457A1 |
| Станок для заплетки канатов | 1976 |
|
SU614144A1 |
| Перепускной кран | 1982 |
|
SU1092289A1 |
| УСТРОЙСТВО для БУРЕНИЯ ШПУРОВ | 1970 |
|
SU261322A1 |
Изобретение относится к машиностроению, в частности к роботам и мани- нуляторам, нрименяемым для автоматизации различных производственных процессов, таких как загрузка и разгрузка технологического оборудования,сборка, покраска. Целью изобретения является снижение энергозатрат и повышение производительности робота за счет работы привода в резонансном режиме. Исходным положением для функционирования привода является положение, при котором шток 3 находится в одном из крайних положений, подвижная часть фиксатора находится в зацеплении с ответной его J // неподвижной частью, датчик положения взаимодействует со штоком 3 и через тягу удерживает кран-выключате. 1ь в закрытом состоянии. Подвижная часть 12 крана-переключателя занимает крайнее положение. Для па- чала движения подвижную часть ф1 ксато- ра выводят из зацепления с его неподвижной частью, и Н1ТОК 3 под действием упругого элемента 4 начинает интенсивный разгон, а после прохождения среднего положения - интенсивное торможение. При этом шток 3, увлекая за собой фрикцион 10 (фрикционную муфту), через тягу 11 переместит подвижную часть 12 крана-переключателя, например, до правого упора, и рабочая среда через каналы 17, 15 будет поступать в левую камеру силового цилиндра 1, а рабочая среда из правой камеры будет удаляться через каналы 14 и 16. В этом случае сила давления рабочей среды будет способствовать движению штока 3. При иод- ходе гнтока к крайнему положению перемешается часть 12 до левого упора, и повое положение будет исходпым для движения штока влево. 3 з.п. ф-лы, 3 ил. SS (Л оо о со со CD :о (риг. 1 11
Фиг. 2
0
Ч/
Сос1авитель А. Косеева
Редактор Л. ПчолинскаяТехред И. ВересКорректор А. Обручар
Заказ 1257/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-Зо, Рау1иская наб., д. 4/5 Производственно-нолиграфическое Г1)едприятие, г. Ужгород, ул. Проектная, 4
| Костюк В | |||
| И | |||
| и др | |||
| Промышленные роботы | |||
| - Киев; Вита школа, 1985, с | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
