Изобретение относится к устройствам механизации погрузочно-разгрузочных работ при перевозке автомобильным транспортом штучных грузов, например, контейнеров, hoflflOHOB и пр.
Цель изобретения - расширение функциональных возможностей.
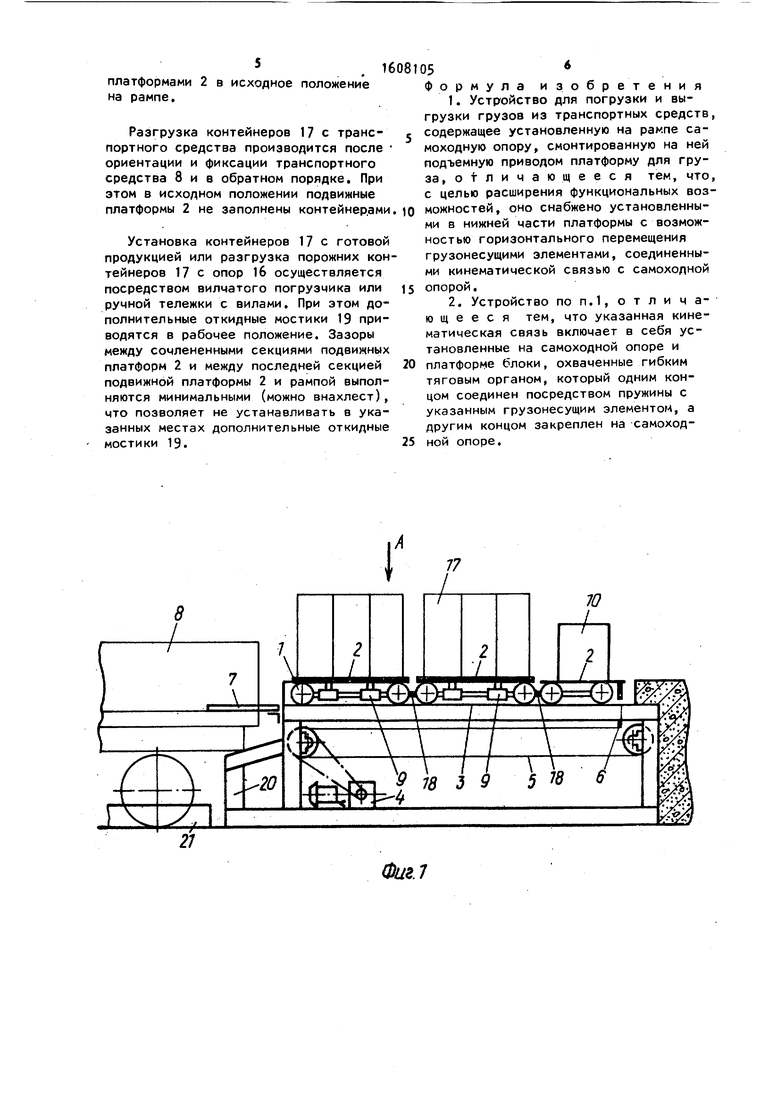
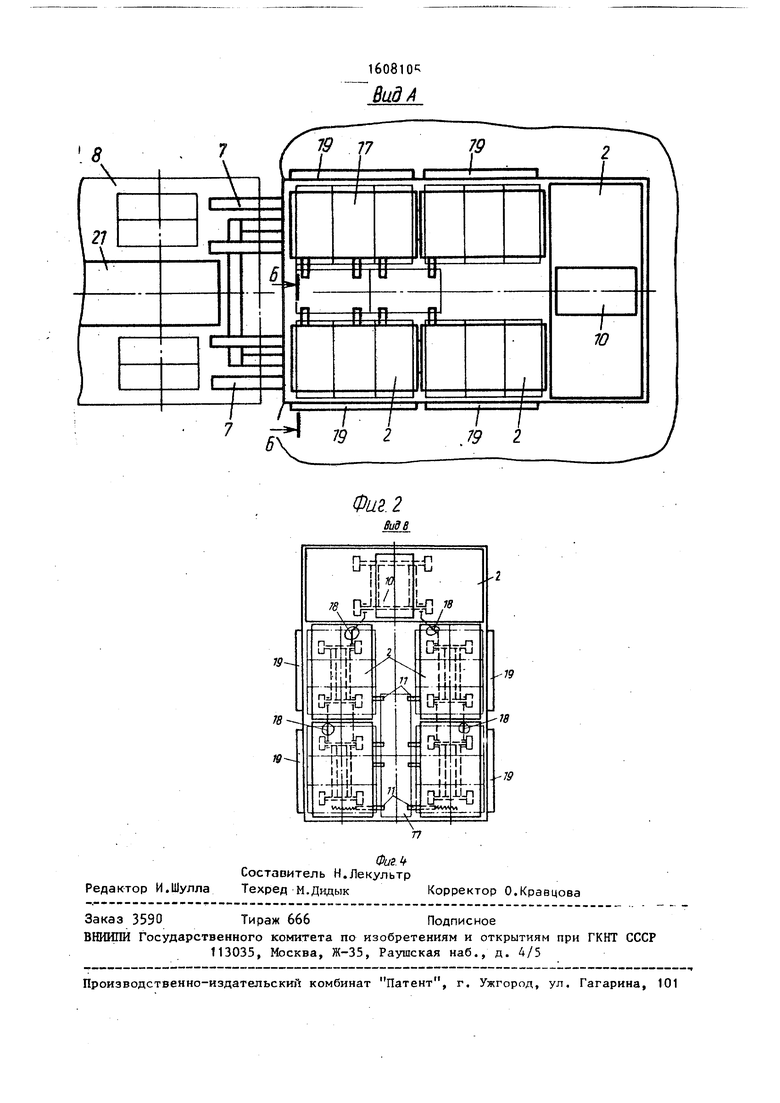
На фиг, 1 изображено устройство, разрез; на фиг. 2 - вид А на фиг. 1; на Фиг. 3 - сечение Б-Б на фиг. 2; на фиг. - вид В на фиг, 3.
Устройство для погрузки и выгрузов из транспортных средств содержит установленные на рампе самоходные опоры 1, на каждой из которых установлена подъемная платформа 2. Самоходные опоры перемещаются на направляющих 3 посредством привода , связанного с цепной передачей 5 на которой закреплен кронштейн -6 для взаимодействия с самоходной опорой. На рампе смонтирован переходный мостик 7 для взаимодейст- ВИЯ с транспортным средством 8. ПриВключается гидростанция 10 посредством гидроцилиндров 9, начинается подъем подъемных платформ 2 и одновременно канат И, запасованный в блоках, образующих тройной полиспаст, выдвигает подпружиненные грузонесу- щие элементы 11, которые захватывают и отрывают от неподвижных опор 1б контейнеры 17, стоящие в среднем ряду и
-)СICKinC-JJOt1/ - - - г- - п -
вод подъемной платформы включает гид- 25 относительно других контей.
30
40
роцилиндр 9, связанный с гидростанцией 10.
В исходном положении рабочие поверхности подъемных платформ и рампы совпадают. На каждой платформе 2 установлены грузонесущие элементы 11 , связанные посредством пружин 12 с запасованным в блоках 13 гибким тяговым органом k, другой конец которого закреплен на кронштейне 15 самоходной 5 опоры 1. На рампе вдоль платформ 2 смонтированы неподвижные опоры 1б для установки контейнера с грузом с зазором относительно платформы для прохождения вил погрузчика или ручной тележки при установке контейнера 17 на опоры 1б. Самоходные опоры 1 выполнены из подвижно сочлененных посредством шарнирных звеньев 18 секций для облегчения прохода их через переходные мостики 7 на транспортное средство 8. На рампе смонтированы откидные дополнительные переходные мостики 19 для прохождения погрузчика и ручной тележки на подвижную платформу д 2 и установки контейнеров 17 на неподвижные опоры 16. Рампа в передней части имеет опорную стойку 20 для Р азгрузки рессор транспортного средства в процессе погрузки и направляющие элементы 21 для ориентации транспортного средства
Устройство работает следующим образом.
45
55
неров на 90 в плане, а плафтормы поднимают установленные над ними контейнеры. После полного подъема всех контейнеров 17 подвижными платформами отключается гидростанция 10 и включается привод , который посредством цепной передачи 5 и кронштейна 6 перемещает опоры 1 вместе с контейнерами 17 на борт транспортного средства 8 по направляющим 3 и переходному мостику 7. После того, как все контейнеры 17 вместе с подвижными платформами 2 окажутся на борту транспортного средства, отключается привод и включаются на реверс гидроцилиндры 9 посредством гидростанции 10.
Подвижные платформы 2 вместе с выдвижными упорами 11 опускаются, при этом контейнеры 17 оказываются на борту транспортного средства 8. При движении вниз подвижной платформы 2 вместе с выдвижными упорами 11 последние, удерживаемые контейнерами ;7 в среднем ряду, не могут переместиться, при этом канат 1 на обводных блоках провисает. После того, как контейнеры 17 окажутся на борту, выдвижные упоры 11 под воздействием пружин возвращаются в исходное поло жение. Отключается гидростанция 10, включается на реверс привод k, который возвращает опоры 1 с подвижными
0
5
50 105
Транспортное средство 8 наезжает задним бортом на рампу и ориентируется направляющими элементами 21, а при наезде на опорную стойку 20 разгружает рессоры от нагрузок, производится окончательное выравнивание рабочей поверхности борта транспортного средства с рабочей поверхностью направляющих 3, по которым перемещаются самоходные опоры 1. При этом переходной мостик 7 оказывается на рабочей поверхности борта транспортного средства 8.
Включается гидростанция 10 посредством гидроцилиндров 9, начинается подъем подъемных платформ 2 и одновременно канат И, запасованный в блоках, образующих тройной полиспаст, выдвигает подпружиненные грузонесу- щие элементы 11, которые захватывают и отрывают от неподвижных опор 1б контейнеры 17, стоящие в среднем ряду и
ICKinC-JJOt1/ - - - г- - п -
относительно других контей относительно других контей
неров на 90 в плане, а плафтормы поднимают установленные над ними контейнеры. После полного подъема всех контейнеров 17 подвижными платформами отключается гидростанция 10 и включается привод , который посредством цепной передачи 5 и кронштейна 6 перемещает опоры 1 вместе с контейнерами 17 на борт транспортного средства 8 по направляющим 3 и переходному мостику 7. После того, как все контейнеры 17 вместе с подвижными платформами 2 окажутся на борту транспортного средства, отключается привод и включаются на реверс гидроцилиндры 9 посредством гидростанции 10.
Подвижные платформы 2 вместе с выдвижными упорами 11 опускаются, при этом контейнеры 17 оказываются на борту транспортного средства 8. При движении вниз подвижной платформы 2 вместе с выдвижными упорами 11 последние, удерживаемые контейнерами ;7 в среднем ряду, не могут переместиться, при этом канат 1 на обводных блоках провисает. После того, как контейнеры 17 окажутся на борту, выдвижные упоры 11 под воздействием пружин возвращаются в исходное поло жение. Отключается гидростанция 10, включается на реверс привод k, который возвращает опоры 1 с подвижными
платформами на рампе.
2 в исходное положение
Разгрузка контейнеров 17 с транспортного средства производится после ориентации и фиксации транспортного средства 8 и в обратном порядке. При этом в исходном положении подвижные платформы 2 не заполнены контейнер.ами
Установка контейнеров 17 с готовой продукцией или разгрузка порожних контейнеров 17 с опор 1б осуществляется посредством вилчатого погрузчика или ручной тележки с вилами. При этом дополнительные откидные мостики 19 приводятся в рабочее положение. Зазоры между сочлененными секциями подвижных платформ 2 и между последней секцией подвижной платформы 2 и рампой выполняются минимальными (можно внахлест), что позволяет не устанавливать в указанных местах дополнительные откидные мостики 19.
08105
Формула изобретения
1.Устройство для погрузки и выгрузки грузов из транспортных средств, содержащее установленную на рампе самоходную опору, смонтированную на ней подъемную приводом платформу для груза, otличaющeecя тем, что, с целью расширения функциональных воз10 можностей, оно снабжено установленными в нижней части платформы с возможностью горизонтального перемещения грузонесущими элементами, соединенными кинематической связью с самоходной
15 опорой.
2.Устройство по П.1, о т л и чающееся тем, что указанная кинематическая связь включает в себя установленные на самоходной опоре и
20 платформе блоки, охваченные гибким тяговым органом, который одним концом соединен посредством пружины с указанным грузонесущим элементом, а другим концом закреплен на самоход25 ной опоре.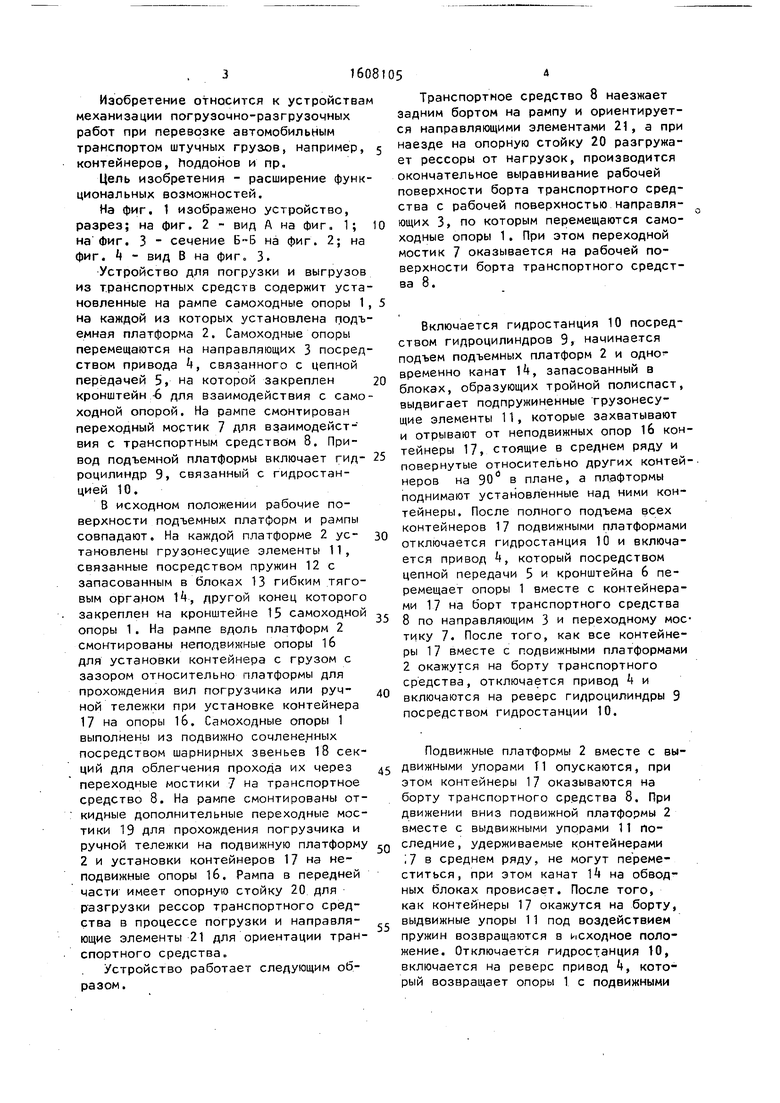
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 1991 |
|
RU2028220C1 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| СИСТЕМА ДЛЯ ПОДГОТОВКИ КОНТЕЙНЕРОВ К РАЗГРУЗКЕ ИЗ ТРАНСПОРТНОГО СРЕДСТВА | 1989 |
|
RU2033378C1 |
| Уравнивающий мостик | 1989 |
|
SU1664695A1 |
| Уравнивающий мостик для перегрузки грузов с рампы на транспортное средство | 1980 |
|
SU927697A1 |
| УНИВЕРСАЛЬНЫЙ БОРТОВОЙ ПОДЪЕМНИК ДЛЯ ПАССАЖИРОВ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ | 2019 |
|
RU2726211C1 |
| ГРУЗОВАЯ КОЛЕСНАЯ МАШИНА | 2007 |
|
RU2347692C1 |
| Грузовой самолёт интегральной схемы с неотклоняемой хвостовой рампой для погрузки и выгрузки крупногабаритного груза | 2017 |
|
RU2668881C2 |
| Устройство для погрузки и выгрузки грузов из транспортных средств | 1986 |
|
SU1402526A1 |
| СИСТЕМА ДЛЯ ЗАГРУЗКИ И ТРАНСПОРТИРОВКИ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294889C1 |
Изобретение относится к устройствам механизации погрузочно-разгрузочных работ при перевозке автомобильным транспортом штучных грузов и позволяет расширить функциональные возможности. Устройство для погрузки и выгрузки грузов из транспортных средств содержит установленные на рампе шарнирно связанные самоходные опоры 1 с подъемными платформами, на которых установлены кинематически связанные с опорами 1 выдвижные грузонесущие элементы 11 для взаимодействия с грузом. В исходном состоянии рабочие поверхности рампы и подвижной платформы совпадают. На рампе установлены дополнительные переходные мостики. Контейнеры 17 с грузом устанавливаются на опоры 16 над платформами 2 и между ними и захватываются платформами 2 и грузонесущими элементами 11, которые связаны посредством подпружиненных пружиной 12 тросов 14 с кронштейном 15 самоходной опоры 1, которые перемещают контейнеры в транспортное средство. 1 з.п. ф-лы, 4 ил.
Фив. 7
| Устройство для перегрузки тарных грузов | 1987 |
|
SU1532485A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
