fS
I S
:л
// ГуТхТ
А/ А А / / ЧРУ- ;/ / 1/ ч у
Ьд
oi
Ю
te
Изобретение сзтнос.ится к срелг.твам механизяцин погрузочно-раэгрузочных работ, свяэая.кьк с погручкой и выгрузкой контейнеров и пакетных грузов на автомобкпьном транспорте.
Цель изобретения - повышение надежности путем обеспечения плавности транспортирования.
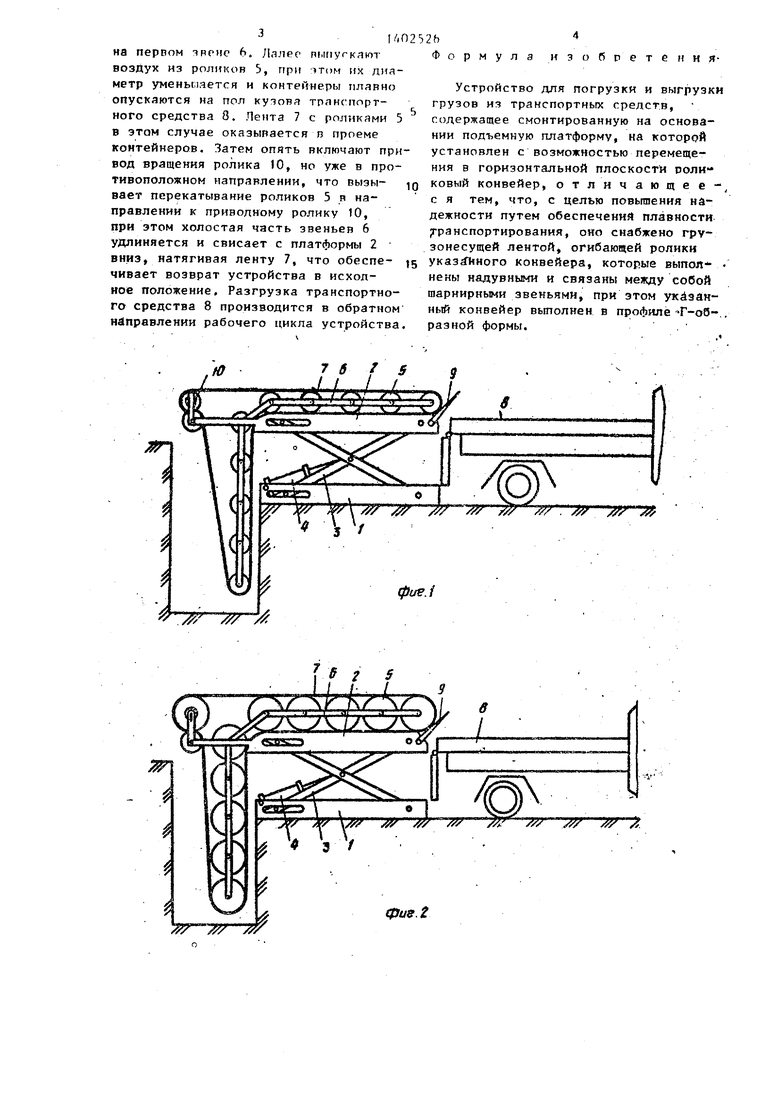
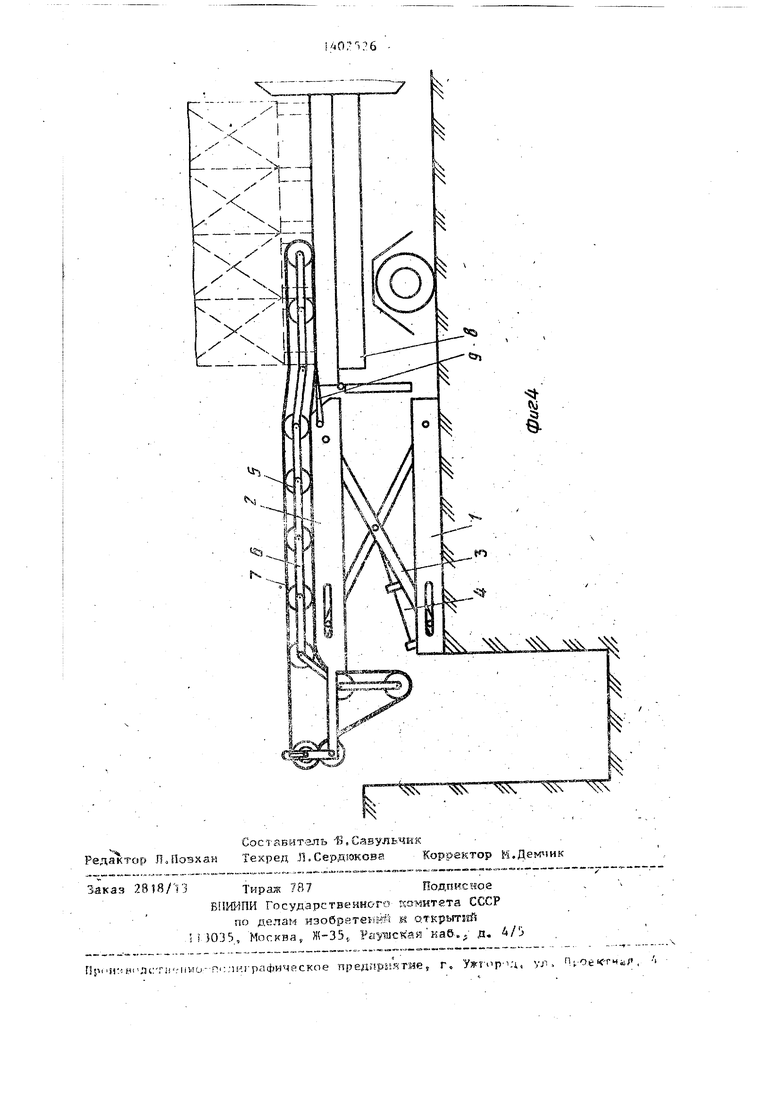
На фиг, 1 представлено устройство, общий ВИД1 на фиго 2 - то же, с нака чанньми воздухом роликами; на фиг.З- :то же при погрузке груза; на фиг,4 - :то же, при возврате в исходное полб- ;жение,
i Устройство содержит основание 1, ;на котором смонтирована платформа 2 подъемным механизмом 3 и приводом 4 I подъема. На платформе 2 установлен роликовый конвейер, содержащий на- дувные ролики 5, которые связаны меж- ; ду собой шарнирно звеньями 6, Ролики ; огибает бесконечная лента 7, Со сто- ; роны« обращенной к транспортному . средству 8« платформа 2 снабжена переходным мостиком 9, а с противоположной стороны - приводным роликом Ш Ролики вьтолнены в виде пустотелых камер, диаметр которых может изме- ; няться при наполнении их сжатьм воз- . Исходное положение предложен- ,юго устройства показано ка фиг.1. Платформа 2 с помощью приводе А под- Яйта на уровень кузова транспор гяого средства 8 Рабочая часть звеньев 6 с рогшками 5 уложена на поверхность платформы 2 на 5зсю ее длину, а холостая часть звеньев свисает с платфор- ш 2 со стороны приводного ролика 10 которьй связан с электроприаодом ЕГО вращения, образуя Г-образнуда форму - ® профиле 4 Воздух в роликах 5 отсут- с гэует и поэтому их диамгтр митша ле«. Диаметр роликов 5 при отсутстви 3 НИХ аоядуяа с учетом удвоенной тол щины бесконечной ленты 7 должен быть чем выемка нижней части загружаемых контейнеров, т.е, ролики 5 с лентой 7 должны свободно проходить
п
Б указанную выемку контейнера.
Устройство работает следукщим об- разо-ь
Заполняют ролики 5 эоздухом. При этом их диаметр увеличивается В этом состоянии диаметр роликов 5 должен 55 превьгоать выемку контейнера
Устройство работает следующим образом
50
S
0
п
5
Заполняют ролики 5 воздухом. При этом их диаметр увеличивается. В этом состоянии диаметр роликов 5 должен превьпаать выемку контейнера. Далее начинается загрузка устройства и транспортного средства 8 контейнерами. Первый контейнер устанавливают на ленту 7 со стороны приводного ролика 10, Затем включают привод вращения ролика 10, При этом контейнер по ленте 7 начинает перемещаться в направлений к транспортному средству 8, Так как холостая часть звеньев 6с роликами 5 свисает с платформы 2, то она натягивает ленту 7, и последняя принимается к роликам 5 на рабочей ветви. Кроме того, контейнеры с грузом также прижимают пецту 7 к роликам 5 на рабочем участке звеньев 6, Так как лента 7 уложена на платформу 2, то нижняя ее часть не перемещается благодаря силам трения, возникаюощм между лентой 7 и платформой 2, а
5 верхняя часть ленты 7, расположенная над роликами 5, перемещается- в продольном направлении. Это продоль нее перемещение ленты 7 приводит к , вращению роликов 5 и передвижению ия к транспортному средству. Благодаря тому, .что ролики 5 объединены звеньями 6, то холостая часть при этом вытягивается на поверхнфсть платформы 2, т.е. рабочая часть звеньев 6 с роликами 5 увеличивается по длине. По мере движения контеййе- ров по ленте 7 на неа со стороны приводного ролика 10 устанавливайт новые контейнеры. Количество контейнеров, устанавливаемьт на ленту 7, принимается По длине загрузки кузова транспортного средстаа. Так как роли- ки 5 перекатываются, то происходит удлинение рабочей части звеньев 6 м лента 7, причем это удлинение пронс
ходит в направлении к транспортному средству (в направлении вращения рс ликов). Первый по ходу перекатывания ролик 5 упирается в переходной мостик 9 и отклоняет его н горизонтали0 нов положение, что обеспечивает соя- , динение поверхностей платфор лы 2 и кузова транспортнрто средства б. При подходе ленты 7 к торцу кузова транспортного средства 8 привопиой ро- : лик 10 отключают от привода его,вращения. Сигнализатором достижения торца |сузова -лентой 7 может служить
0
5
концевой выключатель, устанавливаемый
/|П25
на первом чнрнс 6, Лллео пмиугкяют воздух из роликов 5, при 1Т()М их диаметр уменьшается и контейнеры плавно опускаются на пол кузова трпнспорт- ного средства 8. Лента 7 с роликами 5 в этом случае оказывается п проеме контейнеров. Затем опять включают привод вращения ролика 10, но уже в противоположном направлении, что выэы- Q вает перекатывание роликов 5 в направлении к приводному ролику 10, при этом холостая часть звеньев 6 удлиняется и свисает с платформы 2 вниз, натягивая ленту 7, что обеспе- j5 чивает возврат устройства в исходное положение. Разгрузка транспортного средства 8 производится в обратном направлении рабочего цикла устройства.
о р м у л 3 изобретенияУстройство для погрузки и выгрузк грузов из транспортных средств, содержащее смонтированную на основании подъемную платформу, на которой установлен с возможностью перемещения в горизонтальной плоскости роликовый конвейер, отличающеес я тем, что, с целью повышения надежности путем обеспечения плавности ;гранспортирования, оно снабжено гру- зонесущей лентой, огибающей ролики указйТ1Ного конвейера, которые выпол нены надувными и связаны между собой шарнирными звеньями, при этом укйэан- ный конвейер выполнен в профиле Г-образной формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2333879C1 |
| Система с автоматизированным подъемным узлом и способ погрузки и выгрузки груза из грузового транспортного средства | 2020 |
|
RU2818069C2 |
| Пространственная транспортная система | 1981 |
|
SU982991A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| СИСТЕМА ПОГРУЗКИ ГРУЗОВОГО АВТОМОБИЛЯ | 2019 |
|
RU2784834C2 |
| Устройство для загрузки и разгрузки транспортных средств | 1986 |
|
SU1404426A1 |
| СПОСОБ ПРОФЕССОРА КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ КРУПНЫМИ БЛОКАМИ | 2011 |
|
RU2459078C1 |
| Устройство для погрузки и разгрузки штучных грузов на транспортное средство | 1981 |
|
SU1020280A1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ ИЗ КРЫТЫХ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU231374A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ И ПЕРЕМЕЩЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 1993 |
|
RU2077466C1 |
Изобретение относится к средствам механизации погрузочно-раэгрузоч- ных работ, связанных с погрузкой и выгрузкой контейнеров и пакетных грузов на автомобильном транспорте. Цель изобретения - повьппение надеж нрсти nyteM обеспечения плавности транспортирования. Устройство содержит .основание, на котором смонтирова- на подъемная платформа 2, снабженная роликовым конвейером с грузенесущей лентой 7 с приводньгм роликом 10 и надувными изменяющимися по диаметру роликами 5. Ролики 5 связаны между собой шарннрно звеньями 6 и образуют конвейер Г-образной формы с рабочей частью, размещаемой горизонтально на платформе 2, и холостой вертикальной частью. Перед включением приводного ролика 10 все ролики 3 наполняют сжатым воздухом. На рабочую часть ленты 7 устанавливают кон- тейнерь и включают привод вращения ролика 10, Контейнеры перемещают в кузов транспорткого средства 8 на грузонесущей ленте} .которая перемещается и перекатывает надувные роЛи- K ii 5, Затем выпускают из роликов воз дух, при этом ролики уменьшают свой диаметр, контейнеры опускаются на пол кузова. Вращение ленты реверсируется и устройство возврйщается в исходное положение. 4 ил С
.Ю 7 б f S9
J .J ij ,
/„л J . ч / ,. J ..,1 if
I гУ - - - J - -- uf
.У|.., -1TM,M, Vt
Х« I
.x:: У
7/7 л /i / //f / X
f
/7Г
/яЛ
фие.1
Сост авит.эль 15,Савульчик
Редактор ЛоПовхан Техред Л.СердюковаКорректор М.
Заказ 2818/V3Тираж 787Подписное
Государственного комитета СССР
по делам изобрйте Ё гй м о.ткрьтгй ПЮ35, Москва, Раушск ая каб. д. /-/)
NX
4 Cv
| Патент Великобритании № 1438059, кл | |||
| В В Е, 1976. |
