В-6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи предметов | 1987 |
|
SU1523489A1 |
| Устройство подачи предметов | 1986 |
|
SU1370030A1 |
| Устройство для автоматической установкиРАдиОэлЕМЕНТОВ HA плАТу | 1979 |
|
SU830669A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| Перегрузочное накопительное устройство для контейнеров | 1987 |
|
SU1735169A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ЭЛЕКТРОННЫХ КОМПОНЕНТОВ НА ПЕЧАТНОЙ ПЛАТЕ | 1994 |
|
RU2082291C1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Устройство для установки радиоэлементов на печатные платы | 1990 |
|
SU1709575A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Автоматическая линия для упаковывания электрических ламп | 1987 |
|
SU1620371A1 |
Изобретение относится к транспортным средствам и позволяет повысить точность позиционирования предметов на цепном конвейере /ЦК/. Последний выполнен в виде связанных осями 14, 15, первые из которых центральные, звеньев цепи. На звеньях смонтированы упоры для ограничения двух соседних звеньев цепи и опоры, расположенные с противоположной стороны от оси 14. Цепи огибают отклоняющие элементы, закрепленные на раме. На раме стонтированы приводы ЦК, координатный стол, установленный на позиции разгрузки, и многопозиционный питатель, установленный на позиции разгрузки. Оси 14 выполнены с продольными отверстиями, в которых установлены цилиндрические части 17 корпусов захватов. Корпуса захватов имеют направляющие элементы 22, которые расположены в направляющих 23, смонтированных на раме вдоль ЦК. Захват имеет вакуумную присоску 21 и привод 31. Радиоэлементы 20 подаются многопозиционным питателем и захватываются присоской 21, срабатывающей от привода 31. Присоской 21 радиоэлемент подается в захват и включается привод ЦК. При этом за счет перемещения элементов 22 в направляющих 23 осуществляется точное позиционирование радиоэлементов 20. 1 з.п. ф-лы, 13 ил.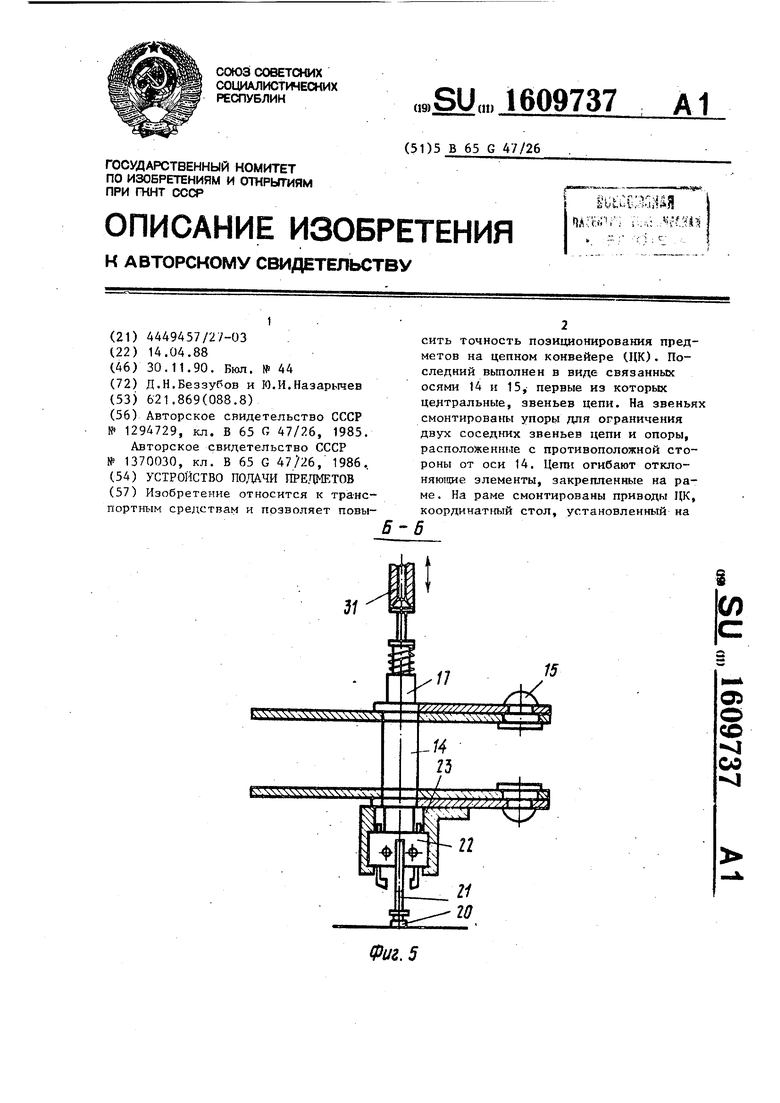
(Л
О)
о со vl
со
Фиг. 5
позиции разгрузки, и многопозиционный питатель, установленный на позиции разгрузки. Оси 14 выполнены с продольными отверстиями, в которых установ- лены цилиндрические части 17 корпусов захватов. Корпуса захватов имеют направляющие элементы 22, которые расположены в направляющих 23, смонтированных на раме вдоль ЦК. Захват имеет вакуумную присоску . 1 и приИзобретение относится к транспортным средствам сЬорочных автоматов, связывающим питатели с. набором различных предметов, например радиоэле- ментов с платой, на которую эти элементы устанавливаются.
Цель изобретения - повыщение точности позиционирования предметов на цепном конвейере.
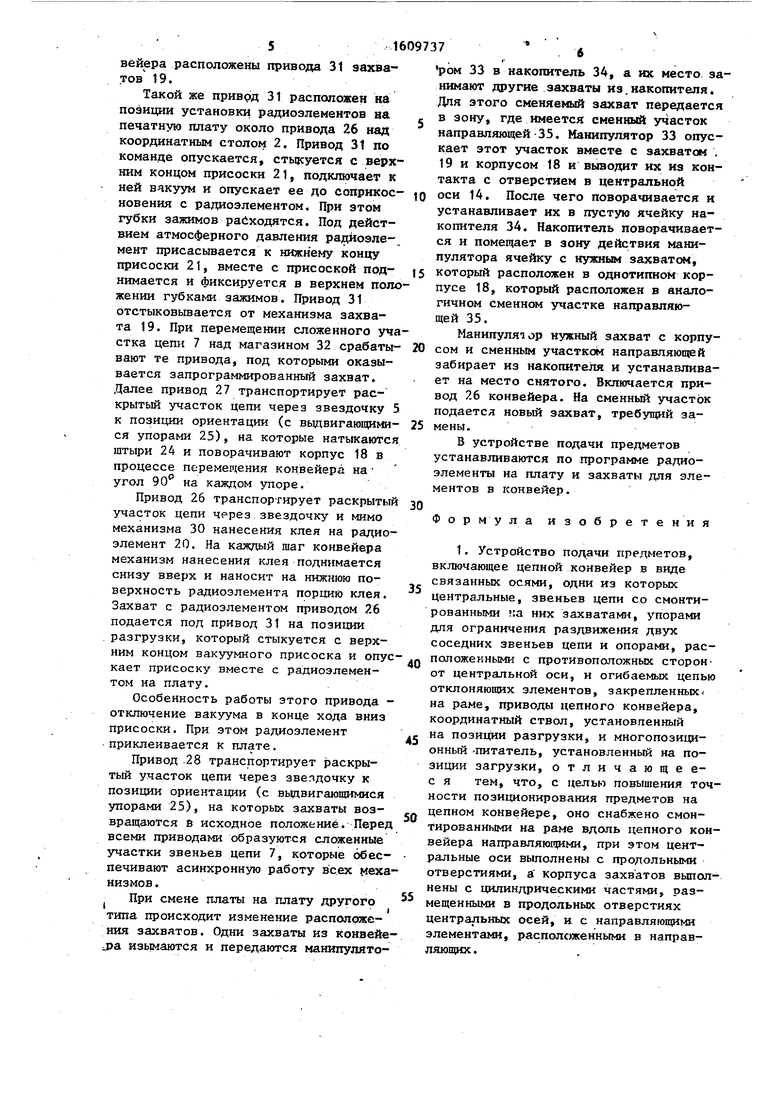
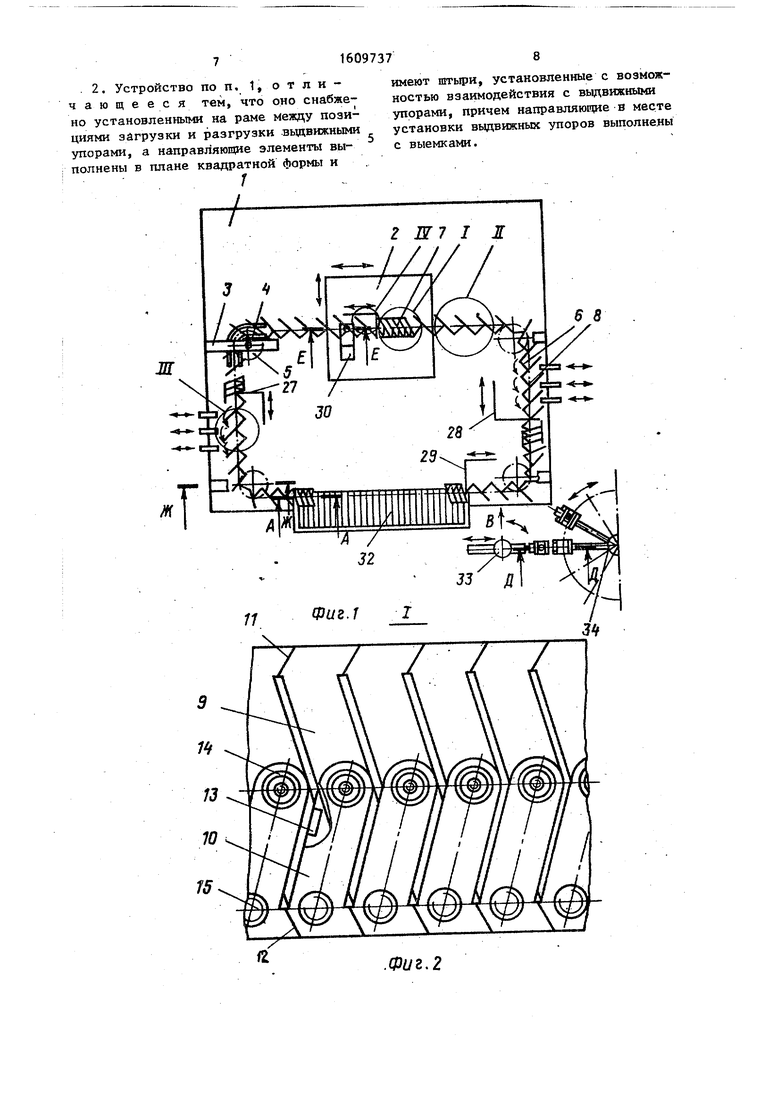
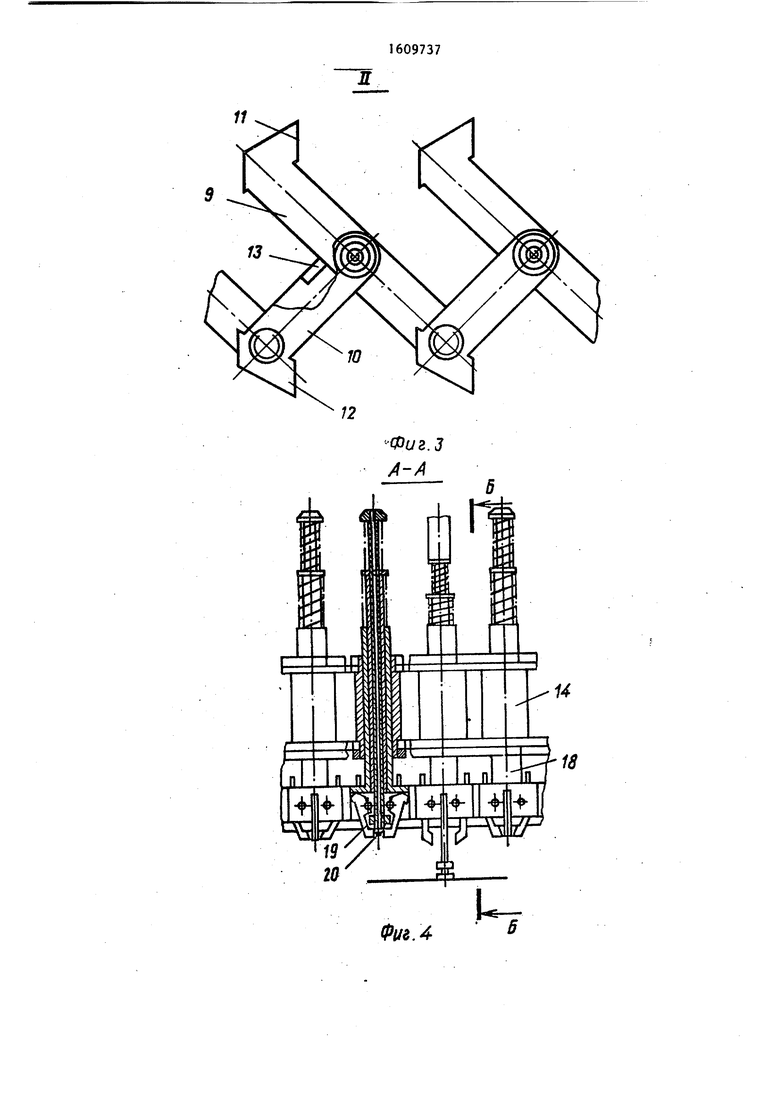
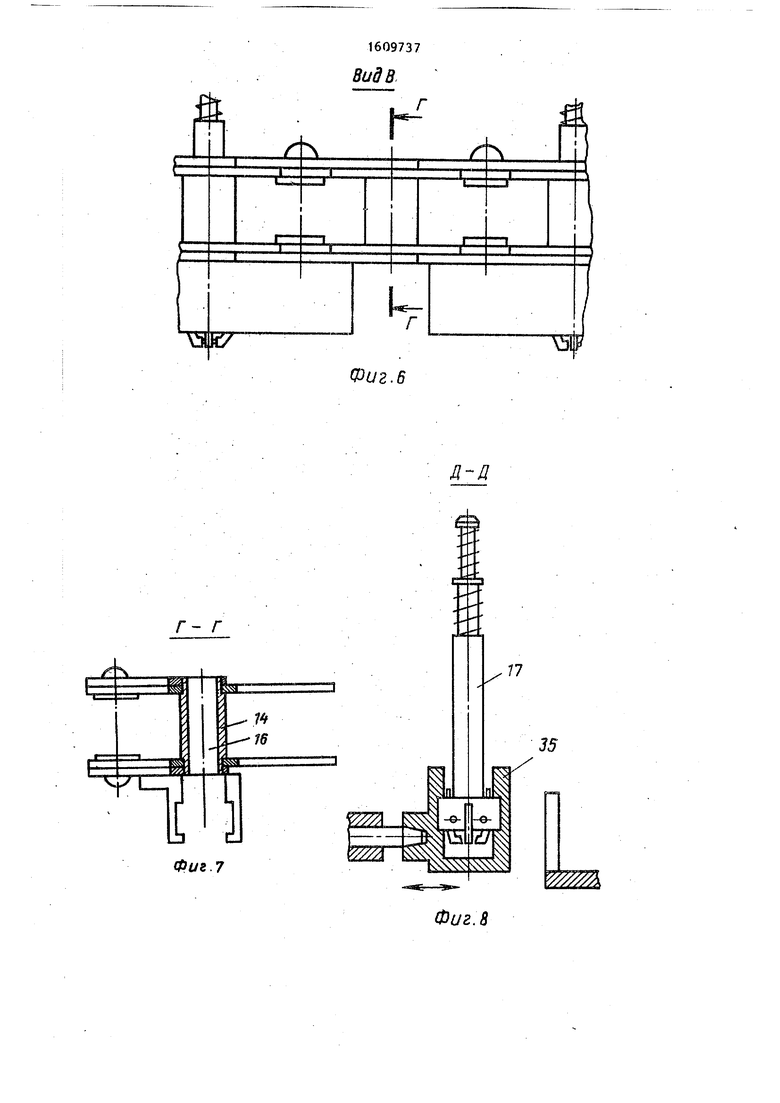
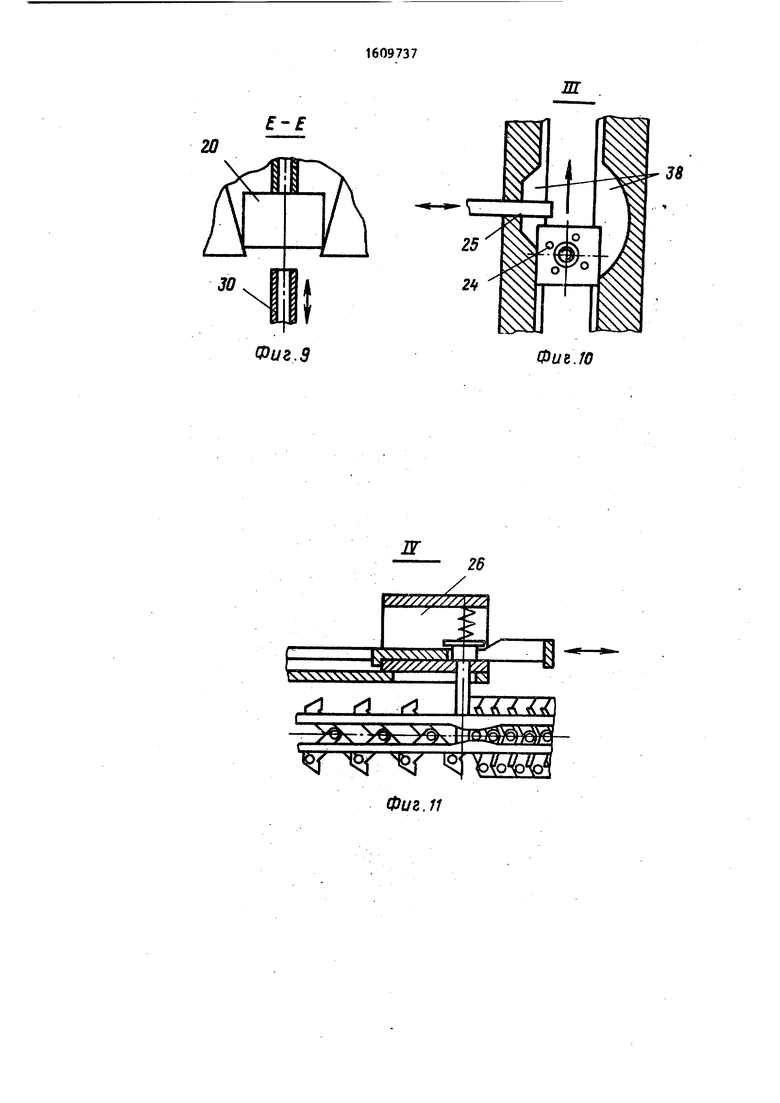
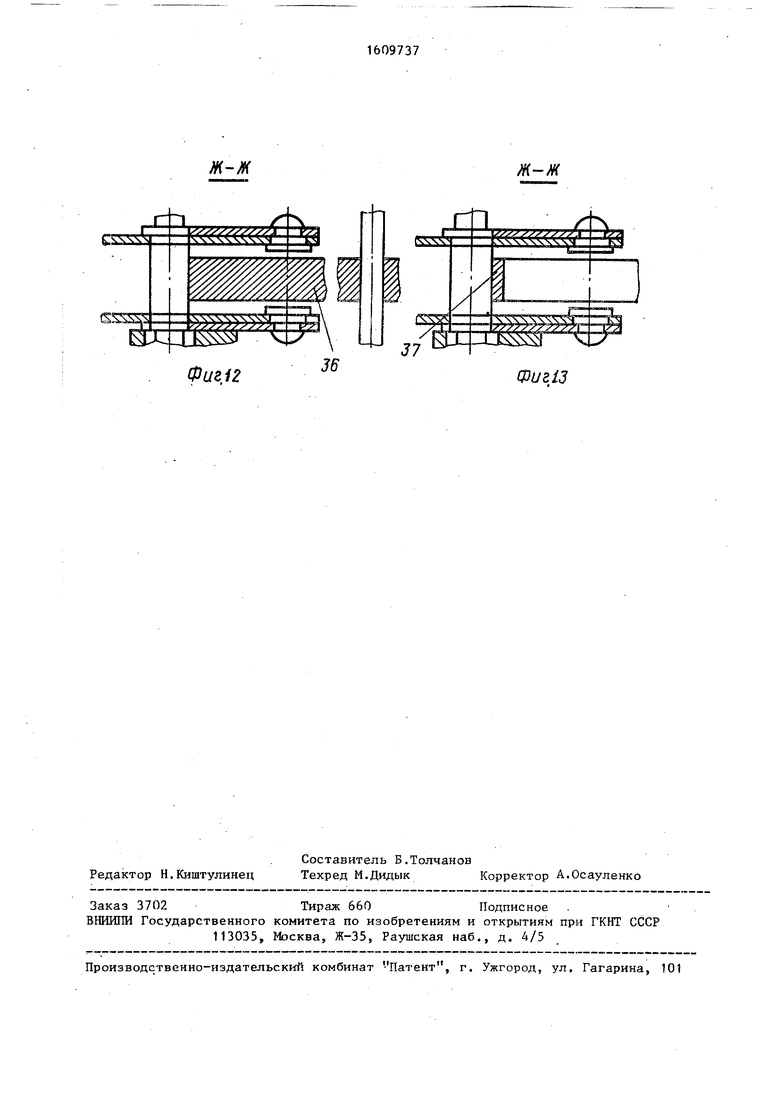
На фиг. 1 изображено предлагаемое устройство,-общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - узел II на фиг. 1; на фиг. 4 - разрез А-А на фиг. 1; на фиг. 5 - разрез Б-Б на . фиг. 4; на фиг. 6 - вид В на фиг. 1j на фиг. 7 - разрез Г-Г на фиг. 6|.на фиг. 8 - разрез Д-Д на фиг.1j на фиг.9 - разрез Е-Е на фиг. 1 на фиг.10 - узел III на фиг. 1; на фиг.11 - узел IV на фиг.1; на фиг.12 разрез Ж-Ж на фиг, 1; на фиг. 13 - то же, вариант.
Устройство подачи предметов содержит станину 1 с координатным столом 2 на позиции разгрузки и закрепленной на станине рамой 3, на которой на собственных осях 4 закреплены отклоняющие элементы в виде звездочек 5 на которые одет цепной конвейер 6, выполненный в виде складывающейся цеп со сложенными участками 7 и раскрытыми участками 8. Звенья цепи 9 и 10 выполнены с опорами 11 и 12 и упорами 13 и соединены центральными осями 14 и осями 15. В центральных осях 14 выполнены продольные отверстия для размещения цилиндрической части 17 корпусов 18 захватов, внутри которых помещается механизм захвата 19 радиоэлементов 20. Захват снабжен вакуумной присоской 21, а направляющий элемент 22 корпуса 18 располагается в направляющих 23, расположен
вод 31. Радиоэлементы 20 подаются многопозиционным питателем и захватываются присоской 21, срабатывающей от привода 31. Присоской 21 радиоэлемент подается в захват и включается привод ЦК. При этом за счет перемещения элементов 22 в направляющих 23 осуществляется точное позицио- нирование радиоэлементов 20. 1 з.п. ф-лы, 13 ил.
5
.
5
0
0
5
ных вдоль цепного конвейера 6 и смонтированных на раме 3, В поперечном сечении направляющий элемент 22 корпуса 18, находящийся в направляющих 23, имеет квадратную форму и снабжен штьфями 24, взаимодействующими с выдвигающимися упорами 25, смонтированными на раме 3. Конвейер снабжен одинаковыми четырьмя приводами 26-29.
На раме 3 закреплен механизм 30 нанесения клея и привод 31 захвата 19 в позиции разгрузки над координатным столом 2. . .
На станине .1 на позиции загрузки установлен магазин 32 в виде многопозиционного питателя и привода 31 захвата 19.
, Около станины установлен манипулятор 33 и накопитель 34, в ячейках которого находятся одинаковые сменные участки направляющей 35 с корпусами 18, внутри которых находятся различные захваты для различных радиоэлементов .
Вместо звездочек 5 в конвейере могут быть установлены блоки 36 или неподвижные направляющие 37. Направляющие 23 в месте установки упоров 25 выполнены с выемками 38.
Устройство работает следующим образом.
Радиоэлементы 20 находятся в магазине 32 так, что их ось симметрии совпадает с осью направляющих 23. Шаг между осями соседних элементов, находящихся под осью направляющих 23, равен или кратный расстоянию между соседними центральными осями 14 конвейеров в сложенном положении 7. Все привода могут перемещать лежащую перед ними центральную ось 14 на одно и то же расстояние: Над каждой ячейкой магазина 32 вдоль оси кон10
15
25
51609737
вёйера расположены привода 31 захватов 19.
Такой же приврд 31 расположен на позиции установки радиоэлементов на печатную плату около привода 26 над координатным столом 2. Привод 31 по команде опускается, стыкуется с верхним концом присоски 21, подключает к ней вакуум и опускает ее до соприкосновения с радиоэлементом. При этом губки зажимов райходятся. Под действием атмосферного давления радиоэлемент присасывается к нижнему концу присоски 21, вместе с присоской поднимается и фиксируется в верхнем положении губками зажимов. Привод 31 отстыковывается от механизма захвата 19. При перемещении сложенного участка цепи 7 над магазином 32 срабаты- 20 вают те привода, под которыми оказывается запрограммированный захват. Далее привод 27 транспортирует раскрытый участок цепи через звездочку 5 к позиции ориентации (с выдвигающимися упорами 25), на которые натыкаются штыри 24 и поворачивают корпус 18 в процессе перемещения конвейера на угол 90 на каждом упоре.
Привод 26 транспортирует раскрытый участок цепи через звездочку и мимо механизма 30 нанесения клея на радиоэлемент 20. На каждый шаг конвейера механизм нанесения клея поднимается снизу вверх и наносит на нижнюю поверхность радиоэлемента порцию клея. Захват с радиоэлементом приводом 26 подается под привод 31 на позиции разгрузки, который стыкуется с верхним концом вакуумного присоска и опускает присоску вместе с радиоэлементом на плату.
Особенность работы этого привода - отключение вакуума в конце хода вниз присоски. При этом радиоэлемент приклеивается к плате.
Привод .28 транспортирует раскрытый участок цепи через звездочку к озиции ориентации (с вьдвигающимися порами 25), на которых захваты возвращаются S исходное положение. Перед семи приводами образуются сложенные
р н к т о ко ся пу ко пу ги ще
со за ет во по ме
ус эл ме
30
Ф
35
40
45
50
частки звеньев цепи 7, которые обесечивают асинхронную работу всех мехаизмов.
При смене платы на плату другого ипа происходит изменение расположс- ия захватов. Одни захваты из конвейе- a изьтмаются и передаются манипулятовксв це ро дл со по от от на ко на онн зиц с я нос цеп тир вей рал отв нен мещ цен эле ляю
0
5
5
0
ром 33 в накопитель 34, а их место занимают другие захваты из.накопителя. Для этого сменяемый захват передается в зону, где имеется сменный участок направляющей-35. Манипулятор 33 опускает этот участок вместе с захватом , 19 и корпусом 18 и выводит их из контакта с отверстием в центральной оси 14. После чего поворачивается и устанавливает их в пустую ячейку накопителя 34. Накопитель поворачивается и помещает в зону действия манипулятора ячейку с нужным захватом, который расположен в однотипном корпусе 18, который расположен в аналогичном сменном участке направляющей 35.
Манипулятор нужный захват с корпусом и сменным участком направляющей забирает из накопитеJra и устанавливает на место снятого. Включается привод 26 конвейера. На сменный участок подается новый захват, требущий замены.
В устройстве подачи предметов устанавливаются по программе радиоэлементы на штату и захваты для элементов в конвейер.
30
Формула
изобретени
35
40
5
0
6 В
.Фиг.2
Фиг. 4
г- г
fe
74 16
Г
Фиг.7
77
J5
51
Si
Фиг.8
-f
30
Фиг. 9
«Rf Ы& Фиг. 11
Фи.Ю
fKss
Фиг 12
ж-ж
| Устройство подачи предметов | 1985 |
|
SU1294729A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство подачи предметов | 1986 |
|
SU1370030A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
