Фиг. 7
Изобретение относится к машиностроению и может быть использовано в робототехнике при выполнении транспортных операций.
Целью изобретения является расширение технологических возможностей за счет увеличения точек позивдони- рования„
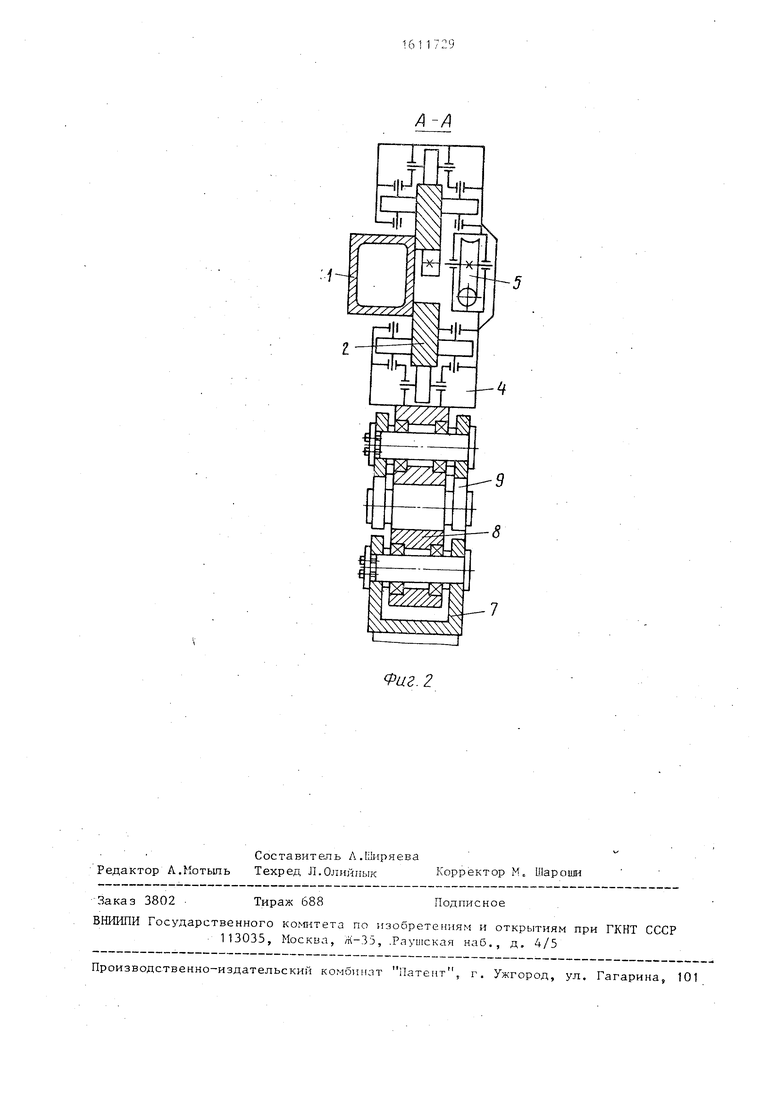
На фиг. 1 изображено устройство, общий вид; на фиг 2 - разрез А-А на фиг. 1.
Транспортный, манипулятор состоит из портала 1 с закрепленной на нем направляющей в виде планки. 2, основной 3 и дополнительной 4 кареток с приводами 5 их перемещений вдоль портала 1 и механической руки 6, несущей захват 7.
Механическая рука 6 выполнена в виде па.раллелограммного механизма, включающего два параллельных рычага 8 и один дополнительный рычаг 9. Концы каждого из парал лельных рьМагов 8 I закреплены соответственно на корйусе I основной каретки 3 и захвате 7, а :Допол нительный рычаг 9 шарнирно свя- :зывает корпус дополнительной карелки 14 с серединной одного из параллельных рычагов 8„ Причем длина дополнительного рычага 9 равна половине длины каждого из параллельных рычагов 8
Привод 5 перемещения каждой из кареток 3 и 4 выполнен в виде шагового .двигателя и зубчато-реечной передачи зубчатая рейка 10 которой смонтирована на портале- 1 ,. а зубчатое колесо ;кинематически х:вязано с выходным ва- |Лом двигателя о
Транспортный манипулятор работает следующим образом.
В исходном (транспортном) положении механическая рука 6 .с захватом 7 |находится в верхнем положении. Пере- |мещение транспортного манипулятора в |нужную позицию по координате вдоль портала осуществляется по направляю- |щей 2 портала 1 одновременной и син- хронной работой приводов 5 перемеще- |ний, взаимодействзтощих с зубчатой
0
5
0
5
рейкой 10. Синхронность работы приводов 5 перемещения обеспечивает постоянное расстояние между основной 3 и дополнительной 4 каретками, обеспечивая тем самым постоянство положения захвата 7 по вертикали. При необходимости опускания захвата 7 привод 5 перемещения основной каретки 3 выключается, фиксируя тем самым положение основной каретки 3, а привод 5 перемещения дополнительной каретки 4 перемещает дополнительную каретку 4 к основной каретке 3, в результате чего захват 7 опускается, причем дополнительный рычаг 9 обеспечивает . прямолинейность, перемещения захвата 7 по вертикали.. Подъем захвата 7 осуществляется разведением основной 3 и дополнительной 4.кареток работой привода 5 перемещения дополнительной каретки 4.
Формула изобретен и я
Транспортный манипулятор, содержа- портал с направляющей, основную каретку, установленную на направляющей, механическую руку с захватом
и привод перемещения основной каретки, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения числа точек позиционирования, он
снабжен дополнительной кареткой, установленной на направляющей портала, и приводом ее перемещения, а механическая рука выполнена в виде паралле- лограммного механизма, содержащего
два параллельных и один допачнитель- ный рычаги, один из концов у каждого . из параллельных рычагов шарнирно закр еплен на основной каретке, а дру- гой связан с захватом, причем концы
дополнительного рычага щарнирно связаны соответственно с допол нительной кареткой и с серединой одного из параллельных рычагов и длина этого ьиага равна половине длины каждого
з параллельных рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1423368A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Манипулятор | 1990 |
|
SU1743844A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1093541A1 |
| Манипулятор | 1986 |
|
SU1430257A1 |
| Технологический комплекс | 1985 |
|
SU1284825A1 |
| ГЕРМЕТИЗАЦИОННЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ЭКИПИРОВАННЫХ ФИЛЬТР-ЭЛЕМЕНТАМИ КОРПУСОВ СЕКЦИЙ ФИЛЬТРУЮЩИХ КОРОБОК | 1992 |
|
RU2045357C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| УСТРОЙСТВО ДЛЯ ПРИВАРКИ УСИЛИТЕЛЯ К ПЛОСКОМУ ЛИСТУ | 2024 |
|
RU2834726C1 |
Изобретение относится к области машиностроения и может быть использовано в робототехнике при выполнении транспортных операций. Целью изобретения является расширение технологических возможностей за счет увеличения точек позиционирования. Транспортный манипулятор содержит портал 1 с направляющей 2, основную 3 и дополнительную 4 каретки с приводами 5 их перемещений вдоль направляющей 2 и механическую руку 6 с захватом 7. Механическая рука 6 выполнена в виде двух параллельных рычагов 8, шарнирно закрепленных на корпусе основной каретки 3 и захвата 7, и дополнительного рычага 9, шарнирно связанного с серединой одного из параллельных рычагов 8 и с корпусом дополнительной каретки 4. Длина дополнительного рычага 9 равна половине длины параллельных рычагов 8. 2 ил.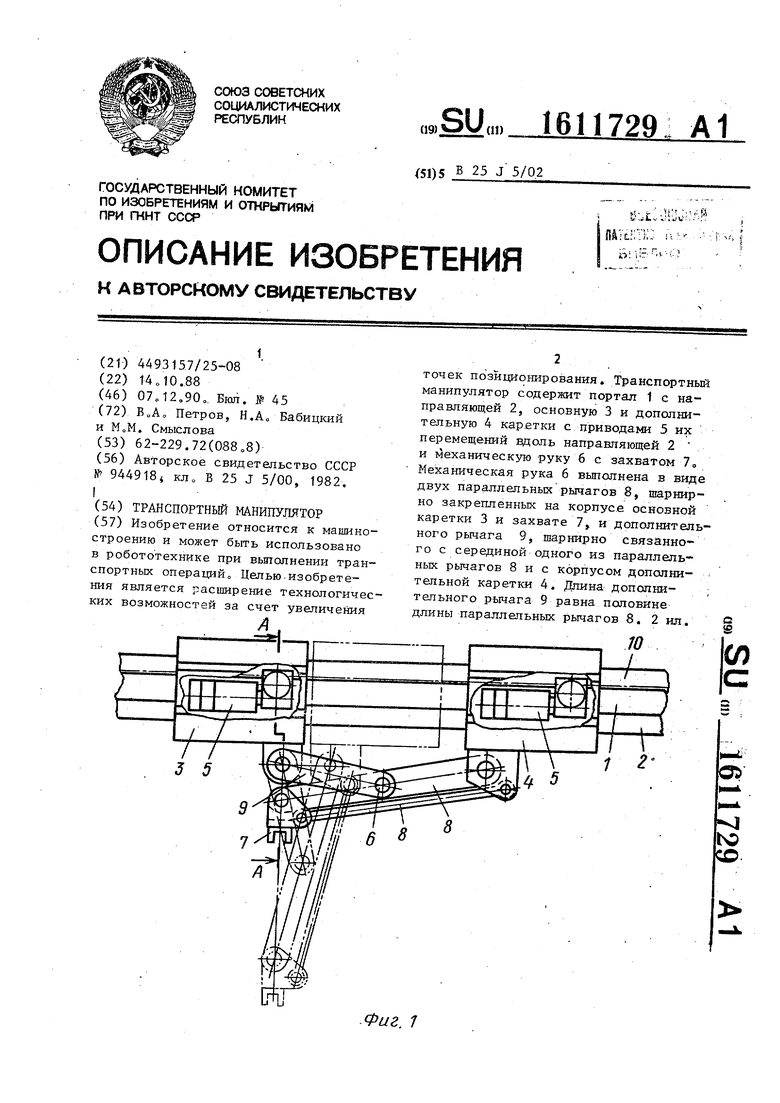
Составитель Л.Ширяева Редактор А.Мотыль Техред Л.ОлийиыкКорректор М. Шароши
Заказ 3802
Тираж 688
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, .Рауи1ская наб., д, 4/5
Производственно-издательский комбинат Патеит, г. Ужгород, ул. Гагарйн О
иг.2
Подписное
