Изобретение относится к машиностроению и может быть использовано для загрузки деталей транспортиру- емых к многошпиндельным токарным полуавтоматам.
Цель изобретения - повьшение точности позиционирования транспортируемых к станку деталей, имеющих базовое центральное отверстие.
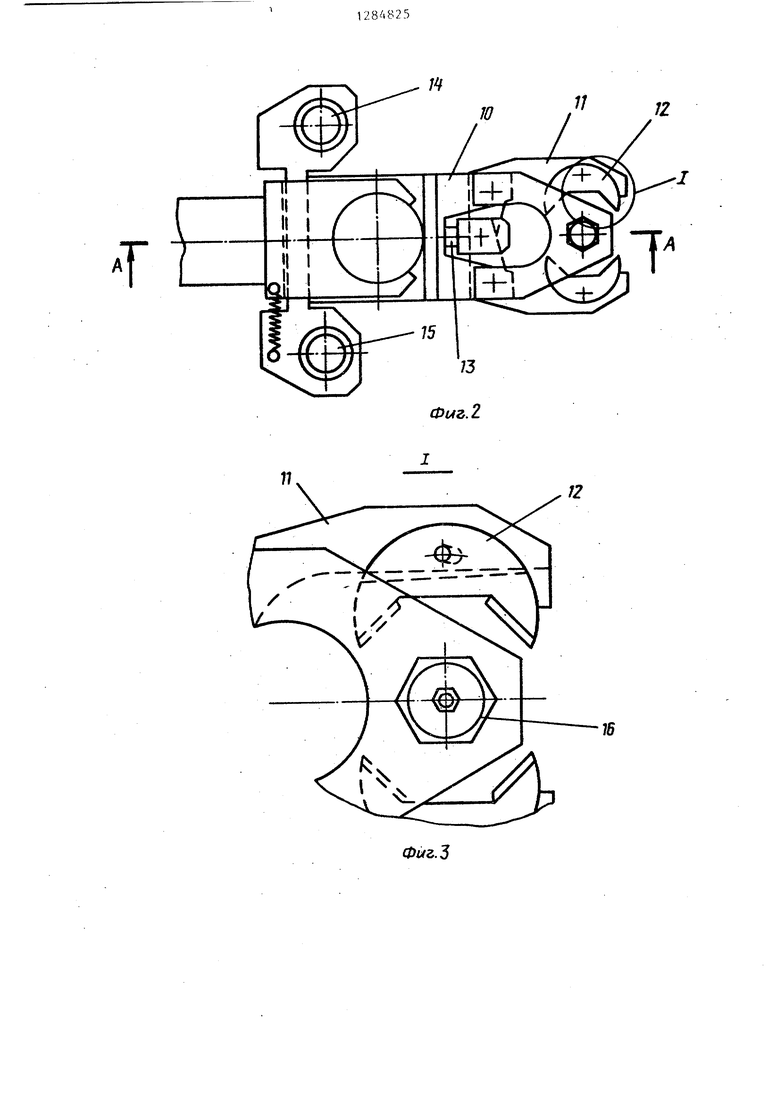
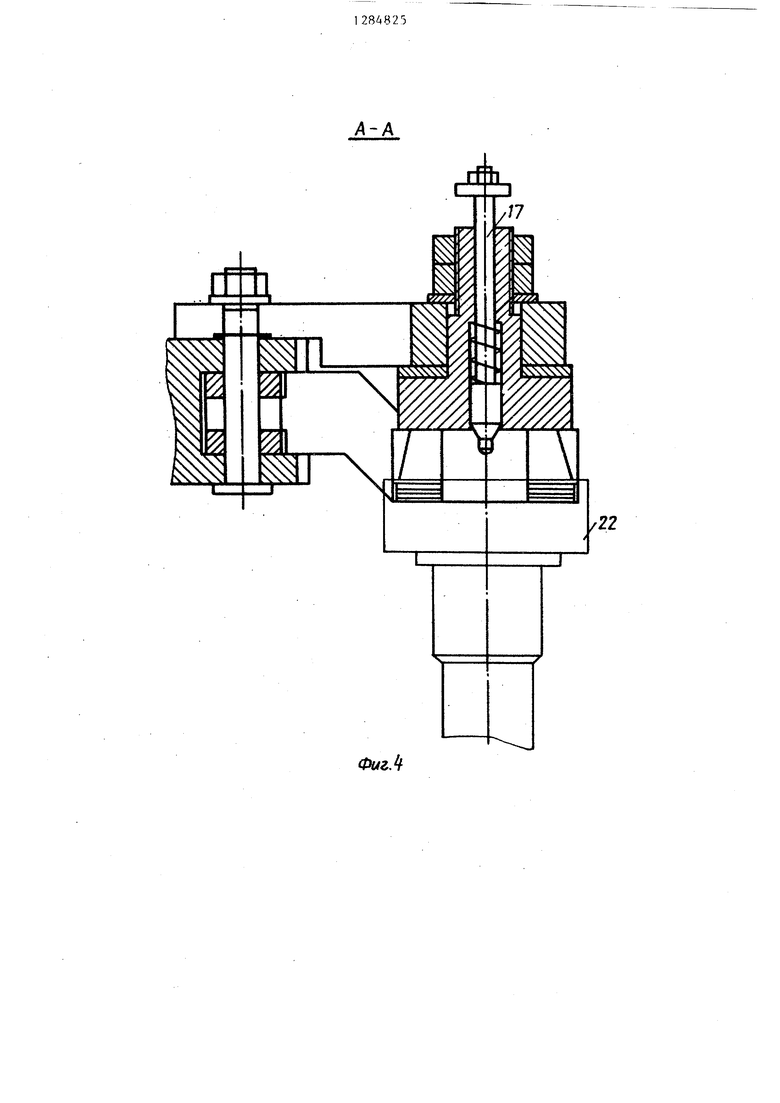
На фиг. 1 показано взаимное поло- жение станка и манипулятора; на фиг. 2 - захват манипулятора, на фиг. 3 - вид Г на фиг. 2, на фиг.4 - разрез А-А на фиг. 2} на фиг.5 - крепление направляющих стержней на станке, на фиг. 6 - разрез Б-Б на фиг. 5.
Технологический комплекс состоит из станка 1 со шпинделями 2, портала 3, на котором с возможность переме- щения смонтирована тележка 4 с кареткой 5, на валу 6 которой установлены с возможностью поворота вокруг своих продольных осей механические ру- ки 7 ,и 8 с захватами 9. Каждый захва 9 состоит из корпуса 10, на котором шарнирно смонтированы зажимные рычаги 11 с плавающими губками 12 и привод 13 рычагов, В корпусе 10 захвата выполнены три отверстия 14-16, оси которых параллельны между собой и перпендикулярны продольной оси механической руки, В отверстии 16 смонтирован подпружиненный в направлении его оси фиксатор 17.
На станке с помощью регулируемой по положению планки 18 закреплены два направляющих стержня 19 и 20. В состав комплекса входит также накопитель 21 ориентированных деталей 22.
Технологический комплекс работает следующим образом.
Деталь подъемником (не показан) . подается в захват 9 манипулятора до упора и зажимается. Фиксатор 17 при этом-попадает в центровое отверстие детали, а губки 12 зажимают деталь 2 После зажима детали и опускания подъемника вал 6 с механическими руками 7 и 8 поворачивается относитель но вертикальной оси на IBO. При это захват 9 на руке 7 поворачивается на
90 относительно ее продольной оси, переводя ось детали 22 из вертикального в горизонтальное положение. Далее тележка 4 перемещается вдоль портала 3 к станку 1. После этого каретка 5 поперечного перемещения с Механическими руками движется в направлении загрузки детали в шпиндель станка. При этом захват 9 ориентируется отверстиями 14 и 15 по направляющим стержням 9 и 20, после чего деталь точно вводится в шпиндель. Аналогично производится снятие со станка обработанной детали.
Формула изобретения
Технологический комплекс, состоящий из станка, имеющего шпиндель, и манипулятора, механическая рука которого имеет захватное устройство, содержащее корпус с зажимными рычагами и губками и привод, отличающийся тем, что, с целью повьше ния точности позиционирования транспортируемых к станку деталей, имеющих базовое центральное отверстие, в корпусе захватного устройства выполнены три отверстия, оси которых параллельны между собой и перпендикулярны продольной оси механической руки, причем первые два из указанных отверстий расположены с внешней стороны зажимных рычагов, а третье - между ними, и в нем установлен подпружиненный в направлении оси зтого отверстия фиксатор, предназначенный для взаимодействия с базовым отверстием захватываемой детали, а н а станке закреплены два направляющих стержня, расположенных с возможностью взаимодействия с первыми двумя отверстиями в корпусе захватного устройства, причем взаимное положение оси шпинделя станка и двух указанных направляющих стержней соответствует взаимному положению фиксатора и двух первых отверстий захватного устройства, а губки на рычагах захватного устройства выполнены плавающими относительно этих рычагов.
«Г
;;
12
13
Фиг. 2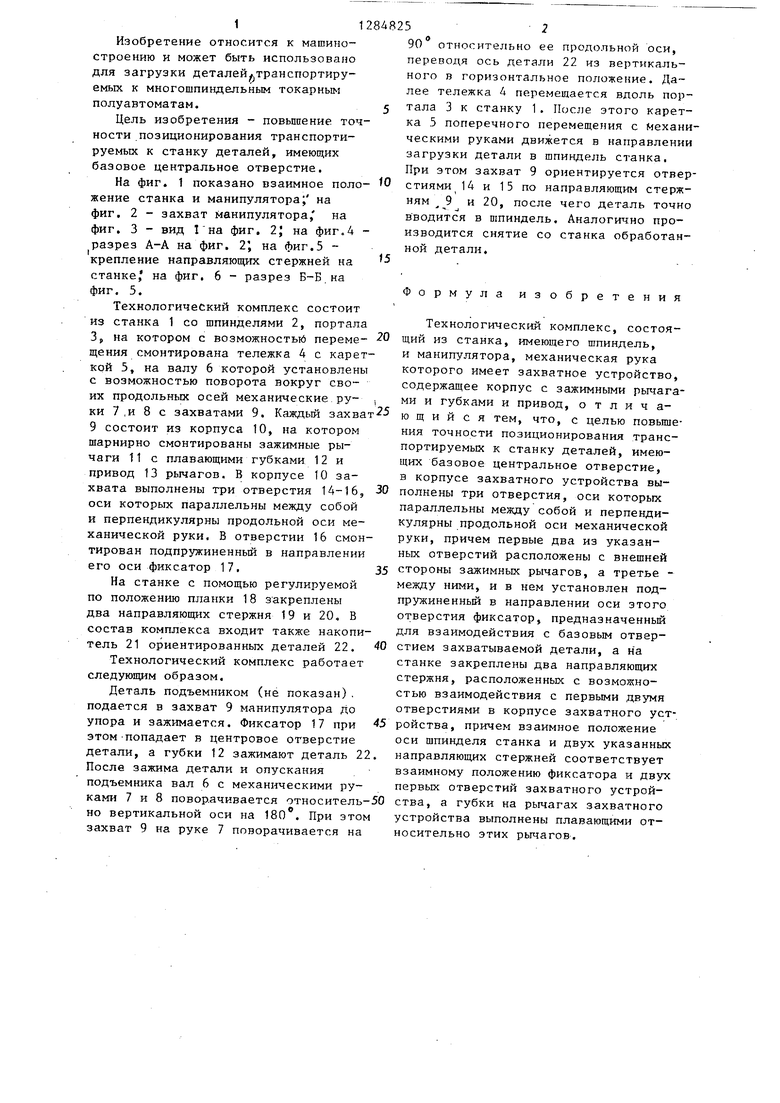
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Манипулирующее устройство | 1983 |
|
SU1146194A2 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Захватное устройство | 1988 |
|
SU1535716A1 |

Изобретение относится к строению и может быть использовано для загрузки деталей, транспортируемых к многошпиндельным токарным полуавтоматам. Цель изобретения - повышение точности позиционирования транспортируемьгх к станку деталей. имеющих базовое центральное отверстие. Технологический комплекс имеет станок 1 и портальный манипулятор с механическими руками 7 и 8, имеющими захваты 9. Транспортируемая деталь 22 зажимается в захвате 9, при этом фиксатор попадает в базовое центральное отверстие детали 22. Механические руки 7 и 8 смонтированы на поворотном валу 6 и при переносе деталей 22 от накопителя 21 к станку поворачиваются на 180 вокруг вертикальной оси вала 6. Захваты 9 при этом поворачиваются вокруг продольных осей механических рук 7 и 8 на 90. Базирование захвата на станке производится фиксирующими стержнями 19 и 20. 6 ил. (Л 6 Л V Г гл /7 ьэ 00 4 00 ГО СП
12
Фиг.З
Фиг А
Редактор И. Дербак
Составитель С. Новик Техред Л.Сердюкова
Заказ 7510/18. Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Корректор А. Зимокосов
| Козьфев Ю.Г | |||
| Промьшшенные роботы | |||
| Справочник - М.: Машинострое- .Ние, 1983, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
