Изобретение относится к области подъемно-транспортной техники, в частности к устройствам съема штучных грузов с подвесного толкающего конвейера (ПТК) и подачи их на движущийся конвейер сборки с сопровождением, и может быть использовано в автомобильной промышленности.
Целью изобретения является расширение технологических возможностей за счет обеспечения работы с подвесными и сборочными конвейерами, а также повышение надежности.
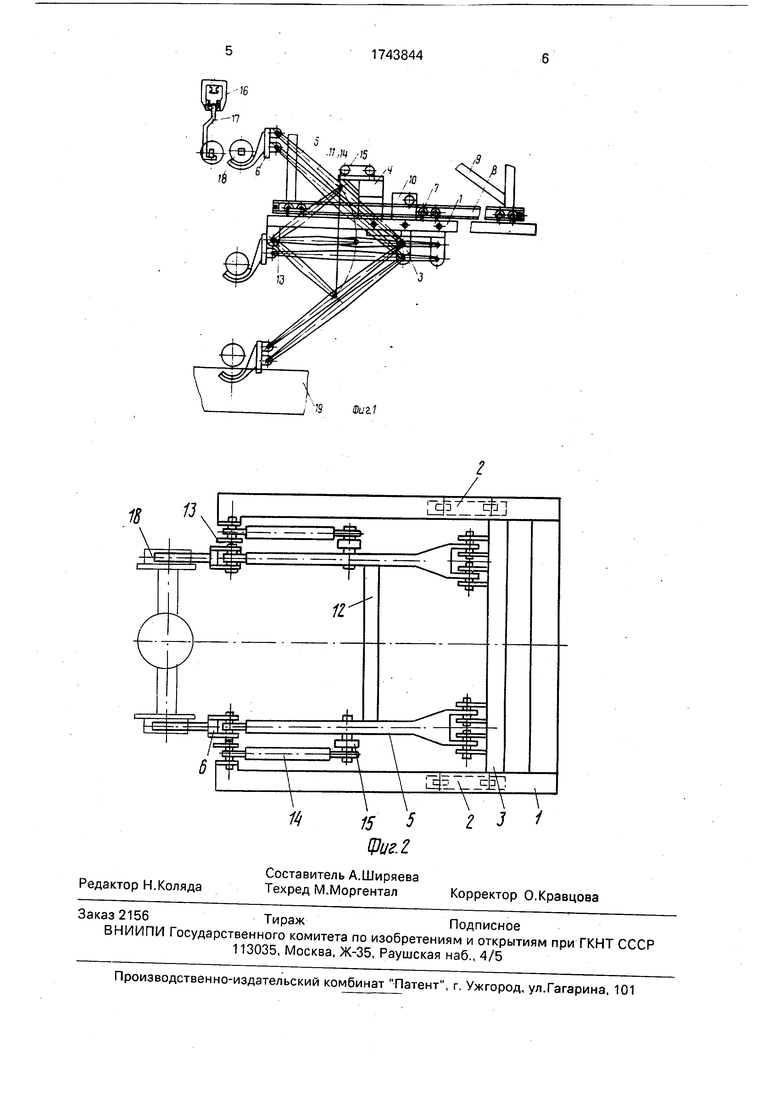
На фиг.1 изображен схематично манипулятор с тремя положениями рычажно- шарнирного механизма (верхнее, среднее и нижнее); на фиг.2 - то же, вид сверху.
Манипулятор содержит основание 1, на котором смонтированы направляющие 2, на которых установлена каретка 3 с приводом ее перемещения 4 и шарнирно-рычажная рука 5 с захватом 6.
Манипулятор устанавливается на ходовой каретке 7, перемещаемой по направляющим 8, закрепленным на поддерживающих
металлоконструкциях 9 цеха с помощью привода перемещения 10. Шарнирно-рычажная рука 5 выполнена в виде двух пар основных параллельных рычагов 11, каждая из которых шарнирно связана соответственно с захватом 6 и кареткой 3, образуя параллелограммы, плоскости которых параллельны между собой. Нижние основные параллельные рычаги 11 каждой из пар связаны между собой поперечиной 12.
На основании 1 стационарно установлены опоры 13, к которым шарнирно присоединены дополнительные рычаги 14, вторые концы которых шарнирно соединены с серединами верхних основных параллельных рычагов 11 параллелограммов.
Перемещение шарнирно-рычажной руки 5 осуществляется приводом перемещения 4 каретки 3, включающим гибкий тяговый орган 15.
Манипулятор расположен в пространстве под подвесным толкающим конвейером 16, несущим на подвесках 17 грузы 18 и подает их на сборочный конвейер 19.
VI
4 СО 00
Ј
Манипулятор работает следующим образом.
В исходном положении шарнирно-ры- чажная рука 5 находится в горизонтальном положении. Дополнительный рычаг 14 также находится в горизонтальном положении. Вертикальная ось захвата 6 совпадает с осью подвесного толкающего конвейера 16.
После остановки подвески 17 с грузом 18 на подвесном толкающем конвейере 16 включается привод перемещения 4 каретки 3. Гибкие тяговые органы 15 поднимают шарнирно-рычажную руку 5 с захватом 6.
Груз 18 с подвески 17 перекладывается на захват 6, который продолжает подниматься. Когда груз 18 поднимается над опорной поверхностью подвески 17 на требуемую величину, привод перемещения 4 каретки 3 выключается.
Затем включается привод перемещения 10 манипулятора и манипулятор, выводя груз 18 из зоны подвески 17, перемещается по направляющим 8 в крайнее правое положение. После выключения привода перемещения ходовой каретки 7 и остановки манипулятора включается привод перемещения 4 каретки 3 на опускание груза 18 на сборочный конвейер 19 с одновременным включением привода перемещения ходовой каретки 7 на сопровождение конвейера 19.
Строго вертикальное перемещение захвата 6 с грузом 18 обеспечивается вращением дополнительных рычагов 14 шарнирно-рычажной руки 5 вокруг стационарных опор 13. При опускании захвата 6 из верхнего положения в среднее точка соединения дополнительного рычага 14 с верхним основным параллельным рычагом параллелограмма движется по дуге окружности вниз, радиус которого равен длине дополнительного рычага 14, а каретка 3 перемещается слева направо по направляющим основания 1. Перемещение каретки 3 компенсирует изменение длины горизонтальной проекции основных рычагов 11 параллелограммов в верхнем положении и их
длины в среднем горизонтальном положении.
При дальнейшем опускании захвата 6 с грузом 18 каретка 3 перемещается влево.
Таким образом достигается перемещение груза 18 без его отклонений в вертикальной плоскости.
После установки груза 18 на сборочный конвейер 19 захват 6 опускается ниже уров0 ня груза 18. Привод перемещения 4 каретки 3 выключается и включается привод перемещения ходовой каретки 7, и манипулятор перемещается вправо, выводя захват 6 из- под груза 18. Привод перемещения ходовой
5 каретки 7 выключается и включается привод перемещения 4 каретки 3 на подъем захвата 6 до исходного положения. Привод перемещения 4 каретки 3 выключается и включается привод перемещения ходовой каретки 7,
0 и манипулятор перемещается влево до исходного положения. После остановки очередной подвески 17с грузом 18 подвесного толкающего конвейера 16 цикл работы манипулятора повторяется.
5Формула изобретения
Манипулятор, содержащий основание с направляющими, установленную на них каретку с приводом ее перемещения и шарнирно-рычажную руку с захватом, о т л и ч а0 ю щ и и с я тем, что, с целью расширения технологических возможностей за счет обеспечения работы с подвесными и сборочными конвейерами, а также повышения надежности, шарнирно-рычажная рука выполнена в виде поперечины, двух пар основ- ных параллельных рычагов и двух дополнительных рычагов, причем каждая пара основных параллельных рычагов своими концами связана соответственно с за0 хватом и с кареткой, образуя параллелограммы, соединенные между собой поперечиной, а их плоскости параллельны между собой, при этом каждый из дополнительных рычагов связан с основа5 нием и со средней частью одного из рычагов соответствующей пары основных параллельных рычагов.
, 9 to. г 7

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1983 |
|
SU1133193A1 |
| Подвесной ковейер | 1979 |
|
SU800043A1 |
| УСТАНОВКА ДЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОЙ ОЧИСТКИ ОТЛИВОК | 1984 |
|
SU1236664A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ И ТРАНСПОРТИРОВАНИЯ ИЗДЕЛИЙ | 1992 |
|
RU2049710C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Подвесной толкающий конвейер-склад | 1960 |
|
SU135824A1 |
| Установка для подачи стержней | 1980 |
|
SU950480A1 |
| Подвеска подвесного толкающего конвейера | 1977 |
|
SU673549A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ДЛЯ СБОРКИ И СВАРКИ КУЗОВОВ АВТОМОБИЛЕЙ | 1995 |
|
RU2102210C1 |
Использование: автоматизация процесса перегрузки изделий с одного конвейера на другой. Сущность изобретения: манипулятор содержит основание 1 с направляющими, каретку 3, установленную на направляющих основания 1, привод перемещения 4 каретки 3, а также шарнирно-оычажную руку 5 с захватом 6, выполненную в виде двух пар основных параллельных рычагов 11, каждая из которых шарнирно связана соответственно с захватом 6 и кареткой 3, образуя параллелограммы, плоскости которых параллельны. Причем нижние основные рычаги 11 каждой пары соединены между собой поперечиной, а средние части верхних основных рычагов каждой пары соединены с основанием 1 посредством дополнительных рычагов 14. 2 ил.
| Манипулятор | 1983 |
|
SU1206077A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
