Г7
/« / /
/
II / f/-7 .
ЛКЦ ,/
с $
Я
a
i Изобретение относится к машиностроению, а именно к манипуляторам, : и может быть использовано для подачи I листовых заготовок в рабочую зону I пресса.
; Цель изобретения - упрощение кон- струкции при одновременном обеспече- НИИ горизонтального и вертикального перемещений руки.
На чертеже представлено предлага- Iемое устройство.
Манипулятор состоит из основания 1, кронштейна 2, на котором установлен силовой цилиндр 3 привода линейного перемещения. На кронштейне 4 основания 1 закреплен магазин 5, I снабженный механизмом 6 шаговой подачи деталей 7. На штоке 8 i pa 3 привода линейного перемещения iмежду регулируемыми упорами 9 и 10, jвыполненными в виде клеммных зажимов ;установлена каретка 11 с возможность j осевого перемещения по штоку 8 и Ползун 12. Между кареткой И и пол- Iзуном 12 установлена пружина 13 сжа |тия. В каретке 11 жестко закреплена I параллельно оси штока 8 штанга 14, |которля свободно входит в направляю- |щее отверстие передней крьшяки 15 си- |лового цилиндра 3. Штанга 14 снабжена упорами 16, 17, выполненными аналогично упорам 9, 10. Ползун 12 и ме ханическая рука 18 образуют с рыча- |гами 19 и 20 параллелограммный меха- | низм, причем рычаг 19 в середине свя |зан через шарнир 21 с кареткой 11 .посредством одного плеча двуплечего {рычага 22, второе плечо которого име |ет возможность взаимодействия с упо- ipoM 9. Для захвата деталей 7 на руке 18 закреплено захватное устройство 23
С целью обеспечения возможности строго вертикального перемещения руки 18 длины рычагов 19, 20 равны между собой, а длина плеча рычага 22 между кареткой 11 и шарниром 21 равна половине длины рычагов 19, 20,
г
Манипулятор работает следующим образом.
В исходном положении рука 18 с захватным устройством 23 находится над магазином 5 с деталями 7. При этом упор 16 упирается в переднюю крышку 15 силового цилиндра 3, а ползун 12 удерживается в крайнем пра вон положении пружиной 13. Рука 18 с захватным устройством 23 при этом поднята над деталями.7.
10
15
20
25
30
35
40
45
,
50
55
При подаче давления в штоковую полость силового цилиндра 3 шток 8 продвигается влево и упором 10 давит на ползун 12, заставляя его смещаться. Поскольку ограниченное упором 16 перемещение штанги 14 в этом направ лении невозможно, остается неподвижной и каретка 11, при .этом рычаги 19, 20 параллелограммного механизма поворачиваются и рука 18 с захватным устройством 23 опускается и захватывает верхнюю деталь 7.
По сигналу СУ подается давление в поршневую полость силового цилиндра 3. При этом шток 8 перемещается вправо, упор 10 освобождает ползун 12, который под действием пр жиаы 12i перемещается вправо и приводит в действие рычаги 19 и 20 параллелограммного механизма, которые поднимают руку 18 с захватным устройством 23 и деталью 7. В это время каретка 11 остается неподвижной, т.к. она поджата пружиной 13, и через штангу 14, упор 16 упирается в переднюю крышку 15 силового цилиндра 3, поэтому подъем руки 18 остается строго вертикальным. Подъем руки происходит до тех пор, пока поворот двуплечего рычага 22, взаимодействующего через шарнир 21 с рычагом 19, не будет ограничен упором 9.Шток 8 начинает перемещать вправо поднятую вверх руку 18 с деталью 7. Перемещение .руки 18 происходит до тех пор, пока упор 17 не войдет в контакт с передней крьш1кой 15 силового цилиндра 3 и через штангу 14 не остановит каретку 11. При дальнейшем перемещении штока 8, при остановленной каретке 11, упор 9 поворачивает двуплечий /рычаг 22 и через шарнир 21 воздействует на. рычаг 22 параллелограммного механизма, перемещая ползун 12 влево и сжимая пружину 13, при этом рука 18 с захватным устройством 23 бпускается и укладывает деталь 7 на рабочую позицию.
По сигналу СУ захватное устройство 23 освобождает деталь 7, механизм 6 пошаговой подачи подает детали в магазине 5 на один шаг, выводя верхнюю деталь 7 на позицию съеыа. Поршневая полость силового цилиндра 3 соединяется со сливной магистралью, а в штоковую полость подается давление. При этом шток 8 перемещается влево, увлекая за собой упор 9, кото314
рый освобождает двуплечий рычаг 22 и под действием пружины 13 поднимает руку 18 до тех пор, пока ползун 12 не войдет в контакт с упором 10, рука 18 в поднятом состоянии перемещается влево.
Цикл повторяется до тех пор,пока не будут изъяты все детали 7 из мага
что, с целью упрощения конструкции при одновременном обеспечении горизонтального и вертикального перемещений руки, он снабжен свободно расположенным на штоке ползуном, подпружиненным относительно каретки, и двумя рычагами, образующими совместно с рукой и с ползуном шарнирный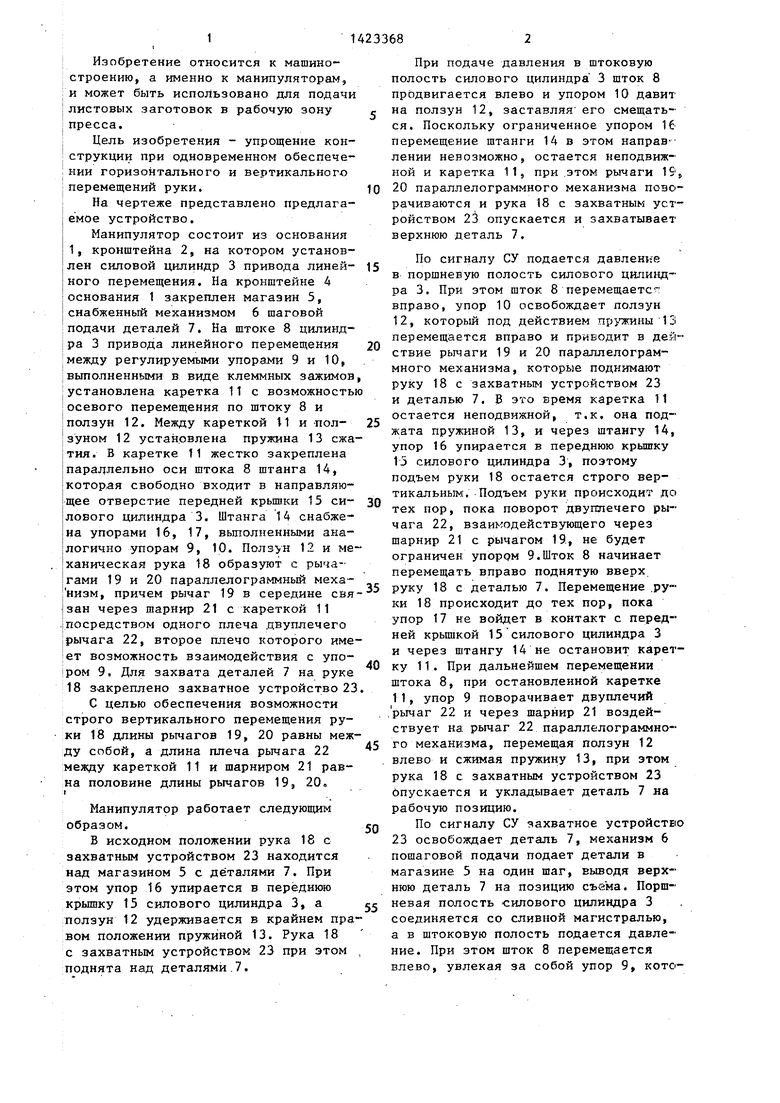
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1207754A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для подачи заготовок в зону обработки | 1986 |
|
SU1398961A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Роторный автомат питания | 1987 |
|
SU1516305A1 |
Изобретение относится к машиностроению, в частности к робототехнике. Цель изобретения - упрощение конструкции при одновременном обеспече- НИИ горизонтального и вертикального перемещений руки. При осевом перемещении каретки 11 и ползуна 12, кинематически связанных мезиду собой и расположенных на штоке 8 силового цилиндра 3, за счет того что рука 18 и рычаги 20 образуют параллелограм- мный механизм, происходят последовательные вертикальное, затем горизонтальное перемещения руки 18. Последовательность и величины перемещений зависят от положения регулируемых упоров 9 и 10 на Щтоке 8. 1 ил.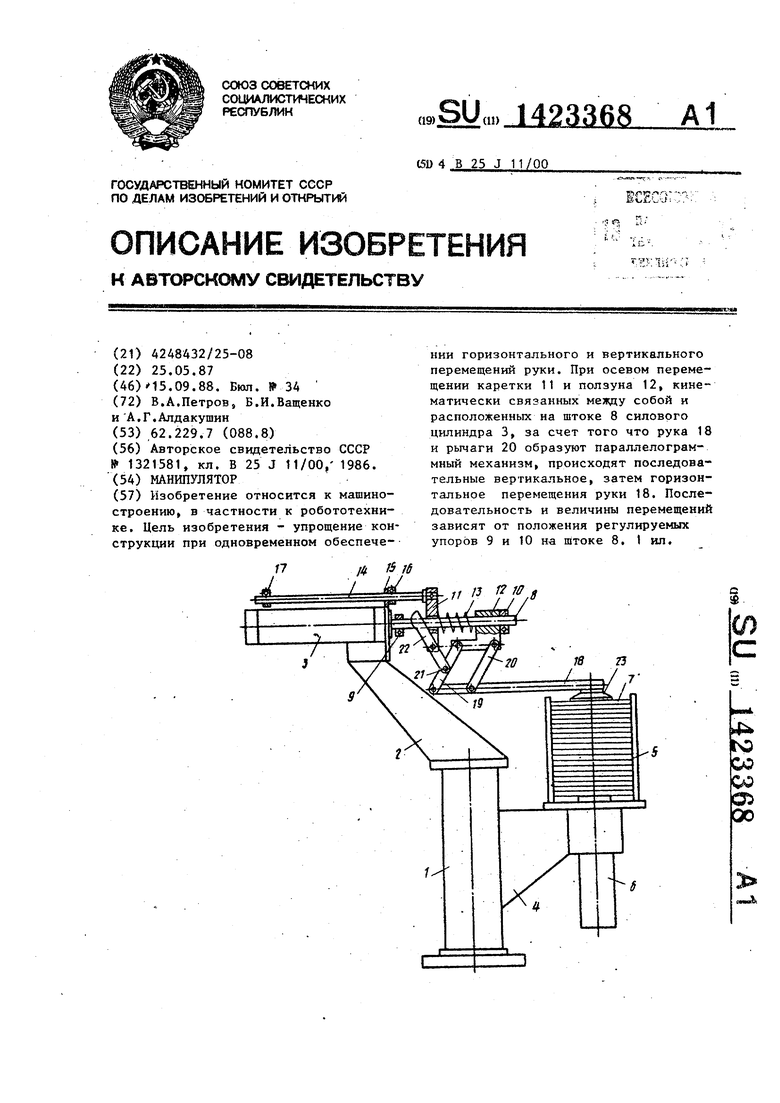
зина 5. С рабочей позиции детали уда- ю параллелограммный механизм, а регули- ляются или другим манипулятором, или руемые упоры установлены на штоке воздухом,силового цилиндра с двух сторон отноФормула изобретения сительно ползуна, при. этом последний
кинематически связан с кареткой посМанипулятор, содержащий основание, 5 редством дополнительного двуплечего
рычага, одно плечо которого шарнирно установлено в середине одного рычага
установленную на нем руку с захватным устройством, снабженную приводом, имеющим силовой цилиндр, каретку, жестко связанную сО штангой, расположенной параллельно продольной оси си- 2о ловрго цилиндрау и регулируемые упоры, отличающийся тем.
шарнирного параллелограммного механизма, его ось вращения - на каретке, а другое плечо имеет возможность взаимодействия с одним из регулируемых упоров.
шарнирного параллелограммного механизма, его ось вращения - на каретке, а другое плечо имеет возможность взаимодействия с одним из регулируемых упоров.
| Манипулятор | 1986 |
|
SU1321581A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
