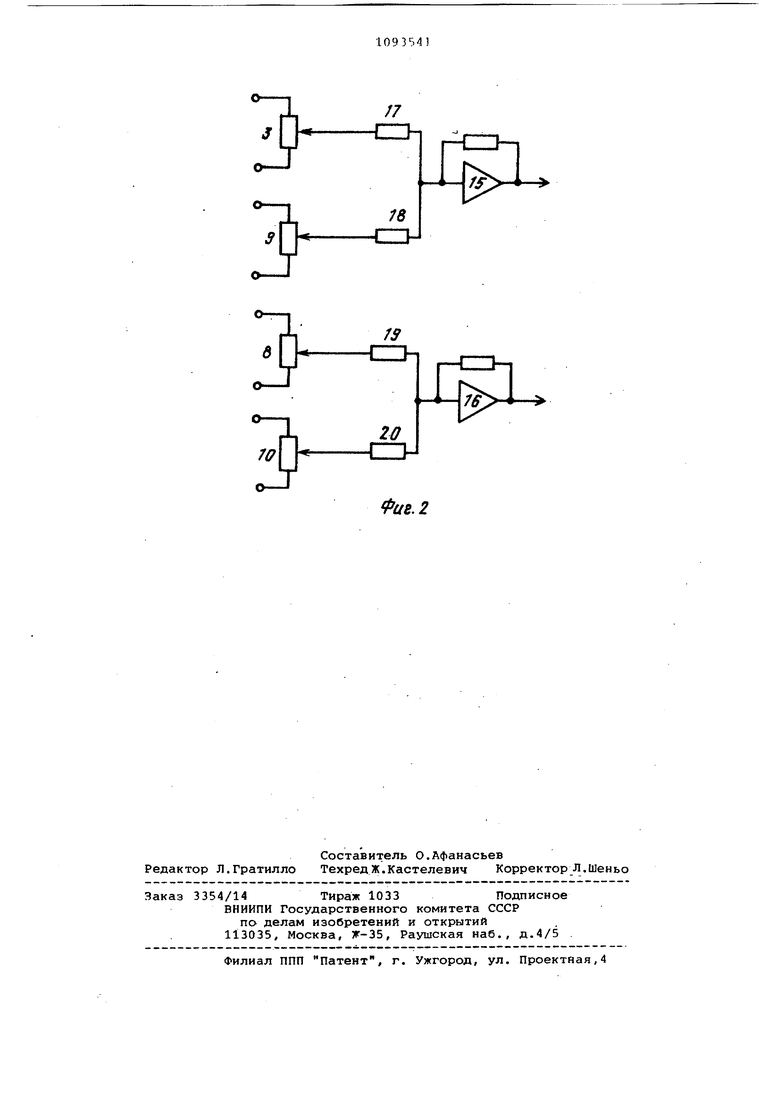
Изобретение относится к робототехнике для дистанционного управления манипуляторами, предназначенными в частности, для работы в экспериментальных условиях. Известно устройство для управления манипулятором, содержащее две основные связанные между собой коор динатные, внешнюю и внутреннюю, ор|тогональные .каретки, соединенные с входами основных датчиков линейных перемещений, и рукоятку управления, размещенную на внутренней каретке 1 Недостатком известного устройства является малая точность и скорость управления манипулятором. Целью изобретения является повышение точности управления. Цель достигается тем, что устройство для управления манипулятором, содержащее две основные связанные между собой координатные, внеинюю и внутреннюю, ортогональные каретки, соединенные с входами основных датчиков линейных перемещений, и рукоятку управления, размещенную на внутренней каретке, снабжено двумя логическими усилителями и двумя дополнительными координатными каретками, попарно совмещенными с основными ортогональными каретками и связанными с входами дополнительных датчиков линейных перемещений, а выходы каждой пары датчиков линей ных перемещений соединены с суммиру ющими входами каждого из логических усилителей, причем выходы пары датчиков линейных перемещений основных кареток подключены соответственно к одному из входов каждого из логических усилителей, а выходы пары датчиков линейных перемещений допол нительных кареток подключены к друг му входу каждого из логических усилителей. На фиг. 1 показана кинематическа схема устройства; на фиг. 2 - схема суммирования сигналов датчиков лине ного перемещения с помощью логического операционного ) усилителя. Устройство включает основание 1 с направляющими для перемещения одной из дополнительных кареток 2. На основании 1 закреплен потенциометрический датчик 3, подвижный кон такт 4 которого размещен на дополнительной каретке 2. Дополнительная каретка 2 содержит направляющие для перемещения второй дополнительной каретки 5. Вторая дополнительна каретка 5 содержит направляющие для перемещения первой основной каретки 6. Первая основная каретка 6 в свою очередь содержит направляющие для перемещения второй основной каретки 7. На направляющих дополнительны кареток 2 и 5 и основной каретки 6 закреплены потенциометрические датчики 8-10, подвижные контакты 1113 которых связаны с соответствующими каретками 5-7. На основной каретке 7 размещена рукоятка 14 управления. Дополнительные каретки 2 и 5 выполнены подторможенными. Торможение кареток выполнено, например, с помощью пружин, поджимающих каретки к соответствующим .направляющим (не показаны). Кроме того, устройство содержит два логических (операционных усилителя 15 и 16, каждый из которых с двумя входами 17 и 18 , 19 и 20. Входы 17 и 19 соответствуют большому коэффициенту усиления, а входы 18 и 20 - малому коэффициенту усиления. Устройство работает следующим образом. Выходные сигналы датчиков 3 и 9 одной координаты подаются на .сумМирующий (операционный) усилитель 15 (соответственно входы 17 и 18J. Аналогично датчики 8 и 10 другой координаты подключены к логическому (операционному J усилителю16 (соответственно входы 19 и 20 ). При этом выходы датчиков 3 и 8 перемещений подторможенных кареток соединены с входами 17 и 19 (операционныхJ усилителей 15 и 16 с наибольшими коэффициентами усиления. Выходы датчиков 9 и 10 перемещений кареток 6 и 7 подключены к входам 18 и 20 усилителей 15 и 16 с наименьшими коэффициентами усиления. Оператор воздействует на рукоятку 14 управления. При этом в силу того, что дополнительные каретки 2 и 5 выполнены подторможенными, двигаются в первую очередь основные каретки 6 и 7. Сигналы, снимаемые с датчиков 9 и 10 линейных перемещений, поступают на входы 18 и 20 усилителей 15 и 16 с наименьшими коэффициентами усиления. При этом исполнительный орган манипулятора совершает малые перемещения, что обеспечивает высокую точность выполняемой операции перемещения. Когда основные каретки 6 и 7 дойдут до крайних положений и станут в упор, начнут передвигаться дополнительные каретки 2 и 5. Сигналы, снимаемые с датчиков 3 и 8, поступают на входы 17 и 19 усилителей 15 и 16 с наибольшими коэффициентами усиления, где они суммируются с сигналами, поступающими с датчиков 9 и 10 соответственно. При этом исполнительный орган манипулятора совершает макроперемещения, что обеспечивает скорость перехода от одной точки рабочего пространства к другой.При необходимости точного управления оператор выводит основные каретки 6 и 7 из упора Предлагаемое устройство позволяв-: повысить точность и скорость управления манипулятора.
/7 -dh
JSl
CZJ-J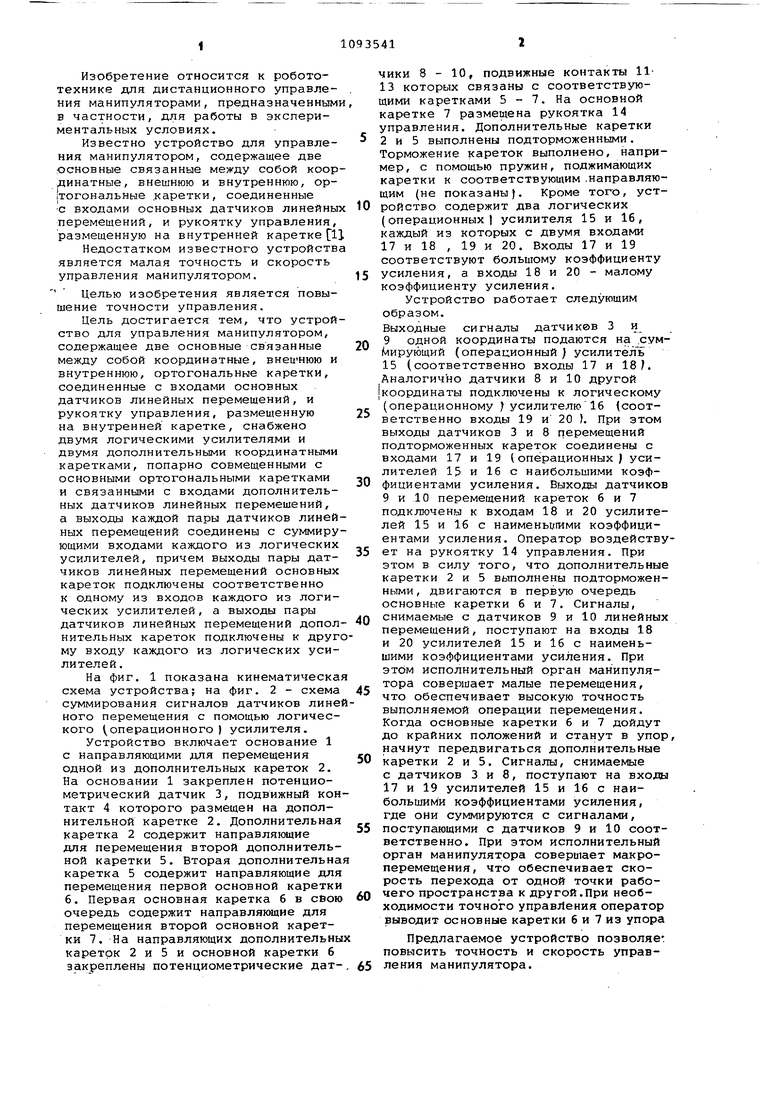
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство дистанционного полуавтоматического манипулятора | 1986 |
|
SU1705066A1 |
| Задающее устройство манипулятора | 1985 |
|
SU1757874A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| Универсальный картографический аппарат | 1960 |
|
SU147203A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1985 |
|
SU1247937A2 |
| РОБОТИЗИРОВАННЫЙ ИНФОРМАЦИОННО-ТЕХНОЛОГИЧЕСКИЙ МОДУЛЬ ДЛЯ ПРОИЗВОДСТВА ПРОВОЛОКИ В МОТКАХ | 2011 |
|
RU2497619C2 |
| Гидроэлектрическое устройство для измерения ширины сляба | 1981 |
|
SU1021942A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 1999 |
|
RU2168201C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее две основные связанные между собой координатные, внешнюю и внутреннюю, ортогональные каретки, соединенные с входами основных датчиков линейных перемещений, и рукоятку управления, размещенную на внутренней каретке, ч отличающееся тем, что,с целью повышения точности управления, оно снабжено двумя логическими усилителями-и двумя дополнительными к оординатными каретками, попарно совмещенными с основными ортогональными каретками и связанными с входами дополнительных датчиков линейных перемещений, а выходы каждой пары датчиков линейных перемещений соединены с суммирующими, входами каждого из логических усилителей, причем выходы пары датчиков линейных перемещений основных кареток подключены соответственно к одному из входов каждого из логических усилителей,а выходы пары датчиков линейных перемещений дополнительных кареток подсл ключены к другому входу каждого из логических усилителей. // со со СП 4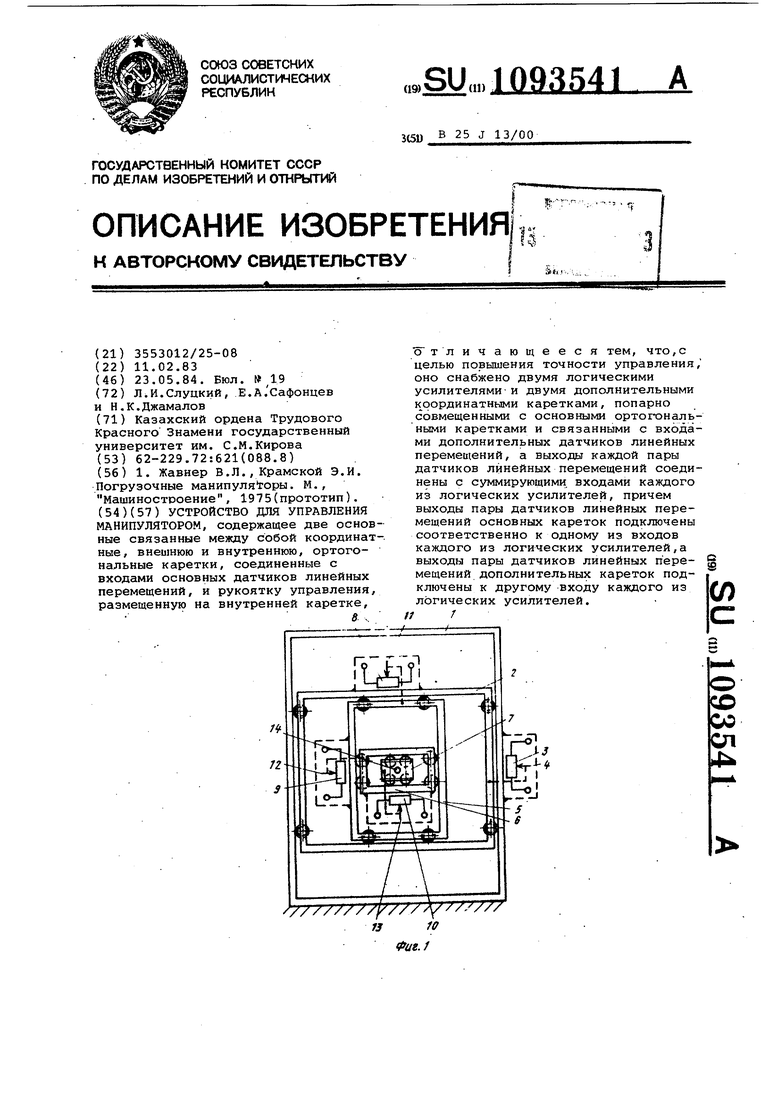
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Жавнер В.Л., Крамской Э.И | |||
| Погрузочные манипулягоры | |||
| М | |||
| , Машиностроение, 1975(прототип) | |||
