20
Os
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки бутылок в контейнеры | 1983 |
|
SU1088998A1 |
| Устройство для укладки бутылок в контейнеры | 1986 |
|
SU1353690A2 |
| Устройство для укладки бутылок в контейнеры | 1987 |
|
SU1493545A1 |
| Линия погрузки стеклотары в контейнер | 1989 |
|
SU1742175A1 |
| Устройство для укладки и извлечения бутылок из тары | 1986 |
|
SU1355551A1 |
| Устройство для укладки и извлечения бутылок из контейнера | 1984 |
|
SU1211155A1 |
| Устройство для укладки и извлечения бутылок из тары | 1986 |
|
SU1406036A1 |
| Устройство для выгрузки бутылок из контейнера | 1981 |
|
SU1000351A1 |
| Устройство для укладки штучных изделий в тару | 1989 |
|
SU1685798A1 |
| Способ укладки штучных изделий в пакет и транспортная линия для его осуществления | 1978 |
|
SU887387A1 |
Изобретение относится к пищевой и медицинской отраслям промышленности, в частности к упаковочному оборудованию, и может быть использовано для укладки бутылок в конвейеры. Цель изобретения - упрощение конструкции и повышение надежности. Устройство, содержащее механизм захвата и переноса бутылок в контейнер, снабжено механизмом ориентации контейнеров относительно захватной головки 8, состоящим из рамы 13, смонтированных на ней кулачков 14 с роликами и шарнирно установленных с возможностью взаимодействия с роликом подпружиненных изогнутых пластин. Приспособление для подачи прокладок содержит смонтированный с возможностью вертикального перемещения в направляющих 18 захватный орган 19, жестко соединенный с кронштейном 7, на котором установлена захватная головка 8 механизма захвата и переноса бутылок в контейнер. 1 з.п. ф-лы, 4 ил.
20- 5 -.
у
74
4J
00 00
я , Т
20 «
гг 3
1 Е
Т
Изобретение относится к пищевой и медицинской промышленности, в частности к упаковочному оборудованию, и может быть использовано для укладки бутылок в контейнеры.
Цель изобретения - упрощение конструкции и повышение надежности.
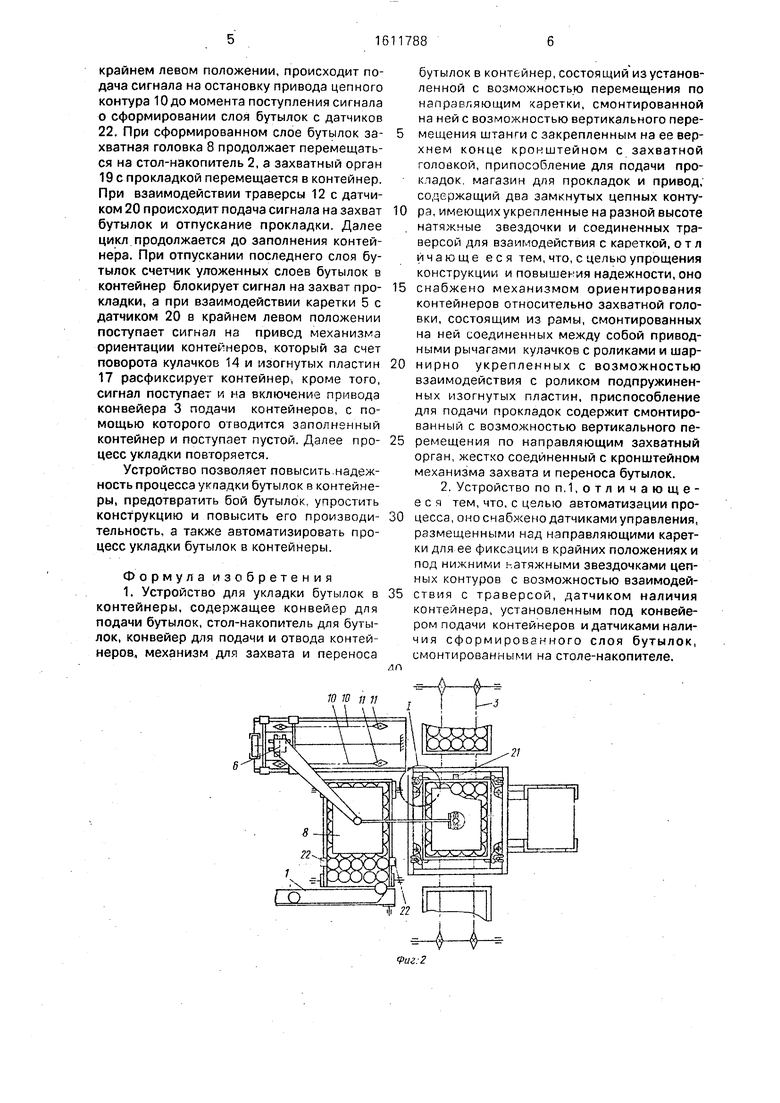
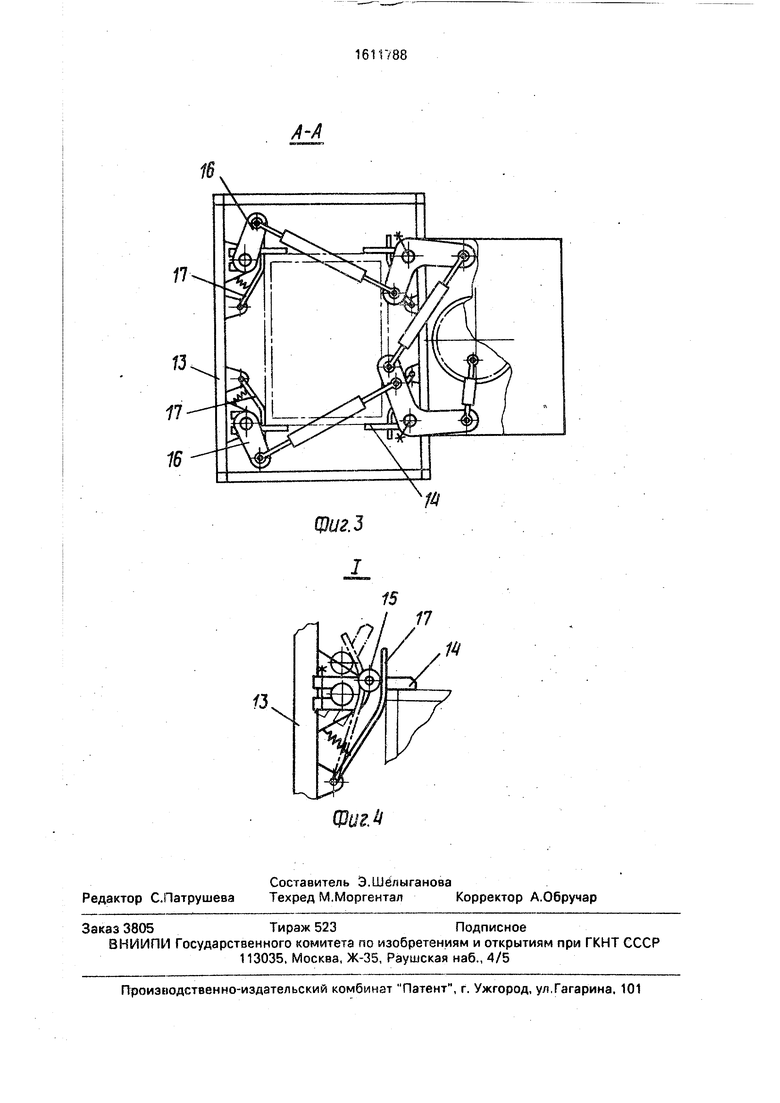
На фиг, 1 изображено устройство для укладки бутылок, общий вид; на фиг 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг.1; на фиг. 4 - узел I на фиг. 2.
Устройство для укладки бутылок в контейнеры содержит конвейер 1 для подачи бутылок, стол-накопитель 2 для бутылок, конвейер 3 для подачи и отвода контейнеров, механизм для захвата и переноса буты- лок в контейнер, состоящий из установленной с возможностью перемещения по направляющим 4 каретки 5, смонти- рованной на ней с возможностью вертикального перемещения штанги 6 с закрепленным на ее верхнем конце кронштейном 7 с захватной головкой 8.
Устройство содержит также приспособление для подачи прокладок, магазин 9 для прокладок и привод. Привод содержит два замкнутых 1|епных контура 10, имеющих укрепленные на разной высоте натяжные звездочки 11, соединенные траверсой 12 для взаимодействия с кареткой 5.
Устройство снабжено механизмом ори- ентироваи$«1я контейнеров относительно захватной головки 8, состоящим из рамы 13, смонтированных на ней кулачков 14с роликами 15, со€. диненных между собой привод- рычагами 16, и шарнирно укрепленных с возможностью взаимодействия с роликом 15 подпружиненных изогнутых пластин 17.
Приспособление для подачи прокладок содержит смонтированный с возможностью вертикального перемещения по направляющим 18 захватный орган 19, жестко соединенный с кронштейном 7 механизма захвата и переноса бутылок в контейнер.
Для автоматизации процесса укладки бутылок устройство может быть снабжено датчиками 20 управления, размещенными над нап|эавдяющими 4 каретки 5 для ее фиксации в кра1)них положениях и под нижними натяжными звездочками 11 цепных контуров 10 с возможностью взаимодействия с траверсой 12. Под конвейером 3 для подами контейнеров могут быть установлены датчики 21 наличия контейнера, а на столе-накопителе 2 могут быть установлены датчики 22 наличия слоя бутылок.
Устройство работает следующим образом.
В исходной позиции каретка 5 механизма захвата и переноса бутылок находится в крайнем левом положении, механизм ориентации контейнеров относительно захват- 5 ной головки находится в раскрытом положении с возможностью свободного прохода контейнера. При сформировании на столе-накопителе 2 слоя бутылок с заданным количеством и раскладкой - равным по
0 периметру пространству контейнера, срабатывают датчики 22, которые дают сигнал на остановку стола-накопителя 2, включение привода цепных контуров 10, и конвейера 3 подачи контейнеров. При движении
5 траверсы 12 вниз захватная головка 8 опускается на сформированный стол бутылок, а при взаимодействии траверсы 12 с датчиком 20 происходит подача сигнала на захват бутылок. Далее процесс перемещения за0 хватной головки продолжается, и каретка 5 при этом перемещается вправо, взаимодействуя в крайнем правом положении с датчиком 22, и в случае отсутствия контейнера в механизме ориентации (нет сигнала с датчи5 ка 21) происходит остановка привода цепного контура 10.
При взаимодействии контейнера, поступающего по конвейеру 3, с датчиком 21, последний дает сигнал на остановку конвей0 ера и включение привода механизма ориентации контейнеров, в результате чего происходит поворот кулачков 14, а с помощью роликов 15 и подпружиненных изогнутых пластин 17, осуществляется
5 ориентация контейнера с зажимом и фиксацией его с охватыванием снаружи. Кроме того, при срабатывании датчика 21 сигнал поступает и на включение привода цепного контура 10, в результате чего происходит
0 перемещение захватной головки 8 со слоем бутылок в контейнер, а захватный орган 19, приспособление подачи прокладок, перемещается при этом к магазину 9 для прокладок и соприкасается с прокладками. При взаи5 модействии траверсы 12 с датчиком 20 поступает сигнал на захват прокладки, отпускание слоя бутылок, и на счетчик уложенных слоев в контейнер. Далее траверса 12, перемещаясь на вертикальном участке
0 цепного контура 10, выводит захватную головку 8 из контейнера, а с помощью приспособления подачи прокладок происходит отделение одной прокладки. При перемещении на горизонтальном участке осуществля5 ется перемещение захватной головки 8 к столу-накопителю 2, а прокладки, удерживаемой с помощью захватного органа 19, - к контейнеру. В случае несформирования слоя бутылок на столе-накопителе, при взаимодействии каретки 5 с датчиком 20, в
крайнем левом положении, происходит подача сигнала на остановку привода цепного контура 10 до момента поступления сигнала о сформировании слоя бутылок с датчиков 22. При сформированном слое бутылок за- хватная головка 8 продолжает перемещаться на стол-накопитель 2, а захватный орган 19с прокладкой перемещается в контейнер. При взаимодействии траверсы 12с датчиком 20 происходит подача сигнала на захват бутылок и отпускание прокладки. Далее цикл продолжается до заполнения контейнера. При отпускании последнего слоя бутылок счетчик уложенных слоев бутылок в контейнер блокирует сигнал на захват про- кладки, а при взаимодействии каретки 5 с датчиком 20 в крайнем левом положении поступает сигнал на привод механизма ориентации контейнеров, который за счет поворота кулачков 14 и изогнутых пластин 17 расфиксирует контейнер, кроме того, сигнал поступает м на включение привода конвейера 3 подачи контейнеров, с помощью которого отводится заполненный контейнер и поступает пустой. Далее про- цесс укладки повторяется.
Устройство позволяет повысить.надежность процесса укпадки бутылок в контейнеры, предотвратить бой бутылок, упростить конструкцию и повысить его производи- тельность, а также автоматизировать процесс укладки бутылок в контейнеры.
Формула изобретения 1. Устройство для укладки бутылок в контейнеры, содержащее конвейер для подачи бутылок, стол-накопитель для бутылок, конвейер для подачи и отвода контейнеров, механизм для захвата и переноса
бутылок в контейнер, состоящий из установленной с возможностью перемещения по направляющим каретки, смонтированной на ней с возможностью вертикального перемещения штанги с закрепленным на ее верхнем конце кронштейном с захватной головкой, припособление для подачи прокладок, магазин для прокладок и привод; содержащий два замкнутых цепных контура, имеющих укрепленные на разной высоте натяжные звездочки и соединенных траверсой для взаимодействия с каоеткой, от л йчающе еся тем, что, с целью упрощения конструкции и повышения надежности, оно снабжено механизмом ориентирования контейнеров относительно захватной головки, состоящим из рамы, смонтированных на ней соединенных между собой приводными рычагами кулачков с роликами и шар- нирно укрепленных с возможностью взаимодействия с роликом подпружиненных изогнутых пластин, приспособление для подачи прокладок содержит смонтированный с возможностью вертикального перемещения по направляющим захватный орган, жестко соединенный с кронштейном механизма захвата и переноса бутылок.
16
Щи2.3
| Устройство для укладки бутылок в контейнеры | 1986 |
|
SU1353690A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
