Изобретение относится к агрегатам для обработки преимущественно футора нианино и позволяет повысить механизацию процессов калибровки футора, а также создать криволинейные поверхности на его обкладках и нижней обвязке. Достигается это тем, что агрегат включает имеющие, напри1мер, индивидуальный электропривод рабочие орга.ны для обработки боковых поверхностей футора, выполненные в виде двух вертикальных цилиндрических фрез; рабочие органы для обработки торцов футора, выполненные в виде укренленпых на каретке круглой пилы и дисковой фрезы; механизм для создания криволинейных поверхностей футора представляющий собой каретку, снабженную рабочим органом и установленную с возможностью перемещения в двух взаимно перпендикулярных направлениях по продольным и поперечным криволинейным направляющим, кривизна которых соответствует профилю обкладок и обвязки обрабатываемого футора, и платформу, перемещаемую по горизонтальным направляющим и фиксируемую в рабочем положении посредством пневматического захвата. На Платформе закрепляют футор.
Рабочий орган механизма для создания криволинейных поверхностей футора, выполненный в виде, например, торцовой фрезы, смонтирован на валу электродвигателя, закрепленного на штангах с возможностью перемещения по высоте для переточки фрезы без необходимости ее съема. Платформа для крепления футора снабжена поворотно-выдвижными траверс;1ыми пневмоприжимами и крюкообразным кронщтейном, взаимодействующим при фиксировании платформы в рабочем положении с пневматическим захвато.м, смонтированным на станине агрегата.
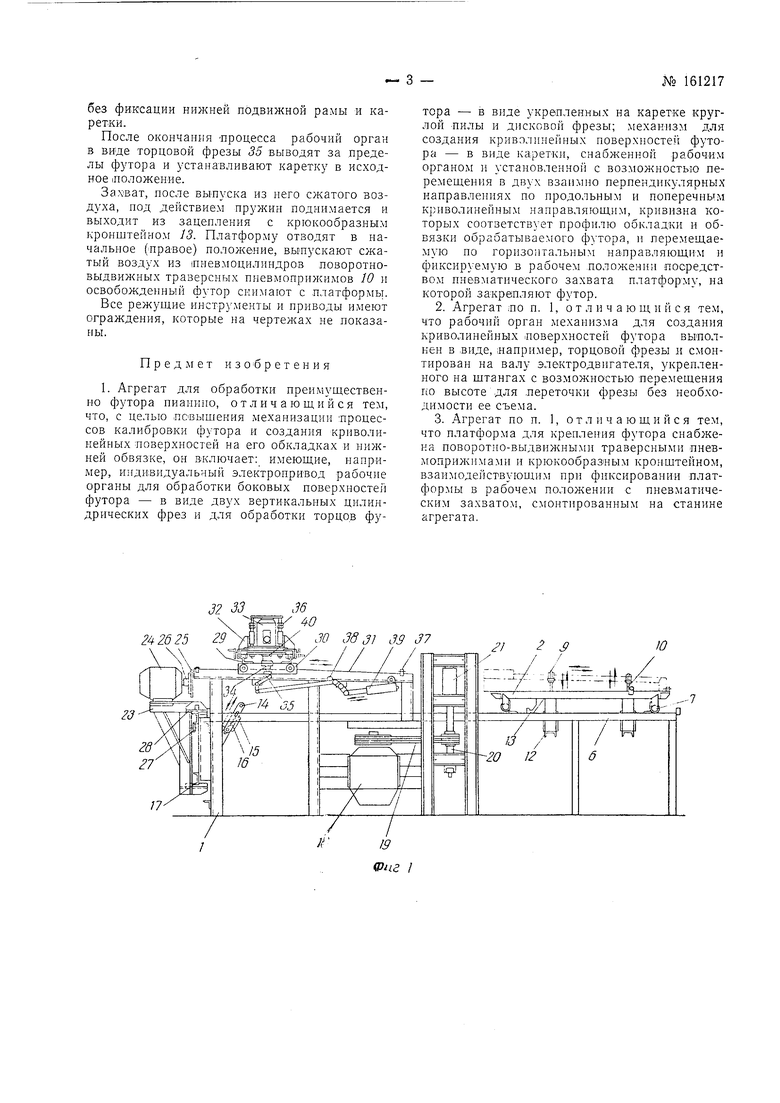
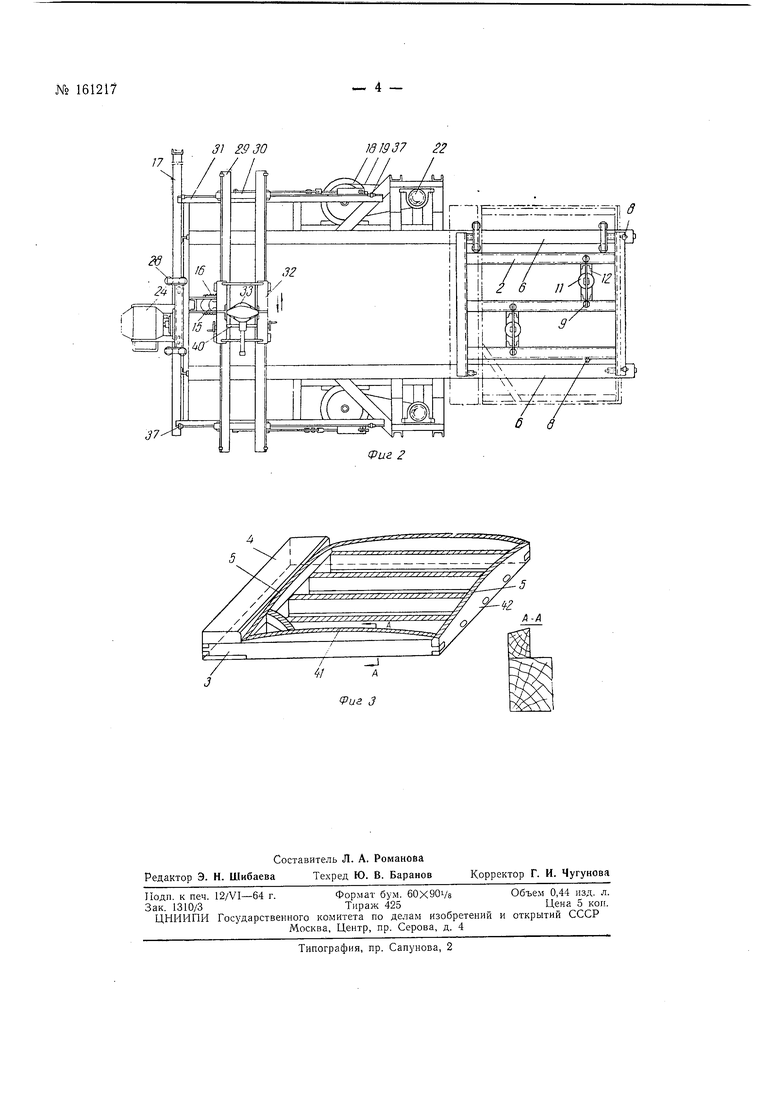
На фиг. 1 изображен агрегат для обработки футора ииаииио, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - футор пиаиино, подлежащий обработке.
Станина / представляет собой сварную конструкцию, выполненную, напрпмер, из стального сортового проката, на которой смонтированы четыре основных узла агрегата: платформа 2, рабочие органы для обработки боковых поверхностей 3, рабочие органы для обработки поверхности торца 4 и механизм для создания криволинейных поверхностей 5.
Для передвижения платформы в горизонтальном направлении служат направляющие 6, для Продольното 1Передщижен-ия - четыре ролИка 7. Для предотвращения боковых смещений платформы предусмотрены четыре горизонтальных ролика (на чертеже не показаны) .
В качестве базирующих элементов на платформе установлены три регулирующих упора 8. Для крепления футора платформа снабжена двумя Поворотно-выдвижными траверсными пневмоприжимами 9. Тяги 10 прил™мов лроходят через отверстия в полых щтоках порщней ппевмоцилиндров 11 (фиг. 2), закрепленных .на полеречинах 12 платформы. На платформе для ее фиксапии в конечном (левом) положении смонтирован крюлообразный кронштейн 13.
Фиксация платформы в конечном положении производится ппев.матическим захватом 14 (фиг. 1), .приводимым в действие пневмоцилиндром 15. Верхнее положение захвата в свободном (нерабочем) состоянии обеспечивается пружинами 16.
Рабочие органы для обработки боковых поверхностей футора, смонтированные па поперечных направляющих 17, состоят из индивидуальных электраприводов 18, которые приводят в движепие посредством клиноременных передач 19 вертикальпые шпиндели 20 с укрепленными на .них цилиндрическими фрезами 21.
В верхней части шпиндели закреплены съемными вращающимися центрамИ 22, позволяющими осуществлять быструю смепу цилиндрических фрез.
Рабочие органы для обработки поверхности торца футора состоят и каретки 23 с установленным на пей индивидуальным электроприводом 24, на валу которого укреплена круглая пила 25, СО опареиной с ней дисковой фрезой 26.
Для .движения по направляющим 6 и для предотвращения боковых и вертикальных смещений каретки 23 служат три вертикальных ролика 27 (два вверху и один внизу) и шесть горизонтальных роликов 28 (четыре на верхней .направляющей и два на нижней).
Механизм для создания криволинейных поверхностей футора состоит из нижней подвижной рамы, представляющей собой две поперечные криволинейные направляющие 29, закрепленные на двух бегунках 30, которые передвигаются по двум, неподвиж.но закрепленным на станине, продольным криволинейным направляющим 31.
По направляющим нижней рамы движется каретка 32 с вертикально установленны.м на ней индивидуальным электроприводом 33, па
валу 34 которого укреплен рабочий орган в виде торцовой фрезы 55.
Индивидуальный электропривод закреплен на щтангах 36, что позволяет регулировать его положение по высоте в связи с переточкой фрезы. Для обеспечения синхронного вращения передние ролики бегунков соединены меж.ду собой валиком (на чертеже не показан). Для ограничения бегунков на наПравляющИХ 31 установлены регулируемые упоры 37, изменение положения которых производится при наладке и по мере стачивания фрезы 55.
Фиксация бегунков в крайних положениях осуществляется прижима.ми 38, связанными системой рычагов (на чертеже не показаны) с пневмоцилиндрами 39. Фиксация каретки 32 в крайних положениях осуществляется винтовыми зажимами 40.
Процесс обработки футора пианино на агрегате происходит следующим образом.
В пачальном (правом) положении платформы на пее укладывают футор и закрепляют его в четырех точках поворотно-выдвижными траверсными пневмоприжимами 9.
После этого включают рабочие органы для обработки боковых поверхностей, платформа с футором подается вперед (влево) и проходит между цилиндрическими фрезами 21.
После прохождения цилиндрических фрез рабОЧие органы отключаются путевым выключателем. Чтобы избежать отколов, скорость подачп в начале и в конце фрезерования замедляется.
В конечном (левом) положении платформу жестко закрепляют опускающи.мся под действием -сжатого воздуха пневматическим захватом 14 и .производят обработку торца футора. При отходе каретки 23 рабочих органов для обработки торца от своего начального положения .путевыми выключателями производится автоматический пуск электропри.вода 24 круглой пилы 25 и дублирующее отключение электроприводов 18 рабочих органов для обработки боковых поверхностей.
При возврате каретки в исходное положение электропривод круглой пилы автоматически отключается.
После окончания процесса калибровки футора обрабатывают обКладки 4 и нижние обвязки 42 футора для создания па них криволинейных .поверхностей. При обработке верхней обкладки и нижней обвязки футора нижняя подвижная рама зафиксирована, а каретка 32 движется. При обработке левой и правой обкладок зафиксироваппая каретка движется вместе с пижней подвижной рамой и продольном направлении. Криволинейные поверхности левого угла футора обрабатывают
без фиксации нижней подвижной рамы и каретки.
После окончания процесса рабочий орган в виде торцовой фрезы «35 выводят за пределы фзтора и устанавливают каретку в исходное положение.
, после выпуска из него сжатого воздуха, нод действием нружин поднимается и выходит из зацепления с крюкообразным кронштейном 13. Платформу отводят в начальное (травое) положение, вы пускают сжатый воздух из лневмоцилиндров поворотновыдвижных траверсных пневмоприжимов 10 и освобожденный футор снимают с платформы.
Все режущие инстр)менты и приводы имеют ограждения, которые на чертежах не ноказаиы.
Пред.мет изобретения
1. Агрегат для обработки преимундественно футора пианино, отличающийся тем, что, с целью .повыщения механизации лроцессов калибровки футора и создания криволинейных новерхностей на его обкладках и нижней обвязке, он включает: имеющие, паиример, индивидуальный электропривод рабочие органы для обработки боковых поверхностей футора - в виде двух вертикальиых цилиндрических фрез и для обработки торцов футора - в виде укрепленных на каретке круглой пилы и дисковой фрезы; механизм для создания кривэл1П1ейных новерхностей футора - в виде каретки, снабженной рабочим органом и установленно с возможностью перемещения в двух взаимно перпендикулярных направлениях ио продольным и поперечным криволинейным направляющим, кривизна которых соответствует профилю обкладки и обвязки обрабатываемого футора, и перемещае.мую ио горизонтальным направляющим и фиксируемую в рабочем положении посредством иневматического захвата платфор.му, на которой закрепляют футор.
2.Агрегат ;по п. 1, отличающийся тем, что рабочий орган механизма для создания криволинейных поверхностей футора выполнен в Биде, яанри.мер, торцовой фрезы и смонтирован на валу электродвигателя, укрепленного на щтангах с возможностью пере.мещения по высоте для лереточки фрезы без необходимости ее съема.
3.Агрегат по п. 1, отличающийся тем, что платформа для крепления футора снабжена поворотно-выдвилсными траверсными пневмоприжимами и крюкообразным кронштейном, взаимодействующим при фиксироваиии платформы в рабочем положении с пневматическим захватом, смонтированным на станине агрегата.
J2 3336 W 0 242625 29 // 2
