Фиг. 7
Изобретение относится к управлению электрическими машинами и может быть использовано в многокоординатном дискретном электроприводе.
Цель изобретения - повышение быстродействия и экономичности привода и уменьшение погрешности воспроизведения заданного движения.
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - угловые характеристики шагового электропривода при регулировании амплитуды вектора момента (силы).
Устройство содержит последовательно соединенные цифровой сумматор 1, цифро- аналоговый преобразователь 2, усилитель 3 мощности, соединенный с фазами шагового двигателя 4, акселерометр 5, функциональный генератор 6 пробного сигнала, подключенный к входу аналого-цифрового преобразователя 7, избирательный усилитель 8, вход которого подключен к выходу акселерометра, перемножитель 9, подсоединенный своими входами к выходам функционального генератора пробного сигнала и избирательного усилителя, и интегратор 10, вход которого соединен с выходом перемножи- теля, а выход - с входом опорного напряжения цифроаналогового преобразователя.
Устройство работает следующим образом.
При отработке программного задания 11, поступающего через цифровой сумматор 1 на цифроаналоговый преобразователь 2, управляющий через усилитель 3 мощности шаговым двигателем 4, на якоре (роторе) которого установлен акселерометр 5, функциональным генератором 6 пробного сигнала че- рез аналого-цифровой преобразователь 7 осуществляется девиация программного .задания 11 с частотой, существенно превышающей частоту собственных колебаний привода. Сигнал ускорения с акселерометра 5 поступает через цепь обратной связи, образованную избирательным усилителем 8, выделяющим сигнал на частоте функционального генератора пробного сигнала перемножителем 9, осуществляющим перемножение сигналов с выходов избирательного усили- теля и функционального генератора пробного сигнала и интегратором 10, на вход (перемножающий) опорного напряжения цифроаналогового преобразователя 2.
При этом обеспечивается регулирование амплитуды вектора момента (силы) двига- теля и постоянство динамической ошибки
|Y-0| -|.
Принцип формирования сигнала обратной связи в канале регулирования ампли- туды вектора момента (силы) поясняется фиг. 2. Девиация программного задани55 Ду вызывает девиацию момента (силы) двигателя, а следовательно, и ускорения Ле При
а)IY-В| колебания Ду и Де син- фазны;
б)17-0l j имеют фазовый сдвиг,
равный ;
в) колебания AY и Ае про- тивофазны.
Результат перемножения сигналов - Ду и Де, подаваемый на вход интегратора, представляет в случаях а) отрицательный сигнал; б) знакопеременный сигнал; в) положительный сигнал. При этом выходной сигнал интегратора, осуществляющий регулирование амплитуды вектора момента (силы):
а) уменьщается, снижая момент (силу) двигателя и увеличивая динамическую ошибку;
в) сохраняет среднее значение неизменным, поддерживая неизменным момент (силу) двигателя и динамическую ошибку;
в) увеличивается, повышая момент (силу) двигателя и уменьшая динамическую ошибку.
Экспериментальное исследование электропривода на базе плоского шагового электродвигателя ХУ,-ШД-3, управляемого предлагаемым устройством, показало, что улучшается динамическое движение, при этом максимальная скорость движения повышается в 1,3/1,4 раза, достигая 0,78 мс (при величине полюсного деления двигателя 0,48 мм и постоянной времени цепи фазы 0,4 мс). Кроме того, в 1,2-1,3 раза снижается мощность, потребляемая электродвигателем.
Формула изобретения
Устройство для управления шаговым электродвигателем, содержащее последовательно соединенные аналого-цифровой преобразователь, цифровой сумматор, цифро- аналоговый преобразователь, усилитель мощности, соединенный с фазами шагового двигателя, и акселерометр, отличающееся тем, что, с целью повышения быстродействия, экономичности и уменьшения погрешности воспроизведения заданного движения, введены интегратор, перемножитель, избирательный усилитель и функциональный генератор пробного сигнала, подключенный к входу аналого-цифрового преобразователя, вход избирательного усилителя подключен к выходу акселерометра, перемножитель подсоединен своими входами к выходам , функционального генератора пробного сигнала и избирательного усилителя, вход интегратора соединен с выходом перемножителя, а выход - с входом опорного напряжения цифроаналогового преобразо- .

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Измеритель метеорологической дальности видимости | 1990 |
|
SU1784843A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Устройство для контроля дефектности полупроводниковых пластин и структур | 1990 |
|
SU1785054A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ КРИТЕРИЯ ВОСПЛАМЕНЯЮЩЕЙ СПОСОБНОСТИ ИСКРОВЫХ РАЗРЯДОВ В СВЕЧАХ ЗАЖИГАНИЯ | 2000 |
|
RU2182336C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |

Изобретение относится к электротехнике и может быть использовано в приборостроении, робототехнических системах, гибких автоматизированных производствах. Целью изобретения является повышение быстродействия и экономичности привода, уменьшение погрешности воспроизведения заданного движения. Устройство содержит последовательно соединенные аналого-цифровой преобразователь 7, цифровой сумматор 1, цифроаналоговый преобразователь 2, усилитель 3 мощности, соединенный с фазами шагового двигателя 4, акселерометр 5, функциональный генератор 6 пробного сигнала, избирательный усилитель 8, перемножитель 9. Устройство обеспечивает работу с максимально возможным углом коммутации. 2 ил.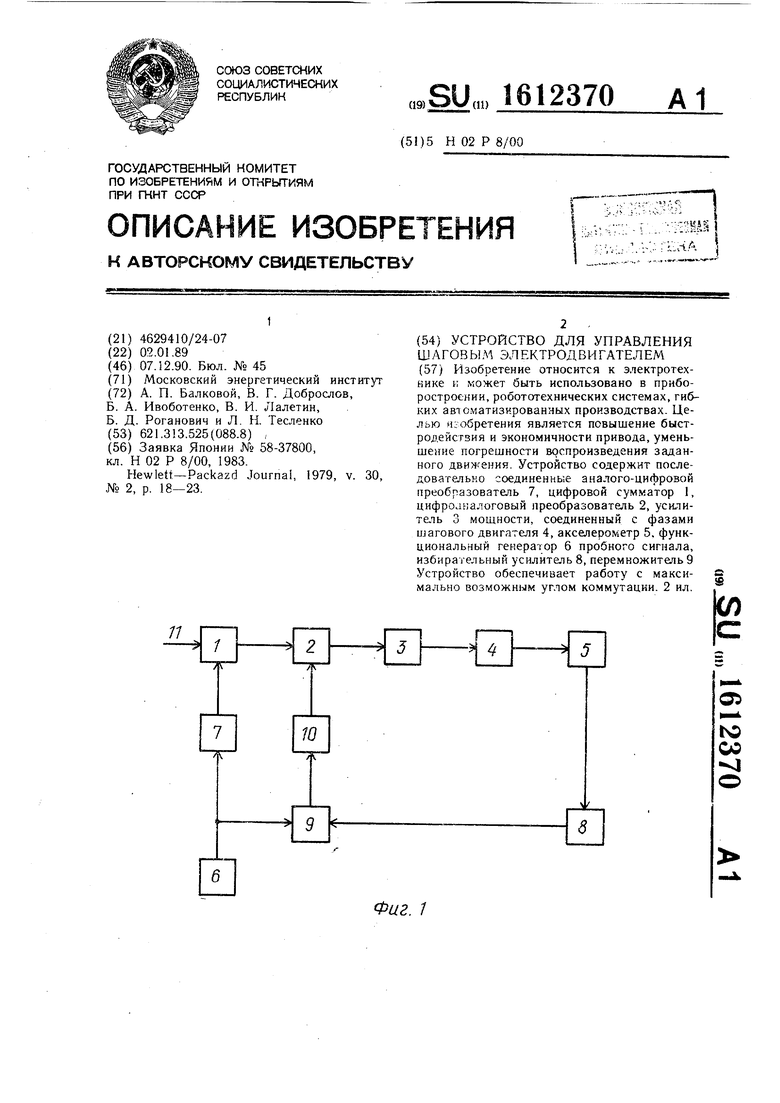
Фиг. 2
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Hewlett-Packazd Journal, 1979, v | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
