Фиг.1
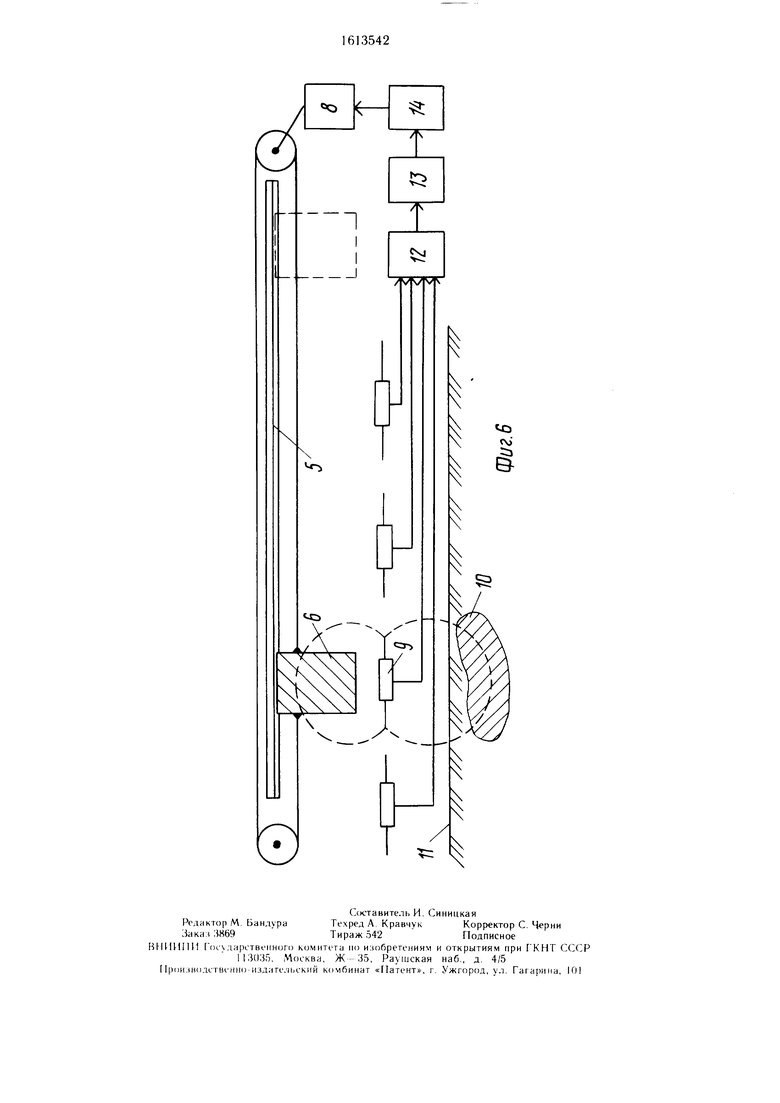
связанного с Г1 6 посредством гибкого тягового органа 7 и имеющего систему адресного управления. (истема адресного уг1)авления привода 8 выполнена в виде установленных на КР 2 датчиков 9 неодно- родностей К). Каждый датчик 9 с помощью коммутатора 12 поочередно подключается к усилителю 1:5, сблокированному с релейным адресным ме.хани:(мом 14, управляющим приводом 8 перемещения II 6. При
появлении неоднородностей П 6 начинает перемещаться по направляющим. Дойдя до зоны действия датчика, находящегося в районе неоднородности 10, П 6, имея больщую металогическую массу, воздействует на поле датчика. Таким образом П 6 останавливается в заданном месте и создает дополнительное давление тяговой цепи 3 с ковшами (рабочего органа) на поверхность забоя. I з.п.ф-лы, 6 ил.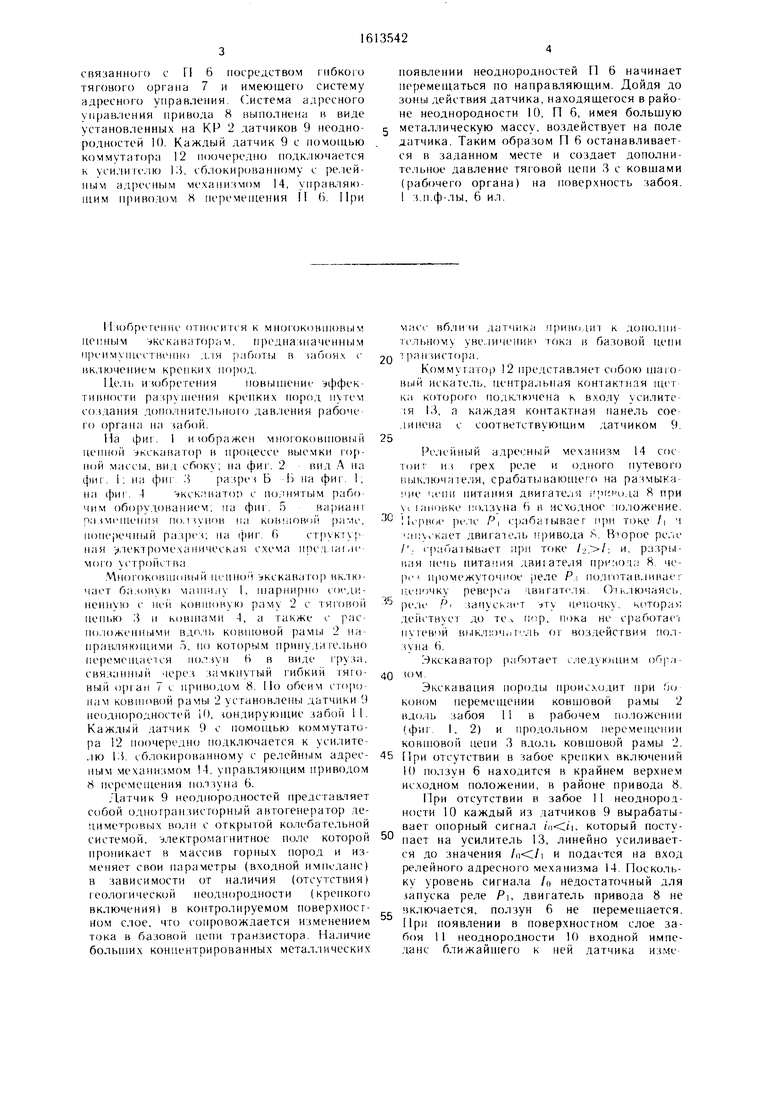
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган экскаватора | 1976 |
|
SU602649A1 |
| Многоковшовый цепной экскаватор поперечного копания | 1978 |
|
SU735708A1 |
| Многоковшовый экскаватор поперечного копания для рытья и очистки ирригационных каналов | 1961 |
|
SU142214A1 |
| Траншейный экскаватор | 1976 |
|
SU658237A1 |
| Стволовой породопогрузочный агрегат | 1986 |
|
SU1346801A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЦЕПНОГО МНОГОКОВШОВОГО ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1968 |
|
SU220862A1 |
| Землеройная машина | 1956 |
|
SU137833A1 |
| Многоковшовый цепной рабочий орган для очистки каналов | 1988 |
|
SU1544896A1 |
| Роторный траншейный экскаватор | 1980 |
|
SU941500A1 |
| Рабочий орган роторного экскаватора | 1988 |
|
SU1553613A1 |
Изобретение относится к многоковшовым цепным экскаваторам, предназначенным преимущественно для работы в забоях с включением крепких пород. Цель - повышение эффективности разрушения крепких пород путем создания дополнительного давления рабочего органа на забой. Многоковшовый цепной экскаватор включает базовую машину 1, шарнирно соединенную с ней ковшовую раму (КР) 2 с тяговой цепью 3 и ковшами 4. Вдоль КР 2 расположены направляющие 5, на которых с возможностью перемещения установлен ползун (П) 6 в виде груза. Механизм перемещения П 6 выполнен в виде привода 8, связанного с П 6 посредством гибкого тягового органа 7 и имеющего систему адресного управления. Система адресного управления привода 8 выполнена в виде установленных на КР 2 датчиков 9 неоднородностей 10. Каждый датчик 9 с помощью коммутатора 12 поочередно подключается к усилителю 13, сблокированному с релейным адресным механизмом 14, управляющим приводом 8 перемещения П 6. При появлении неоднородностей П 6 начинает перемещаться по направляющим. Дойдя до зоны действия датчика, находящегося в районе неоднородности 10, П 6, имея большую металлическую массу, воздействует на поле датчика. Таким образом П 6 останавливается в заданном месте и создает дополнительное давление тяговой цепи 3 с ковшами (рабочего органа) на поверхность забоя. 1 з.п. ф-лы, 6 ил.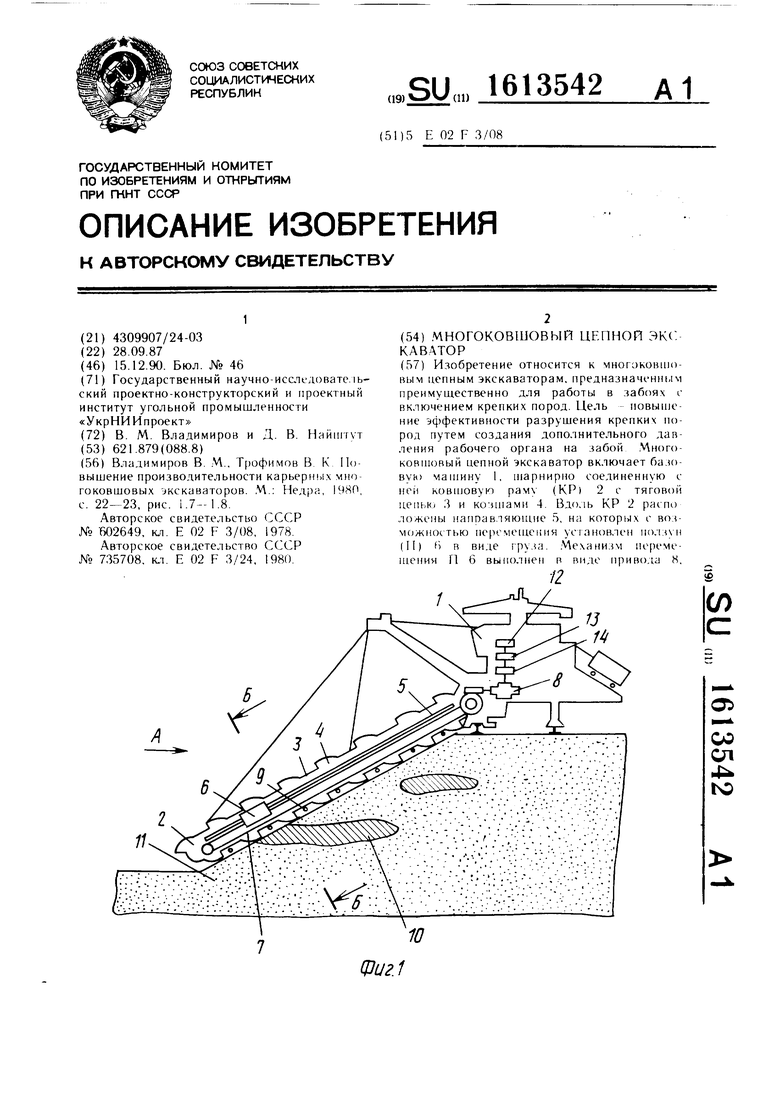
Изобретение относится к мног оконпюны м цепным -экскаваторам. предназначенШ)1м прс имупич твенно д. 1Я работы в чабоях с вк.чючением крепких пород.
Це,11) изобретения повышение :(})фек- тивности разрушения KfieiiKHX нород путем со.здания до 1олнительног() давления рабочего органа на забой.
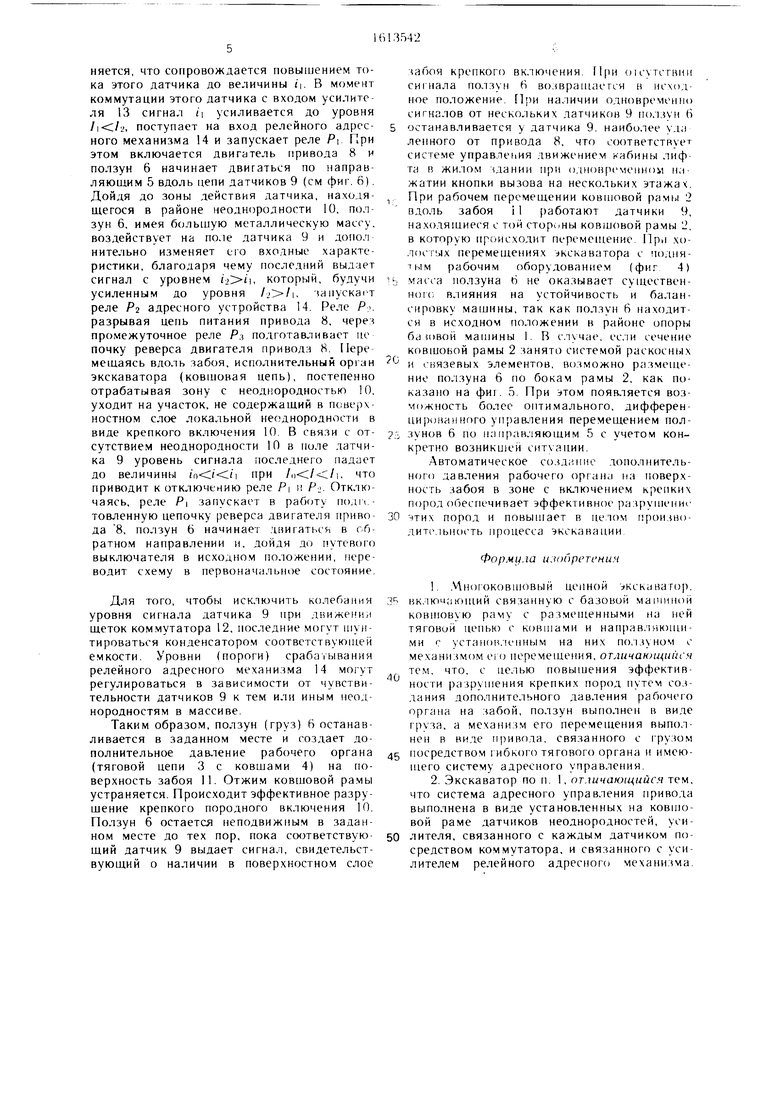
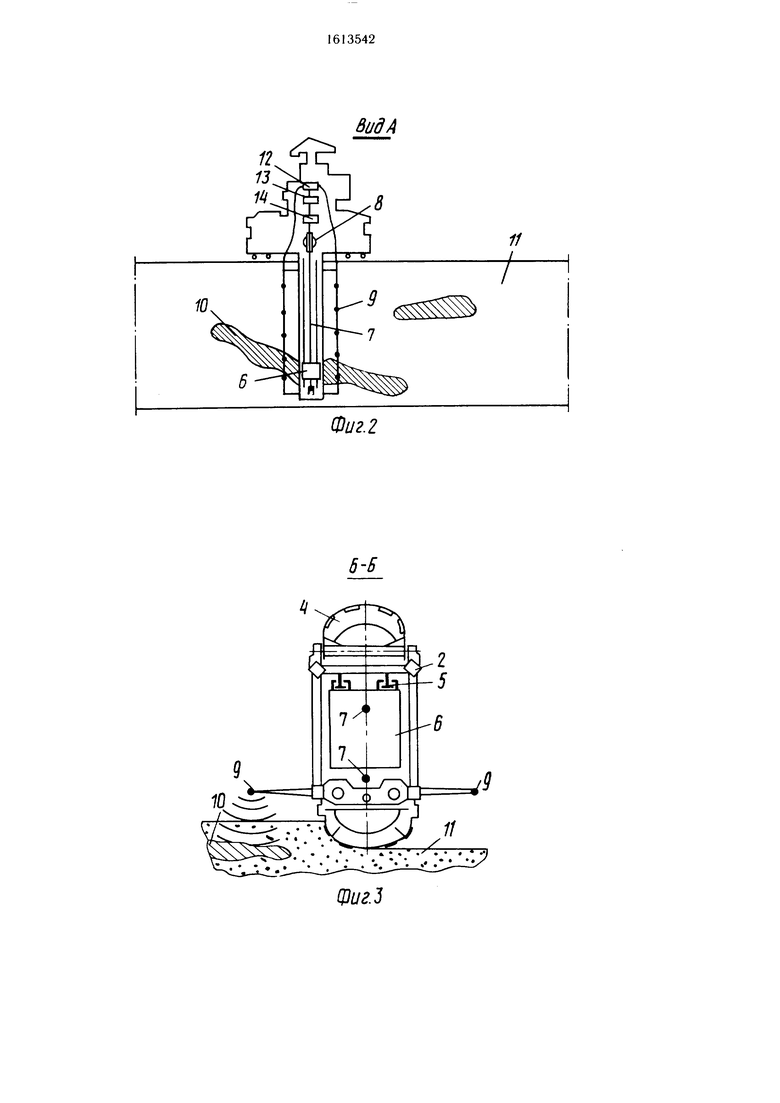
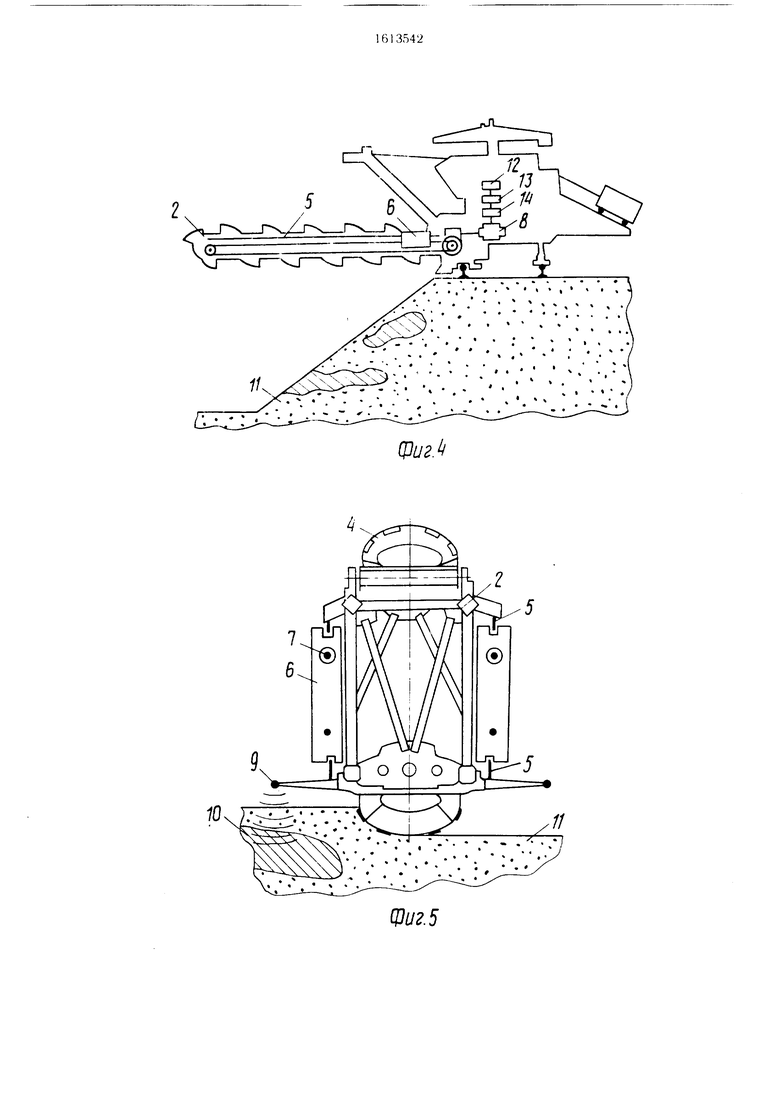
На фиг. 1 изображен мпогоков 1овы1 1 цепной экскаватор в процессе выемки горной массы, вид сбоку; на фиг. 2 вид . на (JiMi. 1; на фи1 3 разрез Б Б на фи1. 1, на (f)Hi. 4 4KCK;)uiT()D с пс лнятым рабочим оборх донанием: па фи1 . 5вариаш раз 11миен11я по.гп пов на KOBiiioBoi i раме, поперечный paзp(з; на (( И1 fi ст) ная . 1ектр()мехаиическая схема npc. i lai ас мого устроСк гва
.Апс)гок()И1пов1)1Й цепном кскав гго) включает ба.«)1ПК) машмлу I, парнирно юеди,- неннук) с пей ковшовую раму 2 с THroBoii пегП)Ю 3 н ковшами 4, а также с рас- по.юженпыми вдо/п ковшовой рамы 2 направляющими 5, по которым принудительно перемещается ползун Н в виде груза, связанны через замкнутый гибкий гяго- вый орган 7 с приводом 8. По обеим сгоро- иам ковшовой рамы 2 установлены датчики 9 неоднородностей 10, юндирующие забой 11. Каждый датчик 9 с помопхью коммутатора 12 поочередно подключается к усилителю 13. сблокированному с релейным адресным механизмом 14, управляющим приводом 8 перемепгения псктзуна 6,
Датчик 9 неоднородностей представляет собой одногранзисгорный автогенератор дециметровых Bo,iiH с открытой колебательной системой, электромагнитное поле которой проникает в массив горных пород и изменяет свои параметры (входной импеданс) в зависимости от наличия (отсутствия) геологической неоднородности (крепкого включения) в контролируемом поверхносг- ном слое, что сопровождается изменением тока в базовой цепи транзистора. Наличие больших концентрированных металлических
5
с
0
5
0
5
Mai c вб,чизи датчика .чринодит к дополпи- тельному уве.шчепик) юка в базовой цепи 1ранзистора.
Коммуrai()) 12 представляет собою шаговый искате,1ь, центральная контактная щс Т ка которого подк. 1ючена к входу усилите- 1Я 13, а каждая контактная панель соединена с соответствующим датчиком 9.
Релейный адреснь1Й механизм 14 сое тоит из грех реле и одного путевого г,1.1ключателя, срабатывающего на размыка- 11ие ieni питания двигателя )да 8 при У . laiiDiiKe ползуна (i н исходное чсх южение. 1 ()е piMC PI срабатывает при токе /i ч laiivcKaeT двигатель привода ь. Второе ре,те / , сриПатывает при и, разры- ная пепь питамия двигате тя п). Ь 8. че- |ii4 промежуточ1К)е |)еле Рл под1отав,1ивае 111 1пчку реверса двигателя. Отключаясь, )е.те PI загпскает :1ту цепочку, к(1тора ; де11ствуе до те. пор, пугевпй В1.1кл:;)ч,1 Г. ЛЬ от зуна Н.
Экскаватор работает 1,чедую1цим обр.чiOM.
Экскавация породы происходит при fj(j ковом перемещении ковщовой рамы 2 вд(),1ь забоя 1 1 в рабочем по,чожении (фи1. 1, 2) и продольном перемещении ковшовой цепи 3 вдоль ковщовой рамы 2. При отсутствии в забое крепких включений И) (то.тзун 6 находится в крайнем верхне.м исходном положении, в районе привода 8.
При отсутствии в забое 1 1 неоднородности 10 каждый из датчиков 9 вырабатывает опорный сигнал (, который поступает на усилитель 13, линейно усиливается до значения и подается на вход релейного адресного механизма 14. Поскольку уровень сигнала /о недостаточный для запуска реле Р, двигатель привода 8 не включается, ползун 6 не перемещается. При появлении в поверхностном слое забоя 11 неоднородности 10 входной импеданс ближайшего к ней датчика изме
юка не .)тает воздействия полняется, что сопровождается повышением тока этого датчика до величины i|. В момент коммутации этого датчика с входом усилителя 13 сигнал м усиливается до уровня I., поступает на вход релейного адресного механизма 14 и запускает реле Р При этом включается двигатель привода 8 и ползун 6 начинает двигаться по направляющим 5 вдоль цепи датчиков 9 (см фиг. 6). Дойдя до зоны действия датчика, находящегося в районе неоднородности 10. ползун 6, имея большую металлическую массу, воздействует на no.ie датчика 9 и допол нительно изменяет его входные характеристики, благодаря чему последний выдает сигнал с уровнем (, который, будучи усиленным до уровня . занускаг-т реле Р2 адресного устройства 14. Реле Р;. разрывая цепь питания привода 8, череч промежуточное реле Рз подготавливает не почку реверса двигателя привода 8. Пере мещаясь вдоль забоя, исполнительный орган экскаватора (ковпювая цепь), постепенно отрабатывая зону с неоднородностью 10. уходит на участок, не содержащий в поверхностном слое локальной неоднородности в виде крепкого включения 10. В связи с отсутствием неоднородности 10 в поле датчика 9 уровень сигнала последнего падает до величины ((: при . что приводит к отключению реле Р и Р. Отключаясь, реле Р| запускает в работу поли.- товленную цепочку реверса двигателя привода 8, ползун 6 начинает двигаться в обратном направлении и, дойдя до путевого выключателя в исходном положении, переводит схему в первоначальное состояние.
Для того, чтобы исключить колебания уровня сигнала датчика 9 при днижеиии щеток коммутатора 12, последние могут шунтироваться конденсатором соответствующей емкости. Уровни (пороги) срабатывания релейного адресного механизма 14 могут регулироваться в зависимости от чувствительности датчиков 9 к тем или иным неод- нородностям в массиве.
Таким образом, ползун (груз) 6 останавливается в заданном месте и создает дополнительное давление рабочего органа (тяговой цепи 3 с ковщами 4) на поверхность забоя 11. Отжим ковщовой рамы устраняется. Происходит эффективное разру- щение крепкого породного включения 10. Ползун 6 остается неподвижным в заданном месте до тех пор, пока соответствующий датчик 9 выдает сигнал, свидетельствующий о наличии в поверхностном слое
0
0
0
5
0
забоя крепкого включения. При ок утстнии сигнала ползун 6 возвращаегся R исходное положение. При наличии одновременно сигналов от нескольких датчиков 9 ползун 6 останавливается у датчика 9. наиболее уда ленного от привода 8, что соответствует системе управления движением кабины лифта Fi жи. юм (Дании при ().1новр( менном нажатии кнопки вызова на нескольких этажах. При рабочем перемещении ковшовой рамы 2 вдоль забоя i1 работают датчики 9, находящиеся с той стороны ковшовой рамы 2. в которую происходит перемещение. При хо- .к.н гых перемещениях экскаватора с поднятым рабочим оборудованием (фиг 4) .масса ползуна б не оказывает существен- ногс; влияния на устойчивость и балансировку машнны, так как ползун 6 находится в исходном положении в районе опоры ба и)вой машины 1. В случае. ec. iH сечение ковшовой рамы 2 занято системой раскосных и снязевых элементов, возможно размещение по. 1зуна 6 по бокам рамы 2. как показано на фиг. 5. При этом появляется возможность более оптимального, дифференцированного управления перемещением ползунов 6 по 11;и1рав; яющим 5 с учетом конкретно возники1ей ситуации.
Автоматическое создииис дополнительного давления рабочего органа на поверхность забоя в зоне с включением крепких пород обеспечивает эффективное разрушениг чтих пород и повышает в целом гфоизво- дит(мьность процесса экскавации.
Формула изобретения
. .V Hor OKOBuioBbu i цепной эксканагор. включ;11ощий связанную с базовой машиной ковнювую раму с размещенными на ней тяговой цепью с ковшами и направ.чяющи- ми с устанон. К нным на нн.х ползуном с механизмом е:о перемещения, отличающийся тем. что, с целью повышения эффективности разрушения крепких пород путем создания дополнительного давления рабочего органа на забой, ползун выполнен в виде груза, а механизм его перемещения выполнен в виде привода, связанного с грузом посредством гибкого тягового органа и имеющего систему адресного управления.
10
Фиг.г
Фиг.З
ВидА
//
7
фиг.
| Владимиров В | |||
| М., Т)офимов В | |||
| К | |||
| Повышение производительности карьерных мно гоковшовых экскаваторов | |||
| .V.: Недра, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для изоляции стержней для обмоток электрических машин | 1924 |
|
SU2649A1 |
| F | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Многоковшовый цепной экскаватор поперечного копания | 1978 |
|
SU735708A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
