Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и может быть использовано в бесцепных системах перемещения выемочных и проходческих машин,
Цель изобретения - повышение надежности работы механизма перемещения на пластах со сложной гипсометрией.
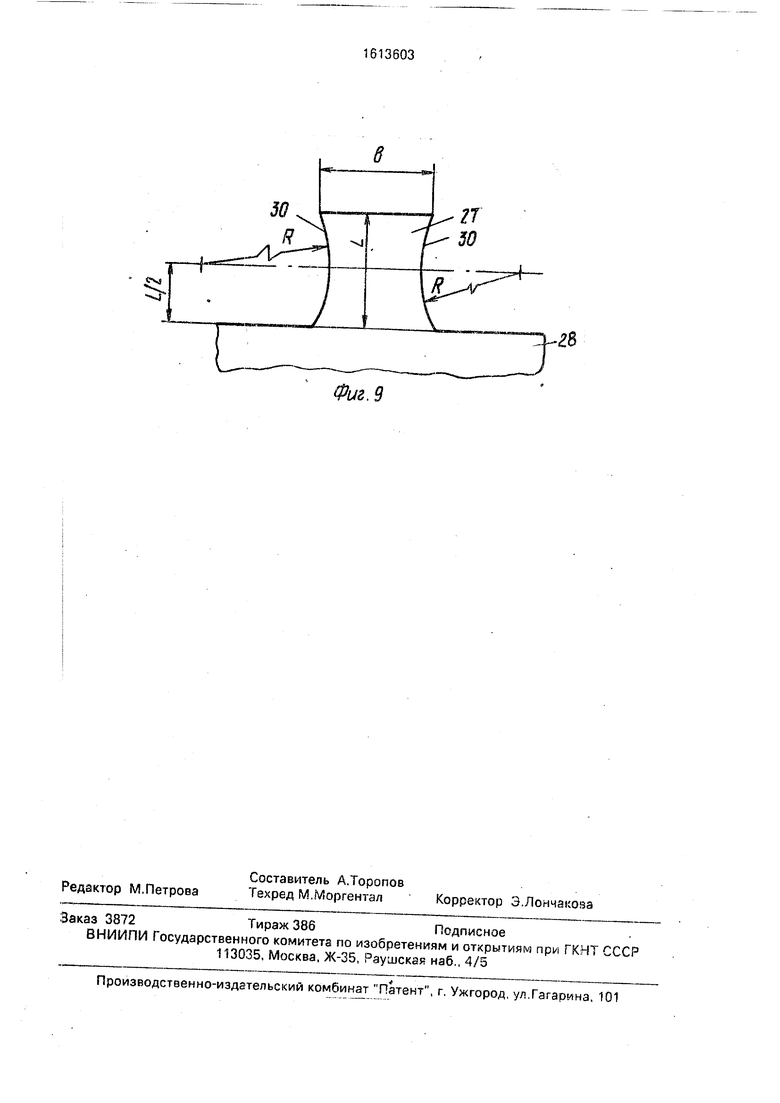
На фиг. 1 представлена схема механизма перемеидения горного комбайна, эид сбоку; на фиг. 2 - положение одного спаренного многократного параллелограмма из пары, составляющей механизм перемещения, в конце холостого хода; на фиг. 3 - схема механизма управления с короткохо- довым силовым гидродомкратом; на фиг. 4- сечение А-А на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 1; на фиг. 6 - сечение В-В на фиг. 1; на фиг. 7 - сечение Г-Г на фиг. 1; на фиг. 8 - сечение Д-Д на фиг. 1; на фиг, 9 - опора секционной направляющей рейки, вид сбоку.
Механизм перемещения выемочного комбайна включает четное число (минимум два) последовательно установленных одинаковых спаренных шарнирных многократных параллелограммов 1, каждый из которых шарнирно присоединен к корпусу 2 комбайна с завальной стороны между головной 3 и последующими 4 секциями по- , средством пальца 5, жестко закрепленного в корпусе 2. При этом к пальцу 5 одной стороной шарнирно присоединен коротко- ходовой силовой гидродомкрат 6, шарнирно соединенный с другой стороны с поперечным пальцем 7 головной секции 3. Палец 7 оснащен роликами 8 с возможностью взаимодействия их с -образным пазом 9 ползуна 10 механизма управления. Последний размещен в полости 11 направляющей 12, жестко прикрепленной к корпусу 2 комбайна, с возможностью ограниченного продольного перемещения. Ползун 10 механизма управления выполнен с боковыми проемами 13, а направляющая 12 выполнена с одной стороны с глухой опорной стенкой 14, а с противоположной стороны - со стенкой 15, выполненной с окном 16 и опорными буртиками 17. При этом угол наклона ветвей Л -образного паза 9 связан с его осевыми геометрическими размерами зависимостью
tg а b/hn ,
где b - максимальная опоры секци- онной направляющей рейки, выполненная в пределах 5 In;
h - высота Л -образного паза 9; п - кратность спаренного шарнирного многократного параллелограмма 1;
I - половина основания А -образного паза ползуна 10.
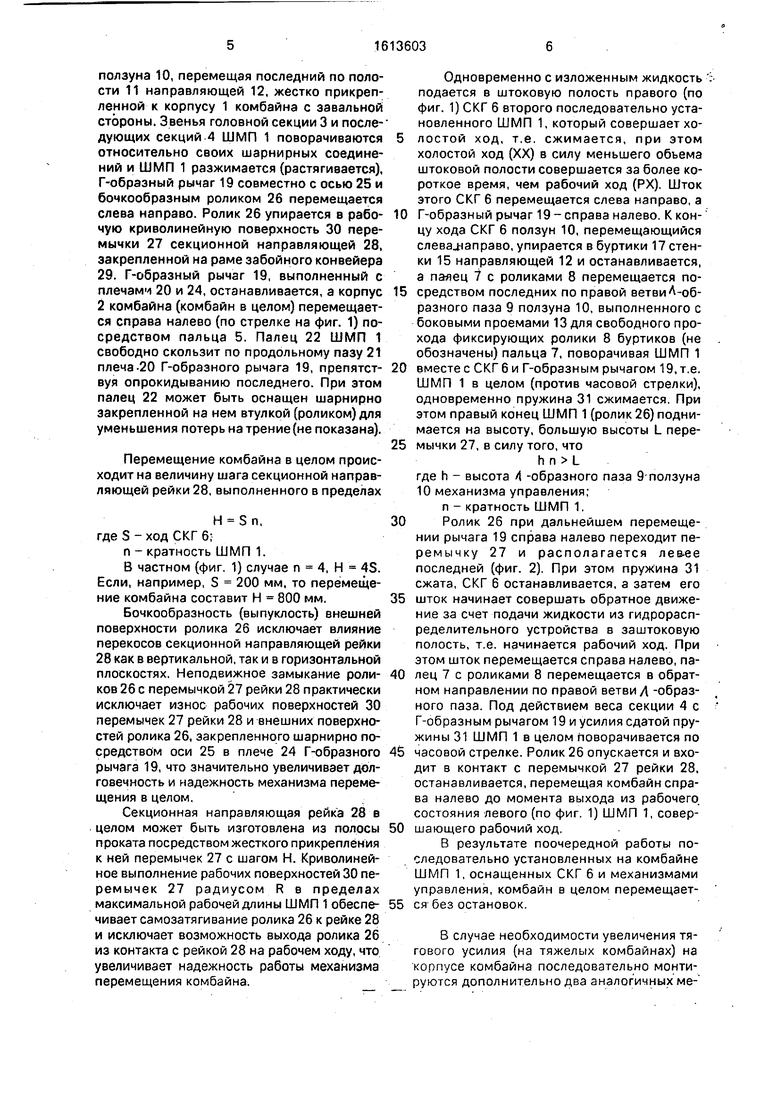
Последняя секция 18 спаренного шарнирного многократного параллелограмма 1
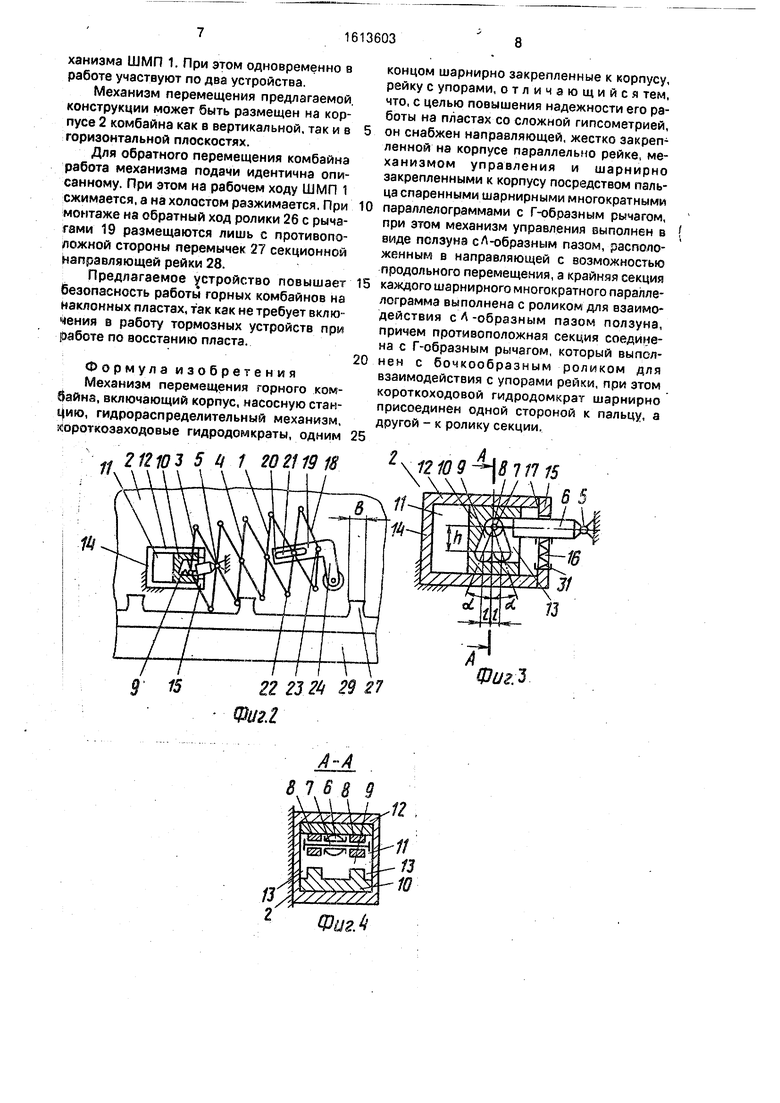
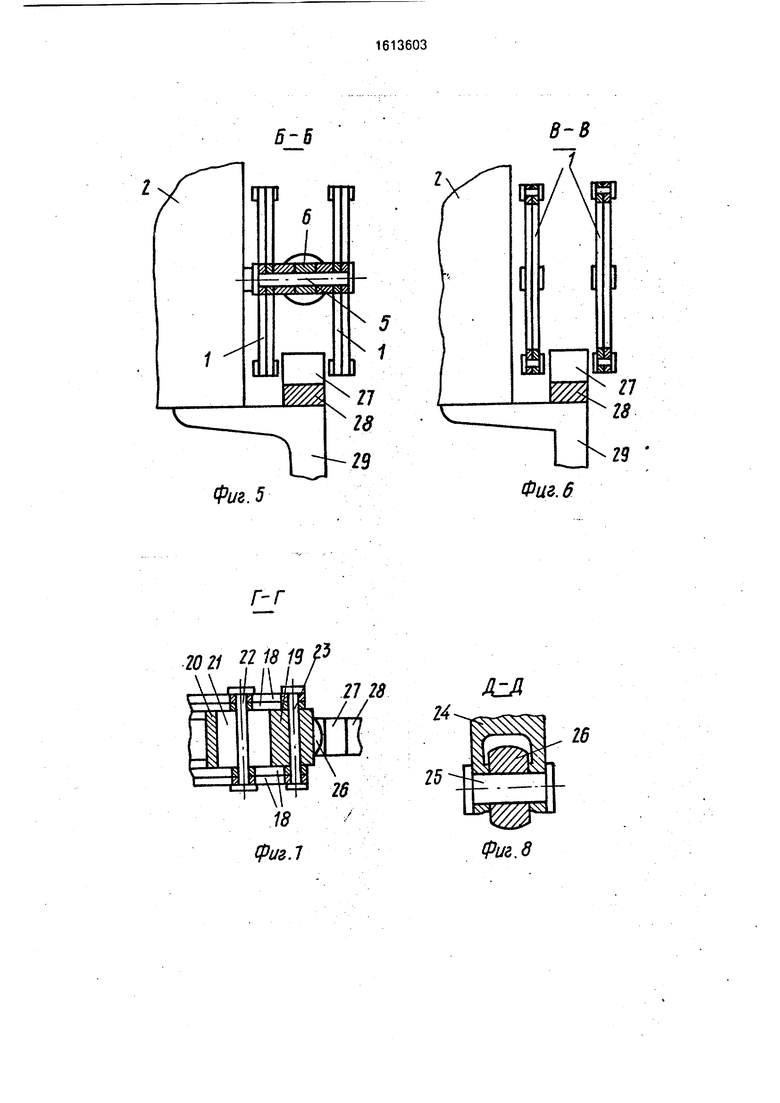
5 снабжена Г-образным рычагом 19, одно плечо 20 которого выполнено с продольным пазом 21с возможностью взаимодействия с пальцем 22 м шарнирно присоединено к последнему поперечному пальцу 23 шарнир10 ного многократного параллелограммам, а другое плечо 24 снабжено шарнирно присоединенным к нему посредством, например, оси 25 бочкообразным роликом 26 с возможностью взаимодействия его с опорами 27
15 секционной направляющей рейки 28, жёстко закрепленной на раме 29 забойного кон- зейера. Опоры 27 э вертикальной (по фиг. 9) плоскости симметрии рейки 28 выполнены с криволинейными рабочими поверхностями
20 30, радиус R кривизны которых не больше максимальной рабочей длины растянутых последующих за головной секцией 3 секций 4 шарнирного многократного параллелограмма 1. Шаг между опорами 27 секционной
25 направляющей рейки 28 выполнен в пределах
Н 3- л, где S - ход силового ги,цродомкрата 6;
п - крзтность спаренного шарнирного 0 многократного параллелограмма 1.
Высота L опор 27 секционной направляющей рейки 28 выполнена в пределах
L hn ,
где h - высота Д-образного паза 9 ползуна 5 10 механизма управления:
п - кратность шарнирного многократного параллелограмма 1,
В окне 16 стенки 15 направляющей 12 установлена пружина 31 сжатия возврата, 0 взаимодействующая одной стороной с корпусом цилиндра короткоходового. силового гидродомкрата 6, а другой - со стенкой 15. Механизм перемещения горного комбайна работает следующим образом. 5 От маслостанции через гидрораспределительный механизм по гибкому шлангу (не показаны) жидкость (масло) подается в за- штоковую полость силового короткоходового гидродомкрата (СКГ) 6, шарнирно 0 прикрепленного к головной секции 3 спаренного шарнирного многократного параллелограмма (ШМП) 1 посредством пальца 5, жестко закрепленного в корпусе 2 комбайна с одной стороны и пальца 7 с роликами 5 (втулками) 8 - с другой. При этом ШМП 1 нйходится в сжатом состоянии, соответствующем началу рабочего хода. Шток СКГ 6 перемещается снрава налево (по фиг. 1) совместно с пальцем 7 и роликами 8, взаимо- действующим / с А-образным пазом 9
ползуна 10, перемещая последний по полости 11 направляющей 12, жестко прикрепленной к корпусу 1 комбайна с завальной стороны. Звенья головной секции 3 и последующих секций 4 ШМП 1 поворачиваются относительно своих шарнирных соединений и ШМП 1 разжимается (растягивается), Г-образный рычаг 19 совместно с осью 25 и бочкообразным роликом 26 перемещается слева направо. Ролик 26 упирается в рабочую криволинейную поверхность 30 перемычки 27 секционной направляющей 28, закрепленной на раме забойного конвейера 29. Г-образный рычаг 19, выполненный с плечами 20 и 24, останавливается, а корпус 2 комбайна (комбайн в целом) перемещается справа налево (по стрелке на фиг. 1) посредством пальца 5. Палец 22 ШМП 1 свободно скользит по продольному пазу 21 плеча .20 Г-образного рычага 19, препятствуя опрокидыванию последнего. При зтом палец 22 может быть оснащен шарнирно закрепленной на нем втулкой (роликом) для уменьшения потерь на трение (не показана).
Перемещение комбайна в целом происходит на величину шага секционной направляющей рейки 28. выполненного в пределах
H Sn, где S - ход СКГ 6;
п - кратность ШМП 1.
В частном (фиг, 1) случае п 4, Н 4S. Если, например, S 200 мм, то перемещение комбайна составит Н 800 мм.
Бочкообразность (выпуклость) внешней поверхности ролика 26 исключает влияние перекосов секционной направляющей рейки 28 как в вертикальной, так и в горизонтальной плоскостях. Неподвижное замыкание роликов 26 с перемычкой 27 рейки 28 практически исключает износ рабочих поверхностей 30 перемычек 27 рейки 28 и внешних поверхностей ролика 26, закрепленного шарнирно посредством оси 25 в плече 24 Г-образного рычага 19, что значительно увеличивает долговечность и надежность механизма перемещения в целом.
Секционная направляющая рейка 28 в целом может быть изготовлена из полосы проката посредством жесткого прикрепления к ней перемычек 27 с шагом Н. Криволинейное выполнение рабочих поверхностей 30 пе- ремычек 27 радиусом R в пределах максимальной рабочей длины ШМП 1 обеспечивает самозатягивание ролика 26 к рейке 28 и исключает возможность выхода ролика 26 из контакта с рейкой 28 на рабочем ходу, что увеличивает надежность работы механизма перемещения комбайна.
Одновременно с изложенным жидкость подается в штоковую полость правого (по фиг. 1) СКГ 6 второго последовательно установленного ШМП 1, который совершает хо- 5 лостой ход, т.е. сжимается, при этом холостой ход (XX) в силу меньшего объема штоковой полости совершается за более короткое время, чем рабочий ход (РХ). Шток этого СКГ 6 перемещается слева направо, а
0 Г-образный рычаг 19 - справа налево. К кон- цу хода СКГ 6 ползун 10, перемещающийся слевалаправо, упирается в буртики 17 стенки 15 направляющей 12 и останавливается, а паяец 7 с роликами 8 перемещается по5 средством последних по правой ветвиЛ-об- разного паза 9 ползуна 10, выполненного с боковыми проемами 13 для свободного прохода фиксирующих ролики 8 буртиков (не обозначены) пальца 7, поворачивая ШМГ1 1
0 вместе с СКГ 6 и Г-образным рычагом 19, т.е. ШМП 1 в целом (против часовой стрелки), одновременно пружина 31 сжимается. При этом правый конец ШМП 1 (ролик 26) поднимается на высоту, большую высоты L пере5 мычки 27, в силу того, что
hn L
где h - высота /I -образного паза 9-ползуна 10 механизма управления: п - кратность ШМП 1.
0 Ролик 26 при дальнейшем перемещении рычага 19 справа налево переходит перемычку 27 и располагается ле&ее последней (фиг. 2). При этом пружина 31 сжата, СКГ 6 останавливается, а затем его
5 шток начинает совершать обратное движение за счет подачи жидкости из гидрораспределительного устройства в заштоковую полость, т.е. начинается рабочий ход. При зтом шток перемещается справа налево, па0 лец 7 с роликами 8 перемещается в обратном направлении по правой ветви Л -образного паза. Под действием веса секции 4 с Г-образным рычагом 19 и усилия сдатой пружины 31 ШМП 1 в целом поворачивается по
5 часовой стрелке. Ролик 26 опускается и входит в контакт с перемычкой 27 рейки 28, останавливается, перемещая комбайн справа налево до момента выхода из рабочего, состояния левого (по фиг. 1) ШМП 1, совер0 тающего рабочий ход.
В результате поочередной работы последовательно установленных на комбайне ШМП 1. оснащенных СКГ 6 и механизмами управления, комбайн в целом перемещает5 ся без остановок.
В случае необходимости увеличения тягового усилия (на тяжелых комбайнах) на корпусе комбайна последовательно монтируются дополнительно два аналогичных механизма ШМП 1. При этом одновременно в работе участвуют по два устройства.
Механизм перемещения предлагаемой конструкции может быть размещен на корпусе 2 комбайна как в вертикальной, так и в горизонтальной плоскостях.
Для обратного перемещения комбайна работа механизма подачи идентична описанному. При этом на рабочем ходу ШМП 1 сжимается, а на холостом разжимается. При монтаже на обратный ход ролики 26 с рычагами 19 размещаются лишь с противоположной стороны перемычек 27 секционной Направляющей рейки 28. . Предлагаемое устройство повышает безопасность работы горных комбайнов на наклонных пластах, так как не требует включения в работу тормозных устройств при работе по восстанию пласта.
Формула изобретения , Механизм перемещения горного ком- дайна. включающий корпус, насосную станцию, гидрораспределительный механизм йороткозаходовые гидродомкраты, одним
; 212103
дхи
202119 IS
I
22 232 2 27
5
10 15
0
5
концом шарнирно закрепленные к корпусу рейку с упорами, о т л и ч а ю щ и и с я тем что, с целью повышения надежности его работы на пластах со сложной гипсометрией он снабжен направляющей, жестко закреп ленной на корпусе параллельно рейке механизмом управления и шарнирно закрепленными к корпусу посредством пальца спаренными шарнирными многократными параллелограммами с Г-образным рычагом при этом механизм управления выполнен в виде ползуна сЛ-образным пазом, расположенным в направляющей с возможностью продольного перемещения, а крайняя секция каждого шарнирного многократного параллелограмма выполнена с роликом для взаимодействия с Л-образным пазом ползуна причем противоположная секция соединена с Г-образным рычагом, который выполнен с бочкообразным роликом для взаимодействия с упорами рейхи, при зтом короткоходовой гидродомкрат шарнирно присоединен одной стороной к пальцу а другой - к ролику секции.
5 й1Ш 5
Ш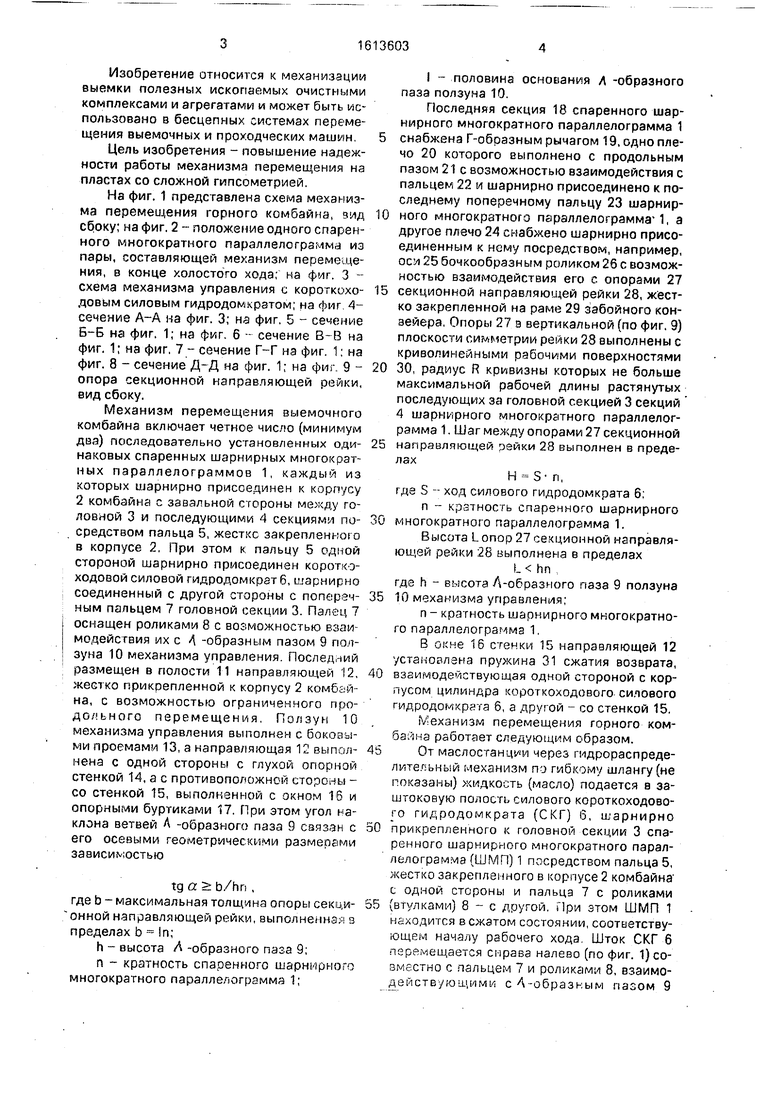
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1652541A1 |
| Универсальный самоходный хлопкоуборочный комбайн | 1991 |
|
SU1819527A1 |
| КОМПЛЕКС ДЛЯ НАКЛОННЫХ И КРУТЫХ ПЛАСТОВ КДК ДОЛИНСКОГО, СТАВ КОНВЕЙЕРА, СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСА | 2004 |
|
RU2276729C1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666702A1 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2327328C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Механизм подачи очистного комбайна | 1988 |
|
SU1573164A2 |
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1666699A1 |
| Механизм перемещения выемочного комбайна | 1985 |
|
SU1411463A1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и может быть использовано в бесцепных системах перемещения выемочных и проходческих машин. Цель - повышение надежности работы механизма перемещения на пластах со сложной гипсометрией. Механизм перемещения горного комбайна включает спаренные шарнирные многократные параллелограммы (ШМП) 1, каждый из которых шарнирно присоединен к корпусу 2 комбайна с завальной стороны между головной секцией 3 и последующими секциями 4 посредством пальца (П) 5. К П 5 одной стороной шарнирно присоединен короткоходовой силовой гидродомкрат 6, шарнирно соединенный с другой стороны с поперечным П 7 головной секции 3. При этом П 7 оснащен роликами с возможностью взаимодействия их с Л-образным пазом 9 ползуна 10 механизма управления. Ползун 10 размещен в направляющей 12 с возможностью продольного перемещения. Последняя секция ШМП 1 имеет Г-образный рычаг 19, одно плечо 20 которого выполнено с продольным пазом 21 с возможностью взаимодействия с П 22, а другое плечо 24 имеет бочкообразный ролик 26 для взаимодействия с упорами 27 секционной направляющей рейки 28. Комбайн перемещается в результате поочередной работы последовательно установленных на нем ШМП 1, оснащенных силовыми короткоходовыми гидродомкратами 6 и механизмами управления. 9 ил.
Фиг
Ai A В 16 в д
л I
7 X ХХХХ.
lj/ ZZz22Z2
Фи2.
12
6-6
т
т
JS / / fySjf iKiKffK
т
т
Фиг. 5
-2021 21819
в-в
I
ч
. Ч.
NJ
ч
27
гв гв
Фаг. 6
ДгЛ
fpue.d
Фш. 9
| Механизм подачи горной машины по направляющей | 1981 |
|
SU1073454A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
