Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и может быть использовано в бесцепных системах выемочных комбайнов,
Цель изобретения - повышение надежности работы на наклонных пластах.
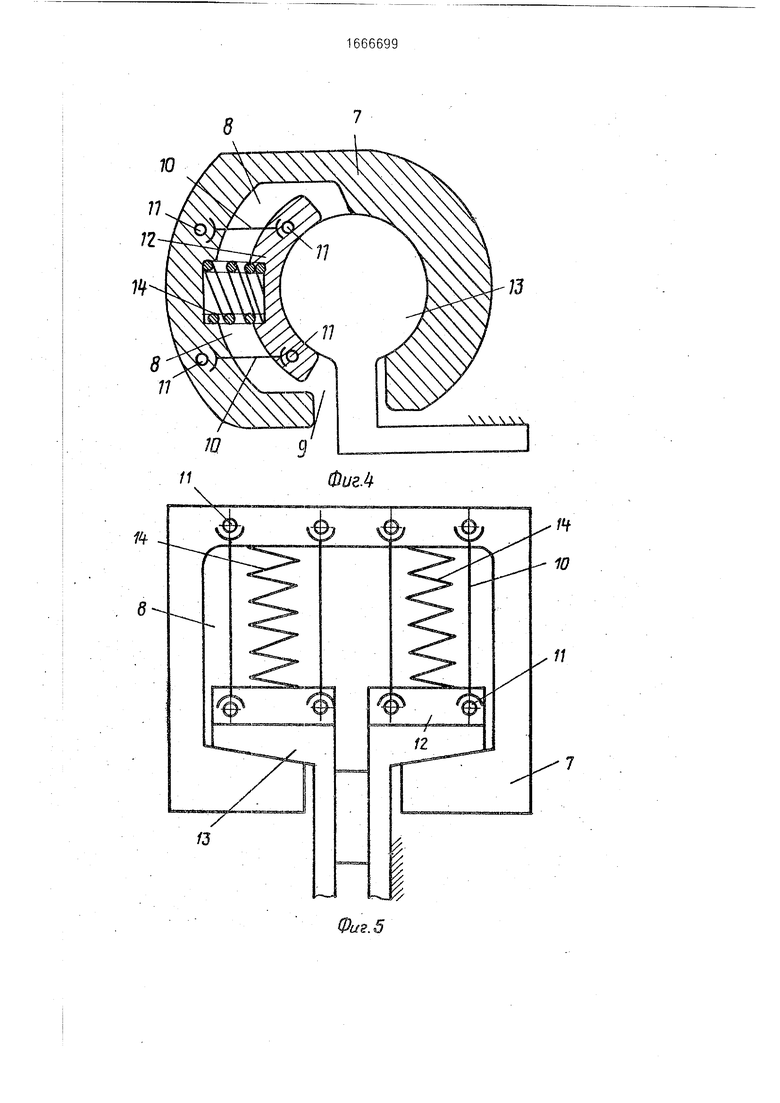
На фиг.1 изображена схема механизма перемещения выемочного комбайна, вид сбоку; на фиг.2 - схема механизма захвата с секционной направляющей, продольный разрез; на фиг.З - то же, поперечный разрез, вариант,когда планки механизма захвата и секционная направляющая выполнены с плоскими поверхностями взаимодействия; на фиг.4 - то же, поперечный разрез, вариант, когда планки механизма захвата и секционная направляющая выполнены с криволинейными поверхностями взаимодействия; на фиг,5 - то же, поперечный разрез, вариант, когда в полой планке механизма захвата симметрично продольной оси ее размещены одновременно две планки, а секционная направляющая выполнена Т-образной формы.
Механизм перемещения выемочного комбайна включает гидродомкраты 1 и 2, шарнирно закрепленные на раме 3 корпуса комбайна, штоки 4 и 5 которых соединены сферическими шарнирами 6с полыми планками 7 механизмов захватов, каждый из которых содержит полую планку 7, выполненную со сквозной полостью 8 и прорезью 9, и соединенную промежуточными параллельными звеньями 10 равной длины посредством сферических шарниров 11 с планкой 12, размещенной в полости 8 планки 7, выполненной с прорезью 9 для прохода секционной направляющей 13, которая выполнена, например, в виде полосы прямоугольного (фиг.З), криволинейного (фиг.4) или Т-образного поперечного сечения (фиг.5) с возможностью крепления к раме конвейера (показана штриховкой). Поверхности взаимодействия полой планки 7, планки 12 и секционной направляющей 13 выполнены одинаковыми по форме. Между полой планкой 7 и планкой 12 с одной стороны размещены пружины сжатия 14, обеспечивающие прижим указанных планок с секционной направляющей 13, которая размещена между планкой 12 с другой стороны ее и полой планкой 7 с возможностью взаимодействия с планками 7 и 12, При этом расстояние (зазор) между поверхностями взаимодействия планок 7 и 12 с секционной направляющей 13 в положении планок 7 и 12 перпендикулярно промежуточным параллельным звеньям 10 равной длины, выполнено меньшим расстояния между
наружными поверхностями секционной направляющей 13, т.е. меньше толщины секционной направляющей 13. В целом механизмы захватов включают элементы 7,
10, 12, 14 и размещены на секционной направляющей 13. Кроме того, каждый механизм захвата может содержать полую планку 7, выполненную со сквозной полостью 8 и прорезью 9, соединенную проме0 жуточными параллельными звеньями 10 равной длины посредством сферических шарниров 11 с двумя планками 12 (фиг.5), помещенными в полости 8 планки 7 симметрично продольной оси ее с возможностью
5 взаимодействия планок 7 и 12 с секционной направляющей 13, выполненной в поперечном сечении Т-образно. Пружины сжатия 14, обеспечивающие прижим полой планки 7 и обеих планок 12 к секционной направля0 ющей 13, установлены между указанными планками также симметрично продольной оси полой планки 7.
Механизм перемещения работает следующим образом.
5 Механизм перемещения выемочного комбайна включает два одинаковых по конструкции механизма захватов шарнирно присоединенных к штокам 4 и 5 гидродомкратов 1 и 2, шарнирно прикрепленных к
0 раме 3 корпуса комбайна. Оба захвата расположены на секционной направляющей 13 с возможностью взаимодействия с нею планок 7 и 12 захвата.
Для движения комбайна, например,
5 слева направо по стрелке Ул от гидропривода комбайна, содержащего гидрораспределительный механизм (не показаны) жидкость подается в заштоковую полость гидродомкрата 1 и штоковую полость гидро0 домкрата 2. При этом шток 4 гидродомкрата 1 перемещается справа налево по стрелке А, шток 5 гидродомкрата 2 перемещается слева направо по стрелке Б.
Шток 4 гидродомкрата 1 перемещает
5 соединенную с ним посредством сферического шарнира 6 полую планку 7 левого (по фиг.1) механизма захвата также справа налево. Промежуточные параллельные звенья 10 равной длины, соединенные сферически0 ми шарнирами 1 с полой планкой 7 и планкой 12, размещенной в сквозной полости 8 полой планки 7, выполненной с прорезью 9, и наклоненные вправо относительно планки 12 (по фиг.1 и 2) поворачиваются против
5 часовой стрелки и распирают полую планку 7 и планку 12, прижимая их к секционной направляющей 13, т.е. заклинивают планки 7 и 12 на секционной направляющей 13., выполненной в виде полосы прямоугольной (фиг.З), криволинейноой (фиг.4) или Т-образной (фиг.5) формы в поперечном сечении с возможностью закрепления на неподвижной раме конвейера (на фиг.2-3 указана штриховкой). При этом, полая планка 7, планка 12 и промежуточные параллельные звенья 10 равной длины останавливаются, т.е. механизм захвата в целом останавливается, останавливая шток 4 гидродомкрата 1, а цилиндр его, закрепленный на раме 3 корпуса комбайна перемещается совместно с комбайном в направлении подачи Vfl.
Наклон промежуточных параллельных звеньев 10 равной длины при монтаже механизмов захватов на секционной направляющей 13 возможен за счет того, что в свободном состоянии механизмов захватов промежуточные параллельные звенья 10 равной длины расположены перпендикулярно полой планке 7 и планке 12, а рассто- яние (зазор) между поверхностями взаимодействия планок 7 и 12 с наружными поверхностями полосы секционной направляющей 13 в э/гом положении выполнено меньшим расбтояния между ее наружными поверхностями, с которыми взаимодействуют планки 7 и 12, т.е. меньше толщины полосы секционной направляющей 13. Если эта толщина будет выполнена равной или меньшей зазора между планками 7 и 12, в котором размещается секционная направляющая 13, в положении планок 7 и 12 перпендикулярнопромежуточнымпараллельным звеньям 10 равной длины, то механизм захвата не будет работать как захват, т.е. планки 7 и 12 не будут заклиниваться на секционной направляющей 13, а будут проскальзывать по ней или проходить свободно, не касаясь ее поверхности.
Назначение пружин 14 - обеспечение постоянного соприкосновения планок 7 и 12 с полосой секционной направляющей 13. В то же время жидкость, поступающая из гидросистемы комбайна в штоковую полость гидродомкрата 2, закрепленного на раме 3 корпуса комбайна, перемещает шток 5 этого гидродрмкрата слева направо по стрелке Б. Шток 5, соединенный сферическим шарниром 6, с полой планкой 7 второго (правого по фиг.1) механизма захвата той же конструкции и того же расположения звеньев, что и описанный выше, перемещает полую планку 7 в том же направлении. Планка 7 поворачивает промежуточные параллельные звенья 10 равной длины, наклоненные вправо относительно планки 12, по часовой стрелке. При этом планки 7 и 12 освобождаются от распорного усилия звеньев 10, сжимают пружины 14, освобождая от заклинивания на секционной направляющей 13 планки 7 и 12,и механизм захвата в
целом перемещается свободно по секционной направляющей 13, проходящей по прорези 9 планки 7, совместно со штоком 5 гидродомкрата 2. При этом, вследствие раз- 5 ности объемов в штоковой и заштоковой полостях гидродомкратов 1 и 2, перемещение штока 5 происходит быстрее перемещения штока 4 относительно цилиндра гидродомкрата 1, т.е. до момента остановки 10 цилиндра гидродомкрата 1, перемещающего комбайн в направлении У,шток 5 гидродомкрата 2 совместно со своим механизмом захвата возвращается в исходное для рабочего хода (подачи машины) положение. По- 15 дачей жидкости в заштоковую полость гидродомкрата 2 производится выдвижение штока 5 справа налево и заклинивание правого механизма захвата на секционной направляющей 13 до момента остановки
20 цилиндра гидродомкрата 1, что обеспечивает безостановс шую подачу выемочного комбайна в направлении V. По вступлении в работу гидродомкрата 2 и правого (по фиг.1) механизма захвата шток 4 гидродом5 крата 1 подачей жидкости в штоковую полость перемещается слева направо, расклинивает аналогичным вышеописанному образом левый механизм захвата с секционной направляющей 13, свободно
0 перемещая его по последней- в том же направлении в исходную для рабочего хода позицию. При этом секционная направляющая 13 свободно проходит по прорези 9 полой планки 7. Затем цикл повторяется.
5 Обратное перемещение комбайна можно осуществить так: при остановленном комбайне отсоединить полые планки 7 механизмов захватов от штоков 4 и 5, разъединив шарниры 6, и присоединив теми же
0 шарнирами 6 штоки 4 и 5 гидродомкратов 1 и 2 к планкам 12 каждого механизма захвата. Это осуществляется без сьема механизмов захватов с секционной направляющей 13, либо произвести при снятых с секцион5 ной направляющей 13 механизмах захватов поворот промежуточных параллельных звеньев 10 в обратную представленному (на фиг.1 и 2) сторону относительно планок 12, т.е. сместив при монтаже планки 12 относи0 тельно полых планок 7 вправо так, чтобы наклон промежуточных параллельных звеньев 10 был противоположным относительно планок 7 и 12 (представленному на фиг.1 и 2). В этом случае штоки 4 и 5 гидро5 домкратов 1 и 2 присоединяются к тем же полым планкам 7 механизмов захватов. Кроме того, если в конструкцию комбайна включить четыре гидродомкрата, шэрнирно соединенные с корпусом 3 и механизмами
захватов, то в одну сторону работает одна
пара гидродомкратов и механизмов захватов при выключенной другой паре, а в обратную сторону, наоборот, первая пара выключается и включается в работу другая пара. При этом механизмы захватов не отсоединяются от штоков гидродомкратов вообще.
В описываемой конструкции механизма перемещения выемочного комбайна отсутствует относительное движение взаимодействующих с секционной направляющей 13 планок 7 и 12 механизмов захватов на рабочем ходу комбайна, которые жестко с ней сцепляются под действием поворачивающихся промежуточных параллельных звеньев 10 равной длины. Это исключает влияние геометрии элементов сцепления секционной направляющей и планок механизмов захватов при перекосах комбайна относительно секционной направляющей в любом направлении, так как планки 7 и 12 механизмов захватов соединены посредством сферических шарниров 11 с промежуточными параллельными звеньями 10 равной длины, а полые планки 7 соединены со штоками 4 и 5 гидродомкратов 1 и 2 сферическими шарнирами 6, Вследствие наличия пружин сжатия 14, расположенных между планками 7 и 12 механизмов захватов, обеспечивается немедленное и надежное сцепление планок с секционной направляющей 13 в первый же момент рабочего хода штоков 4 и 5 гидродомкратов 1 и 2, что приводит к повышению надежности и долговечности тягового органа в целом.
Использование в механизмах захватов механизма параллелограмма обеспечивает немедленный отвод планок 7 и 12 от секционной направляющей 13, исключает возможность заклинивания планок на направляющей при расклинивании механизмов захватов.
Кроме того, конструкция механизма перемещения выемочного комбайна не требует производства зубчато-цевочных направляющих и зубчатых колес, не требует
высокой.точности изготовления элементов механизма захвата и секционной направляющей, для которой можно использовать серийно выпускаемый профильный прокат,
что в значительной степени снижает затраты на производство тяговых органов бес- цепной системы подачи выемочных машин. Использование описанных механизмов захватов повышает надежность работы выемочных комбайнов на наклонных пластах, так как эти механизмы захватов исключают возможность обратного сползания машины при работе по восстанию пласта. Формула изобретения
Механизм перемещения выемочного комбайна, включающий раму корпуса комбайна, гидропривод с гидрораспределительным механизмом и гидродомкратами, шарнирно связанными с рамой корпуса и
механизмами захватов, расположенных с возможностью взаимодействия с секционной направляющей, закрепленной на раме конвейера, отличающийся тем, что, с целью повышения надежности работы на
наклонных пластах, секционная направляющая выполнена в виде полосы, прикрепленной к раме конвейера, а каждый механизм захвата выполнен в виде полой планки со сквозной полостью и прорезью, соединенной посредством сферических шарниров и промежуточных параллельных звеньев равной длины с планкой, размещенной в полости полой планки, при этом между полой планкой и планкой, размещенной в ее полости, с одной стороны установлены пружины сжатия, а с другой - размещена секционная направляющая с возможностью взаимодействия с обеими планками, причем расстояние между поверхностями взаимодействия
0 планок с секционной направляющей, в положении их перпендикулярно промежуточным параллельным звеньям равной длины, выполнено меньшим размера между наружными поверхностями секционной направля5 ющей,
//
/4 // Ю // /4 Н 1° J
I Г Г f ЛГ f
//// tf
Фиг, 2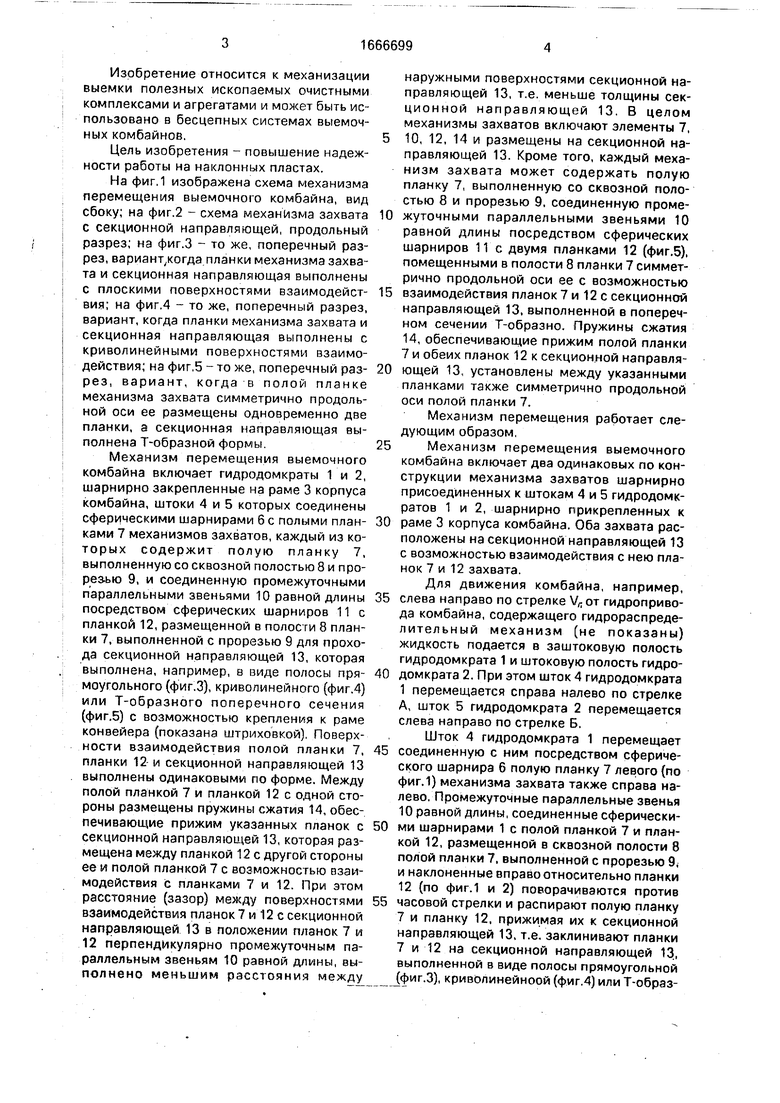
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1652541A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1689609A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666702A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666703A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1425320A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1411466A1 |
| Механизм перемещения выемочного комбайна | 1985 |
|
SU1310518A1 |
| Механизм перемещения горного комбайна | 1987 |
|
SU1613603A1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| Зерноуборочный комбайн | 1981 |
|
SU1045846A1 |
Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами. Цель - повышение надежности работы на наклонных пластах. На раме конвейера закреплена секционная направляющая (СН) 13 в виде полосы, с которой взаимодействуют механизмы захватов. Последние выполнены в виде полой планки (П) 7 со сквозной полостью и прорезью, соединенной посредством сферических шарниров 6 и промежуточных параллельных звеньев 10 равной длины с П 12, размещенной в полости П 7. Причем между П 7 и 12 с одной стороны установлены пружины 14 сжатия, а с другой размещена СН 13 с возможностью взаимодействия с обеими П 7 и 12. Расстояние между поверхностями взаимодействия П 7 и 12 с СН 13 в положении их, перпендикулярном промежуточным звеньям 10, выполнено меньшим размера между наружными поверхностями СН 13. С механизмами захватов и с рамой 3 корпуса комбайна связаны гидродомкраты 1 и 2 гидропривода, имеющего гидрораспределительный механизм. В механизме перемещения отсутствует относительное движение П 7 и 12, взаимодействующих с СН 13, на рабочем ходу комбайна, т.к. посредством звеньев 10 П 7 и 12 жестко сцепляются с СН 13. Это исключает влияние геометрии элементов сцепления СН 13 и П 7 и 12 при перекосах комбайна относительно СН 13. Пружины 14 обеспечивают П 7 и 12 немедленное и надежное сцепление с СН 13 в момент рабочего хода штоков 4 и 5 гидродомкратов 1 и 2. 5 ил.
Фиг.3
ю
8
11
Ш
11
ФигЛ
К
Ъ9
в
13
в &
14- 10
11
| Механизм подачи горных комбайнов | 1977 |
|
SU693003A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Механизм подачи выемочной машины | 1974 |
|
SU613102A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Бесцепные системы подачи зарубежных очистных комбайнов, экспресс-информация, Вып.37 | |||
| М.: ЦНИЭИуголь, 1982, с.21. | |||
