иг. 5
Изобретение относится к подьемио- транспортному оборудованию, в частности к грузозахватным системам.
Цель изобретения - расширение эксплуатационных возможностей путем исключения раскачивания груза.
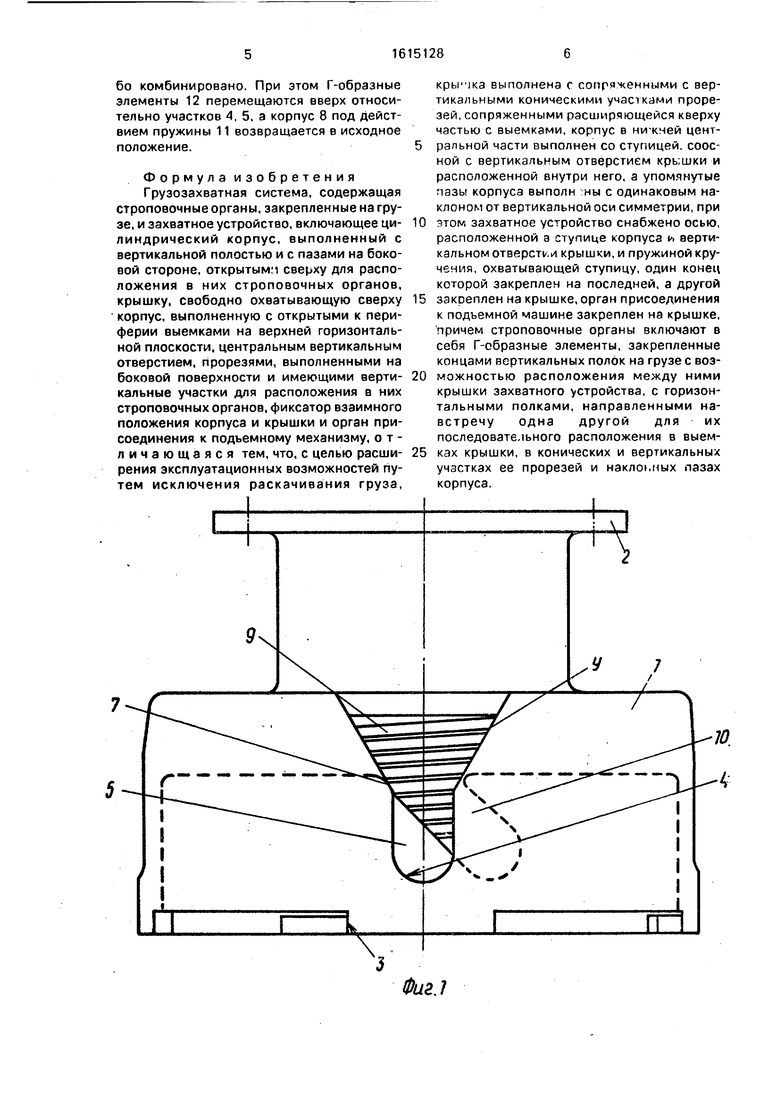
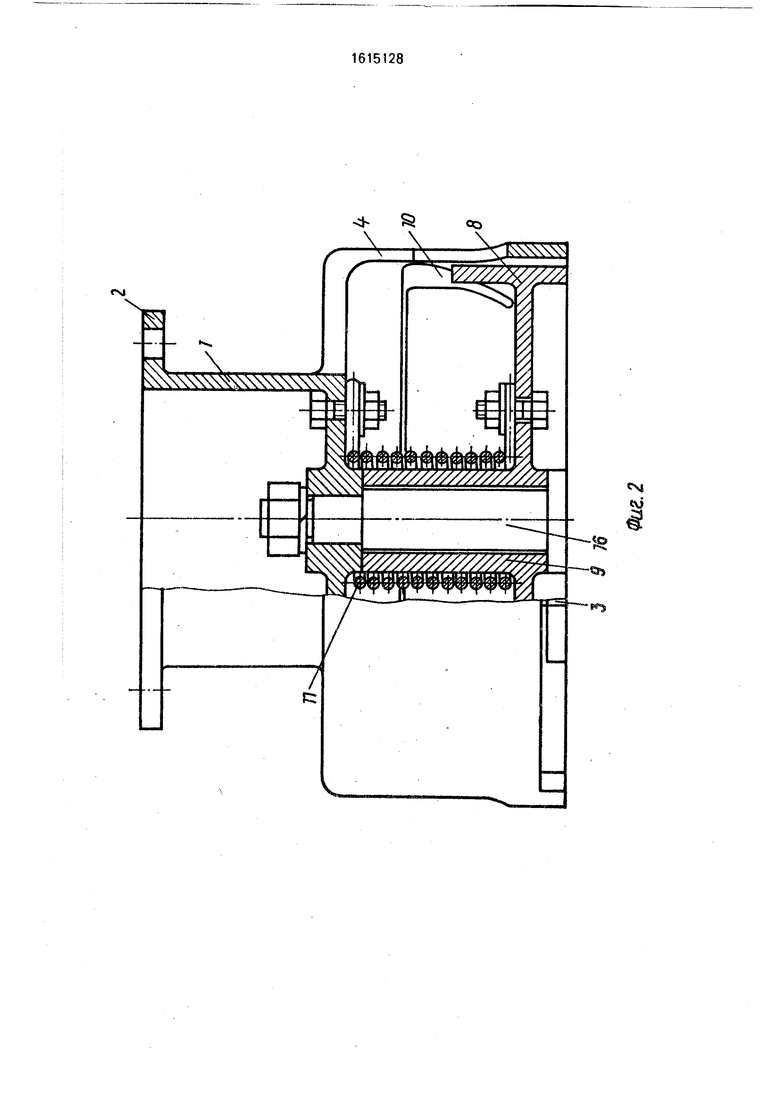
На фиг. 1 изображена грузозахватная система, общий вид; на фиг. 2 - то же, частичный вертикальный разрез; на фиг. 3 - захватное устройство в момент завода в строповочные органы груза; на фиг. 4 - то же, в момент совмещения вертикальных осей захватного устройства и груза; на фиг. 5 - то же, в рабочем положении.
Грузозахватная система содержит захватное устройство, которое включает крышку 1, выполненную в виде стакана, снабженного фланцем 2 с отверстиями для крепления к грузоподъемному механизму. Крышка 1 имеет упор 3, конические расширяющиеся кверху участки 4, вертикальные участки 5 и выемки б, образующие прорези 7. Захватное устройство также содержит цилиндрический корпус 8 со ступицей 9 и с наклонными пазами 10 на боковой стороне. На ступице 9 расположена пружина 11 кручения, один конец которой закреплен на крышке 1, а другой - на корпусе 8. Верхняя часть наклонных пазов а исходном положении совпадает с участками 4 и 5 сопряже- ния, а нижняя часть смещена в направлении, противоположном возможно-. му вращению корпуса 8 от исходного поло- жения. Строповочный орган груза, входящий в грузозахватную систему, включает Г-образиые элементы 12 с горизонталь- ными полками 13, направленными -:австречу друг другу, и вертикальными полками 14. закрепленными на грузе.
Грузозахватная система работает следующим образом.
В исходном положении захватное устройство и груз 15 находятся друг от друга на некотором расстоянии, при этом вертикальный участок 4 прорези крышки 1 и паз 10 корпуса 8 совпадают. Перемещая груз 15 по направлению стрелки Б (фиг. 3) или захватное устройство в противоположном стрелке Б нагфавлении, или комбинировано - захватное устройство и груз 15 навстречу друг Apyfy. добиваются совпадения их осей (фиг. 4). Неточность совпадения осей компенсируется выполнением конических участков 4, что при подъеме системы автоматически центрирует груз 15 относительно захватного устройства. Далее груз 15 перемещают по направлению стрелки В вниз (фиг. 5) или захват в противоположном стрелке В направлении, или комбинировано - захват вверх, груз 15 вниз, при этом полки 13 Г-образных элементов 12, перемещаясь вдоль участков 4 и 5 прорезей, соприкасаются с наклонными пазами 10 корпуса 8 и, преодолевая сопротивление пружины 11, поворачивают корпус 8 относительно крышки 1 до тех пор, пока Г-образные элементы 12 не повиснут на вертикальных участках 5 крышки 1 (рабочее положение захвата), при этом верхняя часть пазов 10 перекроет участки 4,
0 чем автоматически зафиксирует груз 15 от раскачивания относительно захватного устройства. Это вытекает из того, что внешние возмущающие усилия, действующие на груз 15, можно представить в виде горизонталь5 ной и вертикальной составляющих силы и момента сил, приложенных к Г-образным элементам 12 груза 15. Под действием горизонтальной составляющей силы груз 15 не сместится относительно устройства, так как
0 она прижимает Г-образные элементы 12 к вертикальным участкам 5, что исключает взаимное перемещение. Вертикальная составляющая силы, направленная вниз, также не нарушит взаимного положения груза
5 15 относительно устройства. Не нарушит фиксацию Г-образных элементов 12 в участках 5 устройства и момент сил, одна из сил которого прижимает часть Г-образных элементов 12 к участкам 5 крышки 1 и к нижней
0 час;и наклонных пазов 10 корпуса 8, а другая, равная по модулю и противоположная по направлению, поднимает остальные Г- образные элементы 12 и действует на верхнюю часть пазов 10 корпуса 8, стремясь
5 повернуть последний и раскрыть участки 5, т.е. расфиксировать Г-образные элементы 12, Однако это не произойдет, так как силы, действующие на нижние и верхние части пазов 10 корпуса 8, равны по величине и
0 противоположны по направлению, а вес груза 15 равномерно распределен между Г-об- разными элементами, направлен вниз и совпадает по направлению с силой, действующей на нижнюю часть пазов 10, в ре5 зультате чего усилия на последние увеличиваются, а на верхнюю часть пазов 10 уменьшаются, т.е. при действии внешнего момента сил на груз 15, усилия, удерживающие корпус 8 в рабочем положении, будут
0 больше усилий, стремящихся вернуть его в исходное положение. Вернуть корпус 8 в исходное положение, т.е. расфиксировать участки 5, может только усилие, направленное вертикально вверх и большее по моду5 лю веса транспортируемого груза 15, что и имеет место при освобождении устройства от последнего. Освобождение захвата от груза 15 производится перемещением в вертикальной плоскости либо груза 15 вверх, либо захватного устройства вниз, либо комбинировано. При этом Г-образные элементы 12 перемещаются вверх относительно участков 4, 5. а корпус 8 под действием пружины 11 возвращается в исходное положение.
Ф о р м у л а и 3 о б р е т е н и я Грузозахватная система, содержащая строповочные органы, закрепленные на грузе, и захватное устройство, включающее ци- линдрический корпус, выполненный с вертикальной полостью и с пазами на боковой стороне, открытыми сверху для расположения в них строповочных органов, крышку, свободно охватывающую сверху корпус, выполненную с открытыми к периферии выемками на верхней горизонтальной плоскости, центральным вертикальным отверстием, прорезями, выполненными на боковой поверхности и имеющими вертикальные участки для расположения в них строповочных органов, фиксатор взаимного положения корпуса и крышки и орган присоединения к подъемному механизму, отличающаяся тем, что, с целью расширения эксплуатационных возможностей путем исключения раскачивания груза.
кры чка выполнена с сопряженными с вертикальными коническими участками прорезей, сопряженными расширяющейся кверху частью с выемками, корпус в нижней центральной части выполнен со ступицей, соос- ной с вертикальным отверстием крышки и расположенной внутри него, а упомянутые пазы корпуса выполн :ны с одинаковым наклоном от вертикальной оси симметрии, при
этом захватное устройство снабжено осью, расположенной а ступице корпуса и вертикальном OTBepCTi .H крышки, и пружиной кручения, охватывающей ступицу, один конец которой закреплен на последней, а другой
закреплен на крышке, орган присоединения к подъемной машине закреплен на крышке, причем строповочные органы включают в себя Г-сбразные элементы, закрепленные концами вертикальных полок на грузе с возможностью расположения между ними крышки захватного устройства, с горизонтальными полками, направленными навстречу одна другой для их последовательного расположения в выемках крышки, в конических и вертикальных участках ее прорезей и наклонных лазах корпуса.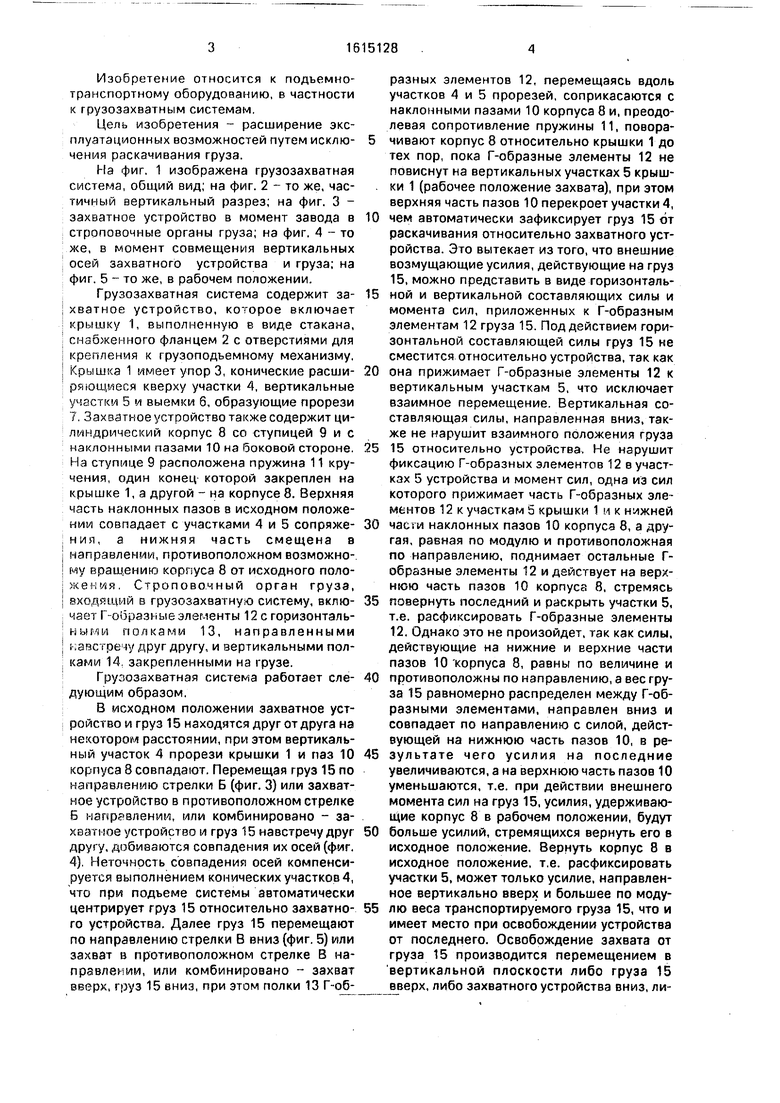
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная система | 1989 |
|
SU1723002A2 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ МИНЕРАЛЬНОГО СОРА И РАСТИТЕЛЬНЫХ ПРИМЕСЕЙ В ЗАТАРЕННЫХ КОНТЕЙНЕРАХ С КОРНЕВОЙ МАССЫ СОЛОДКИ В КАЧЕСТВЕ ЛЕКАРСТВЕННОГО СЫРЬЯ | 2000 |
|
RU2176896C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство | 1990 |
|
SU1744033A1 |
| Грузозахватное устройство | 1987 |
|
SU1618722A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОМАТИЗИРОВАННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2268229C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным системам. Цель изобретения - расширение эксплуатационных возможностей путем исключения раскачивания груза. Грузозахватная система содержит захватное устройство, включающее крышку 1 с прорезями 7 и выемками 6, поворотный корпус 8 с пазами и груз с Г-образными элементами, входящими в прорези 7 и пазы. 5 ил.
Фиг,
«NJ
еч| «vj
12
П
| Грузозахватное устройство | 1982 |
|
SU1071563A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
