Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным системам.
Цель изобретения - повышение надежности.
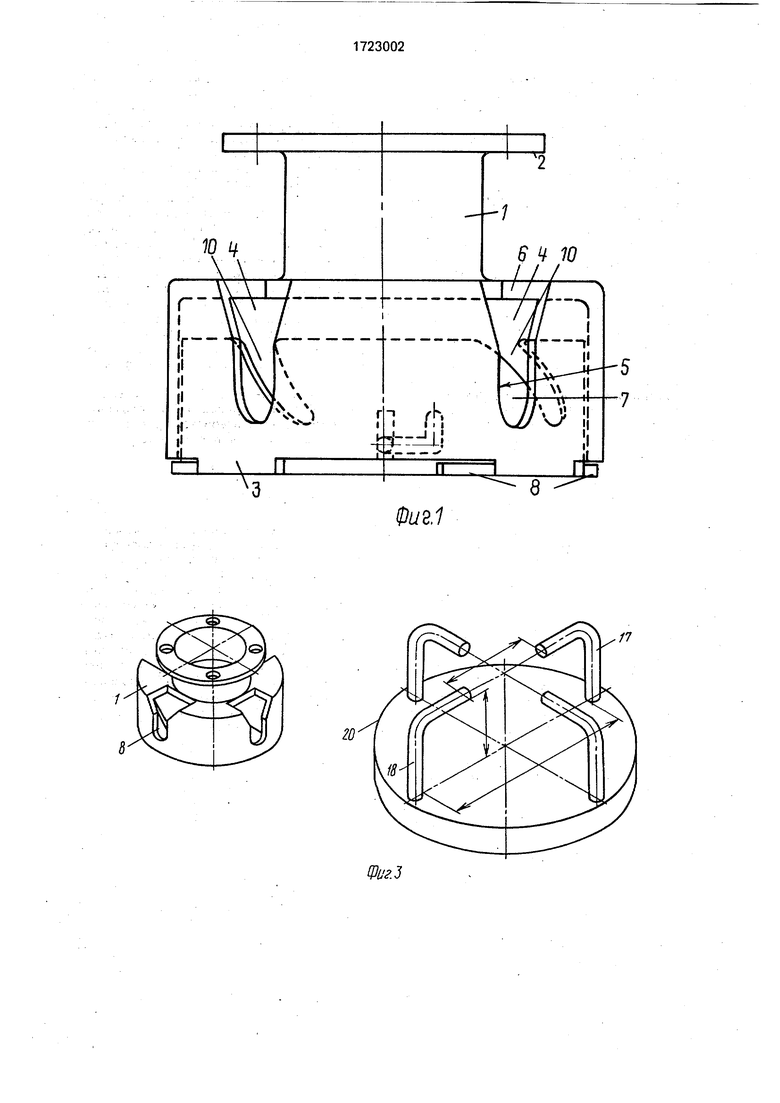
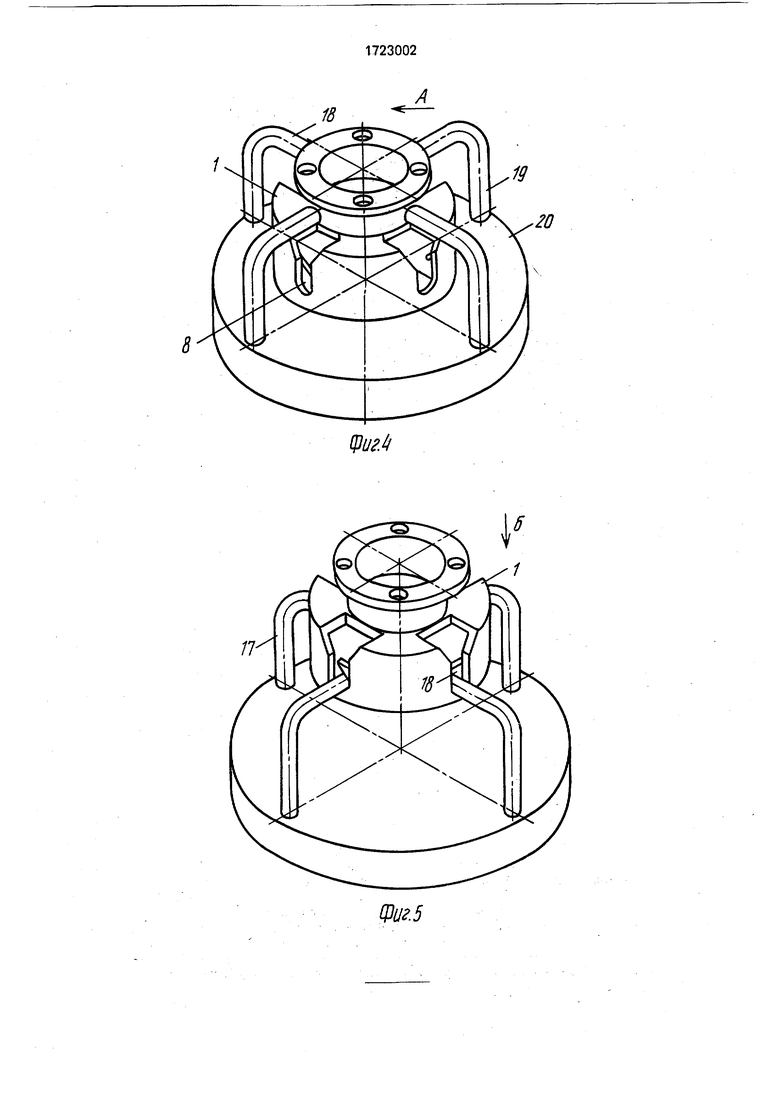
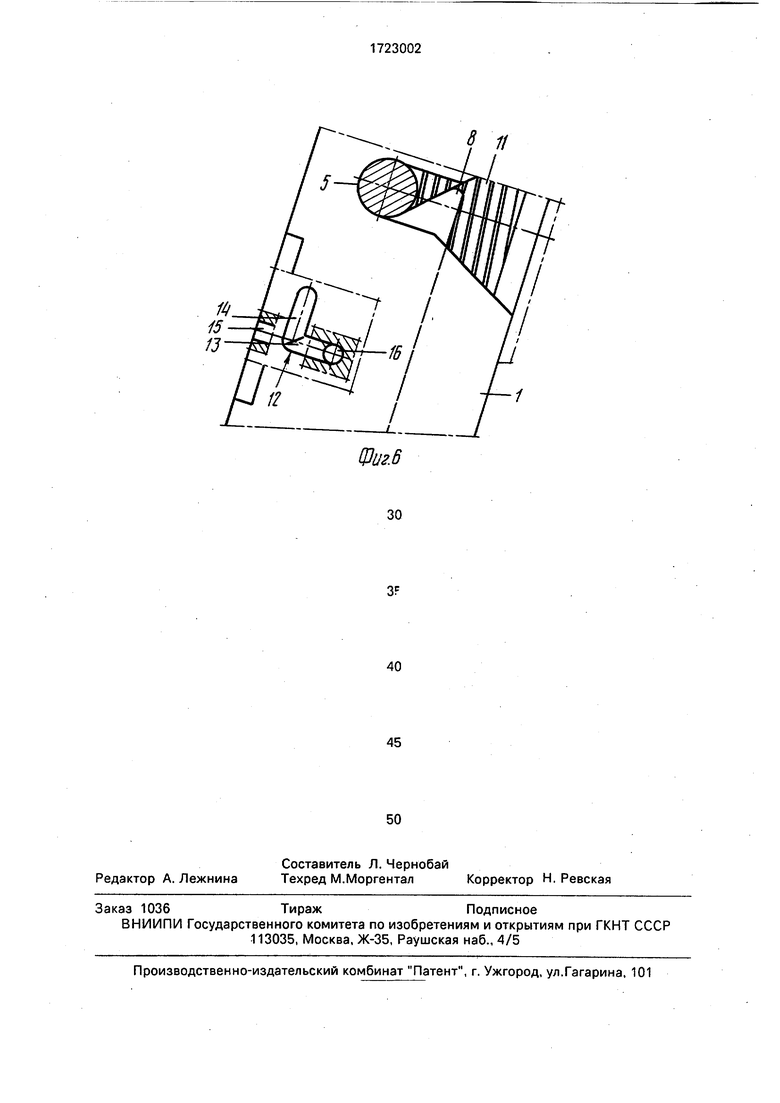
На фиг. 1 изображена грузозахватная система, общий вид; на фиг. 2 - то же, частичный вертикальный разрез; на фиг. 3 - момент завода захватного устройства в строповочные органы груза; на фиг. 4 - мо- мент совмещения вертикальных осей захватного устройства и груза; на фиг. 5 - захватное устройство и груз в рабочем положении; на фиг. 6 - захватное устройство с грузом при повороте от исходного положе- ния более, чем на 90°.
Грузозахватная система содержит захватное устройство, которое включает крышку 1, выполненную в виде стакана, снабженного фланцем 2 с отверстиями для крепления к грузоподъемному механизму. Крышка 1 имеет упор 3, конические расширяющиеся кверху участки 4, вертикальные участки 5 и выемки 6, образующие прорези 7. Захватное устройство также содержит ци- линдрический корпус 8 со ступицей 9 и наклонными пазами 10 на боковой стороне. На ступице 9 расположена пружина 11 кручения, один конец которой закреплен на крышке 1, а другой - на корпусе 8. Верхняя часть наклонных пазов в исходном положении совпадает с участками 4 и 5 сопряжения, а нижняя часть смещена в направлении, противоположном возможному вращению корпуса 8 от исходного поло- жения. Боковая наружная поверхность корпуса 8 снабжена фигурными пазами 12, состоящими из двух участков: вертикального 13 и сопряженного с ним нижней частью горизонтального 14. Внутренняя боковая поверхность крышки 1 выполнена с вертикальным открытым снизу пазом 15, совпадающим в рабочем положении захватного устройства с вертикальным участком 13 паза 12. Между пазами 12 и 15 размещен ша- рик 16. Строповочный орган груза, входящий в грузозахватную систему, включает Г-образные элементы 17с горизонтальными полками 18, направленными навстречу друг другу, и вертикальными пол- ками 19, закрепленными на грузе 20.
Грузозахватная система работает следующим образом.
В исходном положении захватное устройство и груз 20 находятся друг от друга на некотором расстоянии, при этом вертикальный участок 4 прорези крышки 1 и паз 10 корпуса 8 совпадают. Перемещая груз 20 по направлению стрелки А (фиг. 3) или захватное устройство в противоположном стрелке А направлении, или комбинированно - захватное устройство и груз 20 навстречу друг другу, добиваются совпадения их осей (фиг. 4). Неточность совпадения осей компенсируется таким выполнением конических участков 4, при котором при подъеме системы автоматически центрируется груз 20 относительно захватного устройства. Далее груз 20 перемещают по направлению стрелки Б вниз (фиг. 5) или захват в противоположном стрелке Б направлении, или комбинированно - захват вверх, груз 20 вниз, при этом полки 18 Г-образных элементов 17, перемещаясь вдоль участков 4 и 5 прорезей, соприкасаются с наклонными пазами 10 корпуса 8 и, преодолевая сопротивление пружины 11, поворачивают корпус 8 относительно крышки 1 до тех пор, пока Г-образные элементы 18 не повиснут на вертикальных участках 5 крышки 1 (рабочее положение захвата), при этом верхняя часть пазов 10 перекроет участки 4, чем автоматически зафиксирует груз 20 от раскачивания относительно захватного устройства. Внешние возмущающие усилия, действующие на груз 20, можно представить в виде горизонтальной и вертикальной составляющих силы и момента сил, приложенных к Г-образным элементам 17 груза 20. Под действием горизонтальной составляющей силы груз 20 не смещается относительно устройства, так как она прижимает Г-образные элементы 17 к вертикальным участкам 5, что исключает взаимное перемещение. Вертикальная составляющая силы, направленная вниз, также не нарушает взаимного положения груза 20 относительно устройства. Не нарушает фиксацию Г-образных элементов 17 в участках 5 устройства и момент сил, одна из сил которого прижимает часть Г-образных элементов 17 к участкам 5 крышки 1 и к нижней части наклонных пазов 10 корпуса 8, а другая сила, равная по модулю и противоположная по направлению, поднимает остальные Г-образные элементы 17 и действует на верхнюю часть пазов 10 корпуса 8, стремясь повернуть последний и раскрыть участки 5, т. е. расфиксировать Г-образные элементы 17. Однако этого не происходит, так как силы, действующие на нижние и верхние части пазов 10 корпуса 8, равны по величине и противоположны по направлению, а вес груза 20 равномерно распределен между Г-образными элементами, направлен вниз и совпадает по направлению с силой, действующей на нижнюю часть пазов 10, в результате чего усилия на последние увеличиваются, а на верхнюю часть пазов 10 уменьшаются, т. е. при действии
внешнего момента сил на груз 20 усилия, удерживающие корпус 8 в рабочем положении, больше усилий, стремящихся вернуть его в исходное положение. Вернуть корпус 8 в исходное положение, т. е. расфиксиро- вать участки 5, может только усилие/направленное вертикально вверх и большее по модулю веса транспортируемого груза 20, что и имеет место при освобождении устройства от последнего. Освобождение захвата от груза 20 производится перемещением в вертикальной плоскости либо груза 20 вверх, либо захватного устройства вниз, либо комбинированно. При этом Г-об- разные элементы 17 перемещаются вверх относительно участков 4 и 5, а корпус 8 под действием пружины 11 возвращается в.исходное положение.
Не возвратится корпус 8 в исходное положение и при развороте груза 20 от 0 до 90° вокруг любой горизонтальной оси, так как аналогично описанному усилия, удерживающие корпус 8 в рабочем положении, будут больше усилия, стремящегося возвратить его в исходное положение. При дальнейшем развороте груза 20 от 90°до 180° усилия, удерживающие корпус 8 в рабочем положении, станут меньше усилий, стремящихся возвратить его в исходное положение. Это произойдет, когда равнодействующая груза 20 пересечет оси горизонтальных составляющих Г-образных элементов 17 и будет суммироваться с усилиями, действующими на верхнюю часть пазов 10, В этом случае в рабочем состоянии захватное устройство будет удерживать шарики 16 (а не Г-образные элементы 17, как было в положении до 90°), которые при развороте груза более чем на 90° переместятся под действием собственного веса по пазам 13 и 15 во второе крайнее положение, которое окажется ниже чем первое (фиг. 6), и заблокируют корпус 8 относительно крышки 1. При этом захватное устройство надежно удерживает груз даже при развороте его на 180° от исходного положения. При возврате груза из положения 180° к нулю шарики под действием веса возвратятся в первое положение, где благодаря наличию горизонтального участка 14 на корпусе 8 они не будут препятствовать вращению последнего относительно крышки 1. Блокировка возможна только в рабочем состоянии захвата, когда участки 13 и 15 совмещаются и образуют профиль, в котором может перекатываться шарик 16. Во всех других положениях профиль каналами не образуется, шарик 16 не перемещается, что дает возможность взять груз при любом положении
в пространстве его строповочных органов. После заведения строповочных органов корпус 8 проворачивается и образует с вертикальным каналом крышки 1 профиль, чем создается предпосылка для блокировки корпуса 1 с крышкой 8.
Использование изобретения позволяет манипулировать грузом в любом положении в пространстве с разворотом груза на 360° вокруг любой из осей пространства.
Ф о р м у л а и з о б р ете н и я
Грузозахватная система по авт. св. № 1615128, отличающаяся тем, что, с
целью повышения надежности, боковая наружная поверхность корпуса выполнена по крайней мере с одним фигурным пазом, включающим два участка, один из которых расположен вертикально и сопряжен нижней частью с вторым горизонтальным участком, а внутренняя боковая поверхность крышки выполнена с вертикальным открытым снизу пазом с возможностью сопряжения с участком фигурного паза корпуса, при
этом захватное устройство снабжено шариковым фиксатором, размещенным в фигурном пазу корпуса и с возможностью захода в вертикальный паз крышки.
щ.
S 4 Ю
ii/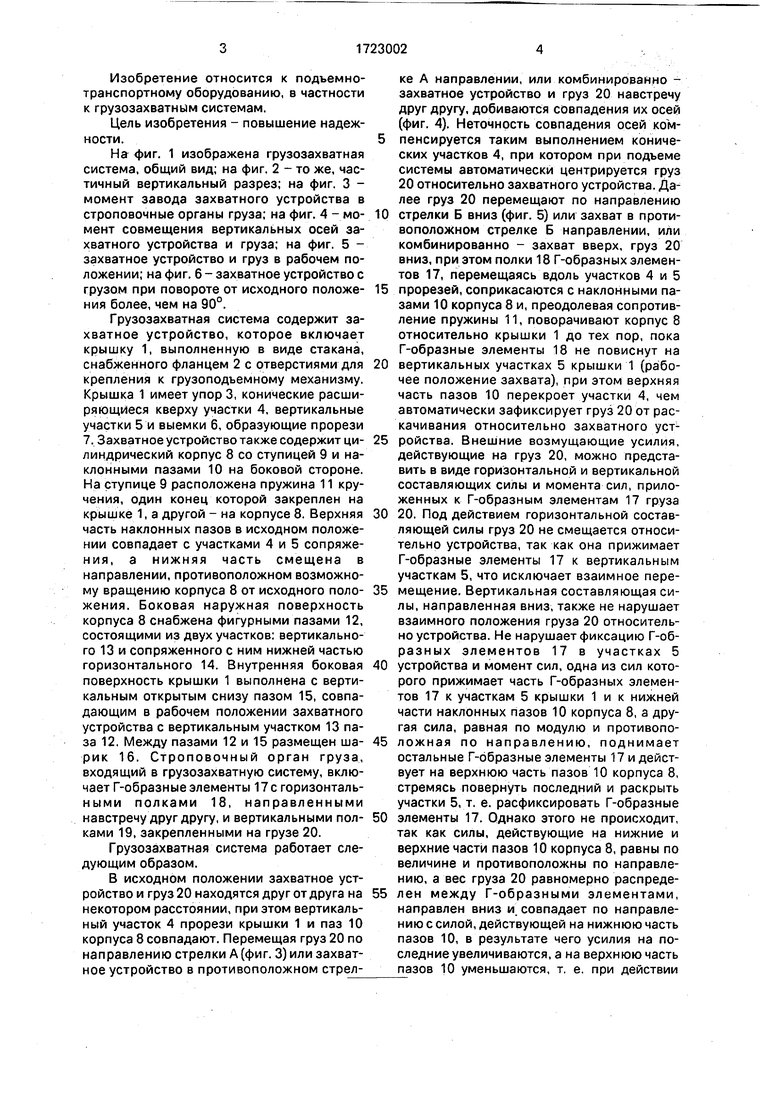

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная система | 1988 |
|
SU1615128A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Грузозахватное устройство | 1985 |
|
SU1301761A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| Захват для грузов | 1988 |
|
SU1601069A1 |
| Грузозахватное устройство | 1988 |
|
SU1594113A1 |
| Грузозахватное устройство | 1990 |
|
SU1744033A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
Изобретение относится к подъемно- транспортному оборудованию. Цель изобретения - повышение надежности. Грузозахватная система содержит захватное устройство, которое включает крышку 1. Внутренняя боковая поверхность крышки выполнена с вертикальным открытым снизу пазом 15 с возможностью сопряжения с участком фигурного паза 14 корпуса 8. При этом захватное устройство снабжено шариком 16, размещенным в пазу 14 и с возможностью захода в вертикальный паз 15 крышки 1. 6 ил.
ЛS
Фи&1
гооеш
Фиг.6
| Грузозахватная система | 1988 |
|
SU1615128A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
