(Л
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации курса судна | 1987 |
|
SU1529182A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| Устройство для управления курсом судна | 1984 |
|
SU1227546A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ ПРИ РАЗВИТОМ МОРСКОМ ВОЛНЕНИИ | 2008 |
|
RU2368536C1 |
Изобретение относится к управлению движением морских судов, в том числе и их стабилизации в заданной точке мирового океана. Цель изобретения - повышение надежности системы. Для достижения цели в системе использованы в качестве измерителей состояния судна датчики рассогласования угла по курсу, задатчик продольной линейной скорости судна, датчик скорости хода судна и акселерометр, сигналы которых формируют закон полуавтоматического управления с переменным коэффициентом усиления, последний формируется в блоке коррекции коэффициента передачи в канале движителей. Кроме того, введены также два амплитудных ограничителя, ослабляющих загрузку исполнительных органов при сильном волнении на море. 1 ил.
Изобретение относится к управлению движением морских судов и разделу стабилизации положения поисковых и буровых судов в заданной точке мирового океана.
Целью изобретения является повышение надежности системы.
Суть изобретения сводится к разработке упрощенной, но работоспособной системы полуавтоматического уп- равления и используемой при вькоде из строя автоматической СДС (системы динамической стабилизации).
Предложенная полуавтоматическая система управления (стабилизации) . лоложения судна имеет закон управления (рассмотрим канал продольного движения судна):
Р K(K,V KjVy3+ ), (1):
где К,-К4 - const, К 04 или
X
)Г9
Vx - Р« скорость движения судна в продольной плоскости истинная и заданная; ускорение движения судна; величина упора движителей;
С«3 - угловая скорость судна в горизонтальной плоскости (скорость рыскания) ; скорость движения судна в поперечной плоскости.
V,.
о: ел
О)
00
Введение сигналов ускорения V,
V)( и.
скорости Vy для повышения качества работы системь стабилизации необходимо, а с точки зрения загрузки привода исполнительных органов использование их при сильном волнении недопустимо. (Если вводить квазиопти мальиые оценки этих сигналов, кроме сильного усложнения системы, это при« |водит к ухудшению качества стабилиза- Ции, появлению низкочастотных автО колебаний).
Предложено ограничивать по ампли туде измеренные сигналы V и Vj. Ве« аичина ограничения выбирается так, чтобы при спокойном море не дости гать этих уровней, а при сильном вол нении ограничивать величину управляю него воздействия на исполнительные приводы в допускаемых по загрузке 1ределах, Кроме того, предложено
звести логическую перестройку закона 5шравления в зависимости от того, совпадает знак ускорения и величины этклОнения судна или нет, I Перестройка осуществляется диск Ьетно путем изменения величины фициента К в зависимости (1):
К С, при sign V sign ДХ}
, (2)
I К Cg при sign V ji sign Д X,
tfle С (
I Д X величина рассогласования по
I курсу судна.
Введение такой логической пере стройки позволяет ослабить воздейст (ие ускорения и, скорости изменения координаты положения судна на привод движителя, когда судно само двигает :я к положению равновесия, и допол пительно ускорять этот процесс не следует,
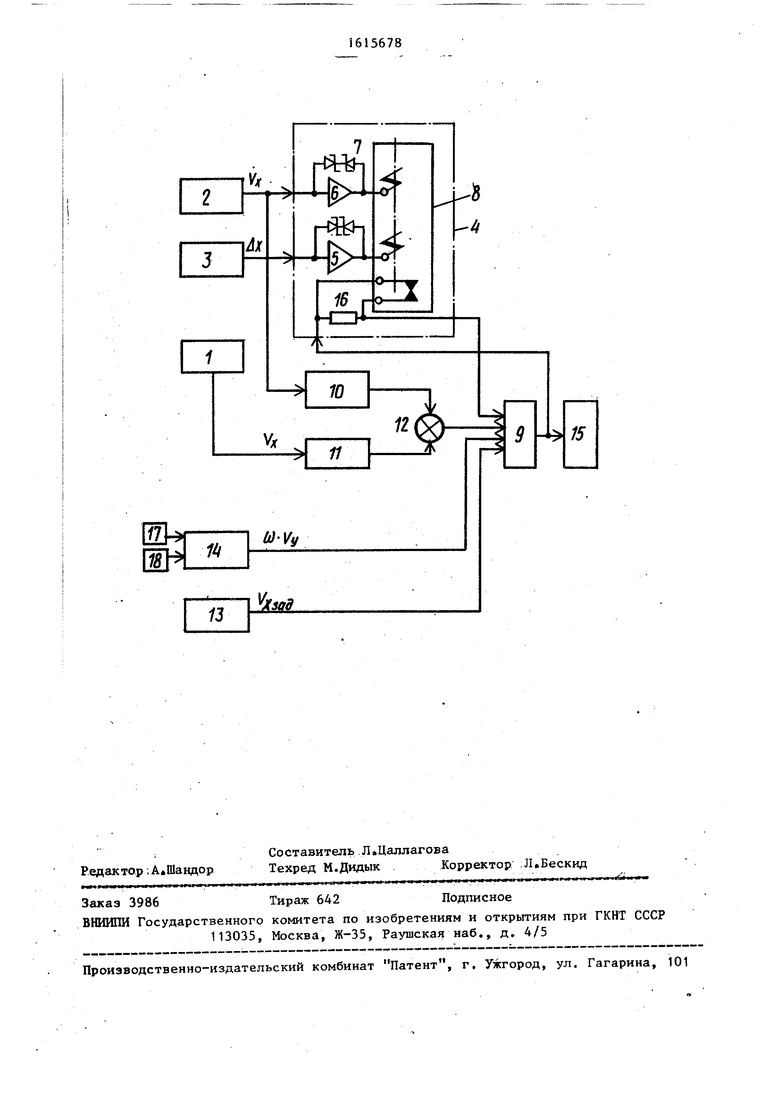
I На чертеже приведена функцибнапь - йая схема (продольного канала стаби- j|изaции судна) предложенной системы,
I Система содержит датчик 1 скорое- ф1 движения судна, акселерометр 2, ;,атчйк 3 рассогласования угла по кур су (по положению судна в продольном tаправлении), блок 4 коррекции коэф (5ициента передачи в канале движителей содержащий операционные усилители 5 Ц 6, четыре стабилитрона 7 и реле 8, Йервьй сумматор 9, амплитудные огра 11ичители 10 и П, второй сумматор 12, задатчик 13 продольной линейной с корости судна, блок 14 умножения (угловой скорости судна в горизонтальК|ОЙ плоскости и скорости судна в ПО
п еречном направлении), исполнительньш фган 15 главных движителей судна, р1езистор 16, датчик 17 угловой скорости судна, датчик 18 поперечной Линейной скорости судна.
с
ю 5
0
5
5
0
5
5
Система работает следующим образом.
При воздействии внешних возмуще- t НИИ на судно на выходе акселерометра 2, датчика 1 скорости движения судна появятся соответствующие сигналы, которые поступят через амплитудные ог раничители 10 и 11 на второй сумматор 12, и далее - на вход первого сумматора 9, на выходе которого вырабатывается усиленный пропорциональный сигнал для управления исполнительным органом. При этом создается управляющее воздействие, которое частично скомпенсирует воздействие внешнего возмущения на судно. Оператор, в зависимости от величины появившегося сигнала рассогласования в датчике 3, задатчиком 13 скорости введет дополнительное смещение исполнительного органа 15 и заставит тем самым вернуться судно в прежнее заданное положение, после чего снимет дополнительное задание скорости хода судна через задатчик 13,
При сильном волнении сигналы с датчиков 1 и 2 будут иметь по амплитуде недопустимьй уровень, для ограничения их предельно допустимой амплитуды используются амплитудные ограничители 10 и 11, Это позволит несколько разгрузить привод исполни- тельных органов от высокочастотных компонент внешних возмущений.
Для дополнительной разгрузки привода исполнительных органов 15 введен блок 4, который работает следующим образом. При совпадении знаков ускорения Vjj и рассогласования Дх оба сигнала проходят через первый 5 и второй 6 операционные усилители, на выходах которых вырабатываются два одинаковых сигнала. Эти сигналы поступят на входы двух обмоток реле 8, что приведет к срабатешанию последнего и размыканию нормальна разомкнутых контактов реле 8, а следовательно, к подключению резистора 16, Это приведет к усилению управляющего воздействия. При разных знаках сигналов Vy и ДХ реле отключится и в цепи отрицательной обратной связи второго сумматора 9 отключится дополнительньй резистор 16, что пр и- ведет к сильному ослаблению суммарного управляющего сигнала,:т,е, при состоянии, когда судно под действием внешнего возмущения само движется к заданному положению, привод нс полнительных органов на эти воздейст ВИЯ практически не реагирует.
В работе продольного канала использовано также и компеисационное управлякщее воздействие из поперечного и углового каналов движения судна. Для этого Формируется сигнал в блоке 14 умножения в виде произведе- иия сигнала угловой скорости (и)), поступающего с датчика угловой скорости судна, и сигнала поперечной линейной скорости судна (Vn), поступающего с датчика поперечной линейной скорости судна
16
Формула
изобретения
Система динамического позиционирования судном, содержащая датчик скорости движения судна, датчик рассогласования угла по курсу, акселерометр, первый сумматор, подключенный выходом к входу исполнительного органа главных движителей судна.
1615678
0
блок умножегмя, подключенный входами к.выходам соответственно датчика- угловой скорости судна н датчика попе речной линейной скорости судна, а выходом - к первому входу первого сумматора, отличающаяся тем, что, с целью повыщения надежности системы, она содержит задатчик продольной линейной скорости судна, амплитудшле ограничители, второй сумматор и блок коррекции коэффициента передачи в канале движителей, первый и второй входы которого подкгао- чецы к шлходам соответственно акселерометра и датчика угла рассргласова- ния по курсу, третий вход - к выходу первого сумматора, д выход - к второму входу первого сумматора, соеди- 0 ненного третьим входом с выходом второго сумматора, а четвертым входом - с выходом задатчика продольной линейной скорости судна, причем вы ход акселерометра и выход датчика скорости движения судна через соответствующие амплитудные ограничители подключены к входам второго сумматора.
5
5
15
