Изобретение относится к вычислительной технике, может быть исполь- .зовано для сопряжения мини- и микро- ЭВМ и является усовершенствованием устройства по авт. св. № 1348874.
Цель изобретений -г расширение об- лдсти применения устро:%ства за счет переменной идентификации адресов, используемых в качестве кодов опе.ра1гий, определяющих алгоритм передачи данных между сопрягаемыми ЦВМ.
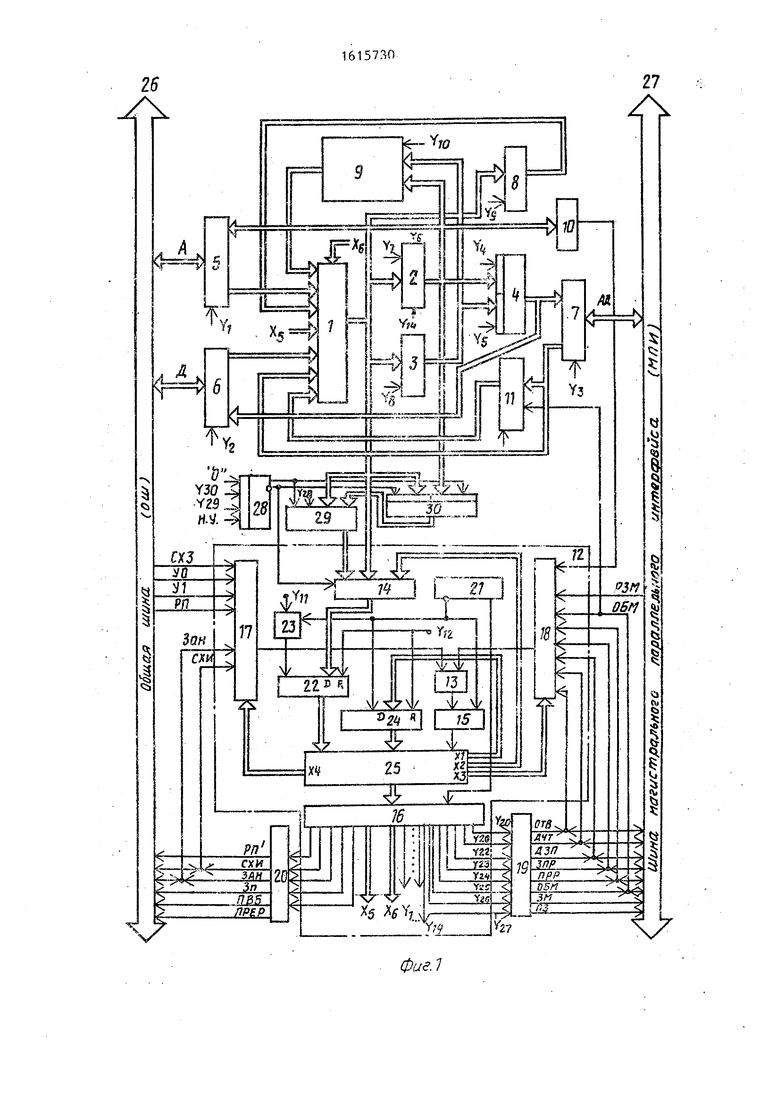
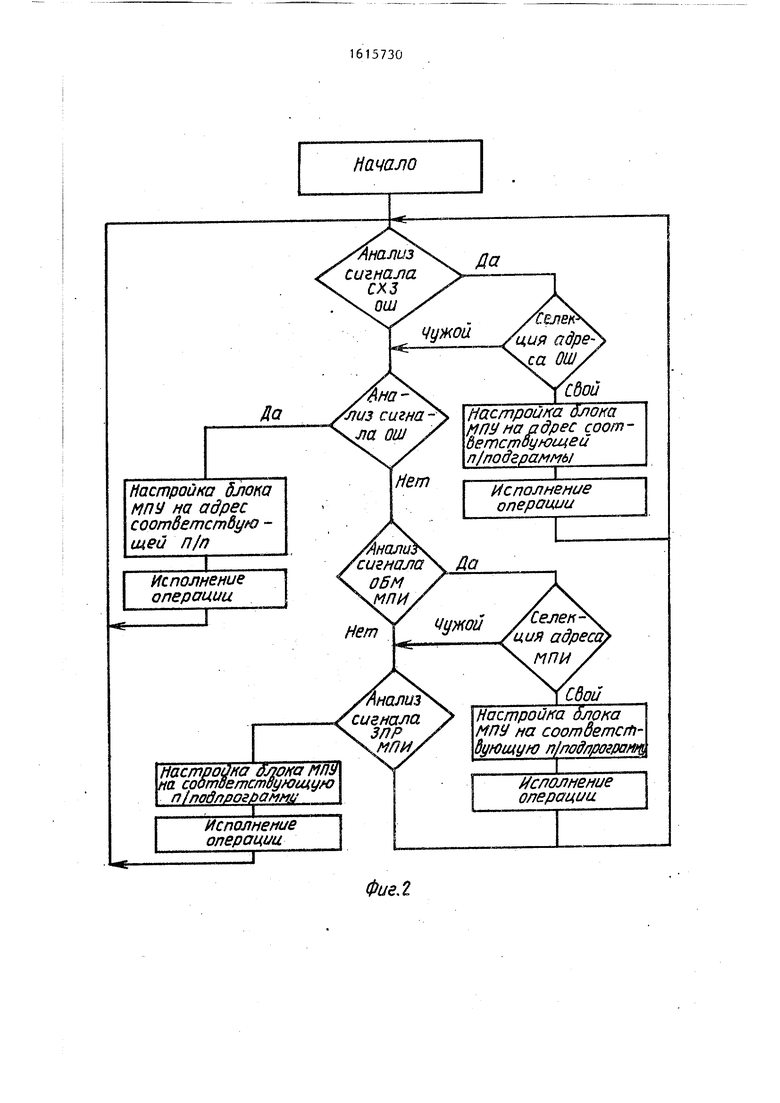
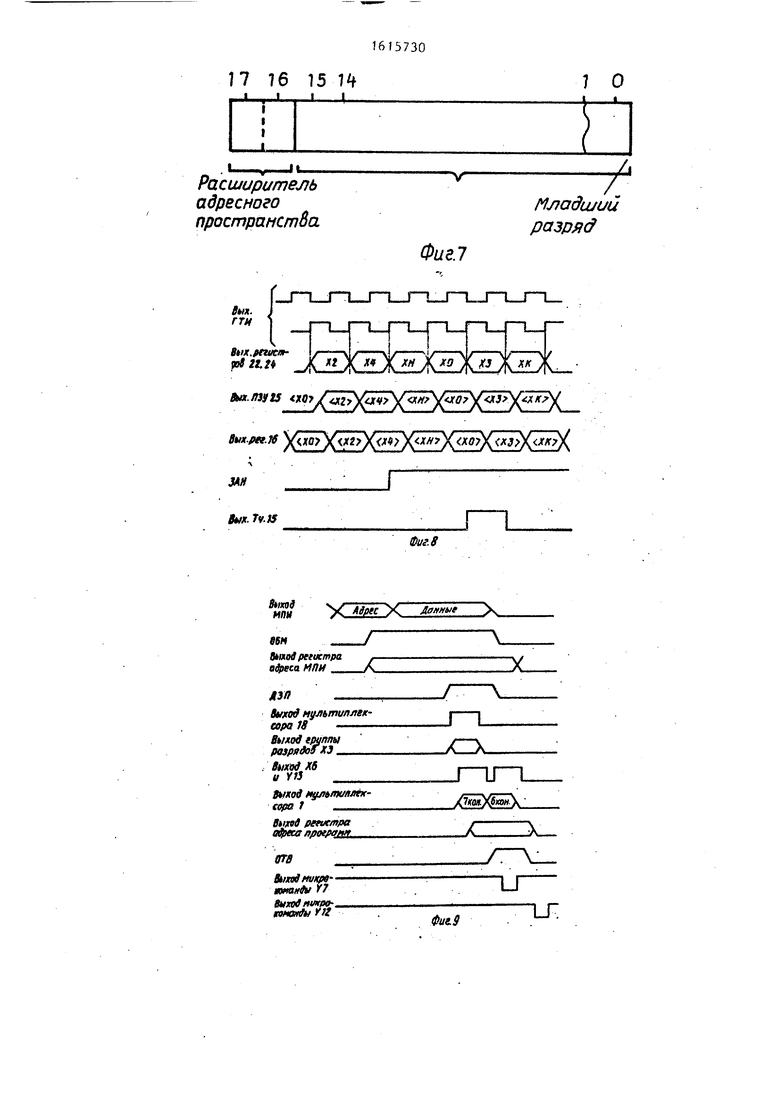
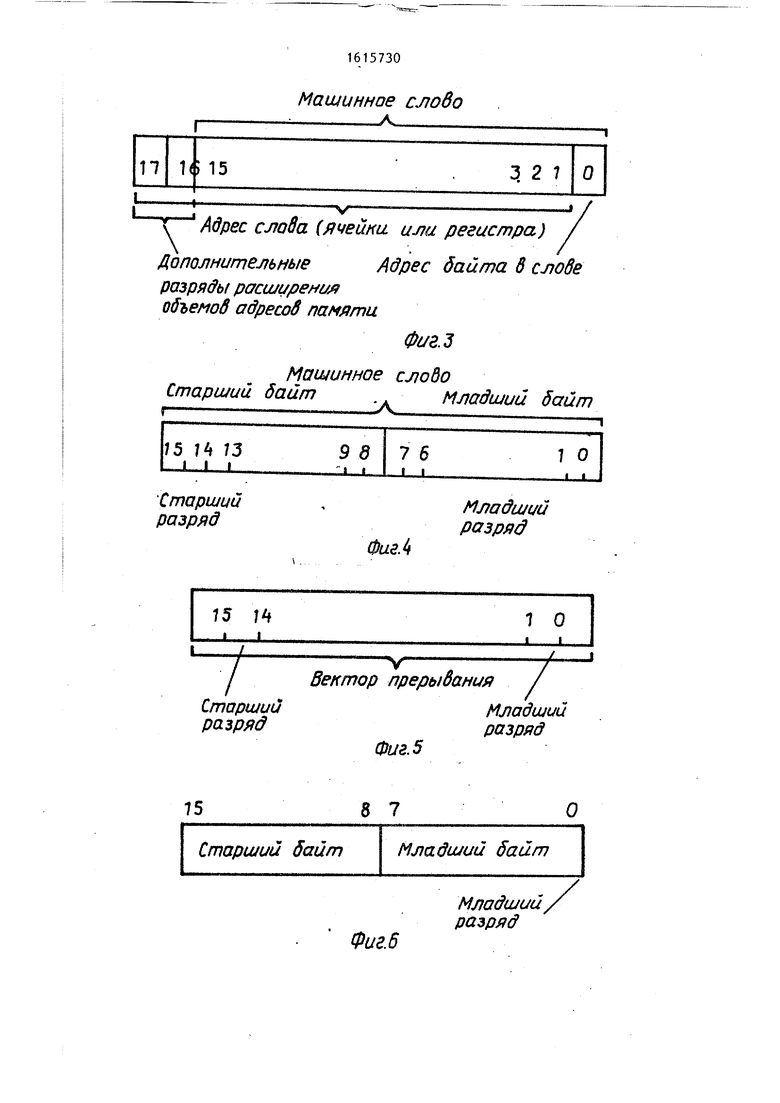
На фиг. 1 представлена функциональная схема устройства для сопряжения магистралей; на фиг. 2 обобщенный рабочий алгоритм устройства; на фиг. 3 - формат представления адреса подшины адреса ОЫ; на фиг. 4 - формат представления данных подшины данных ОШ; на фиг. 5 - формат представления
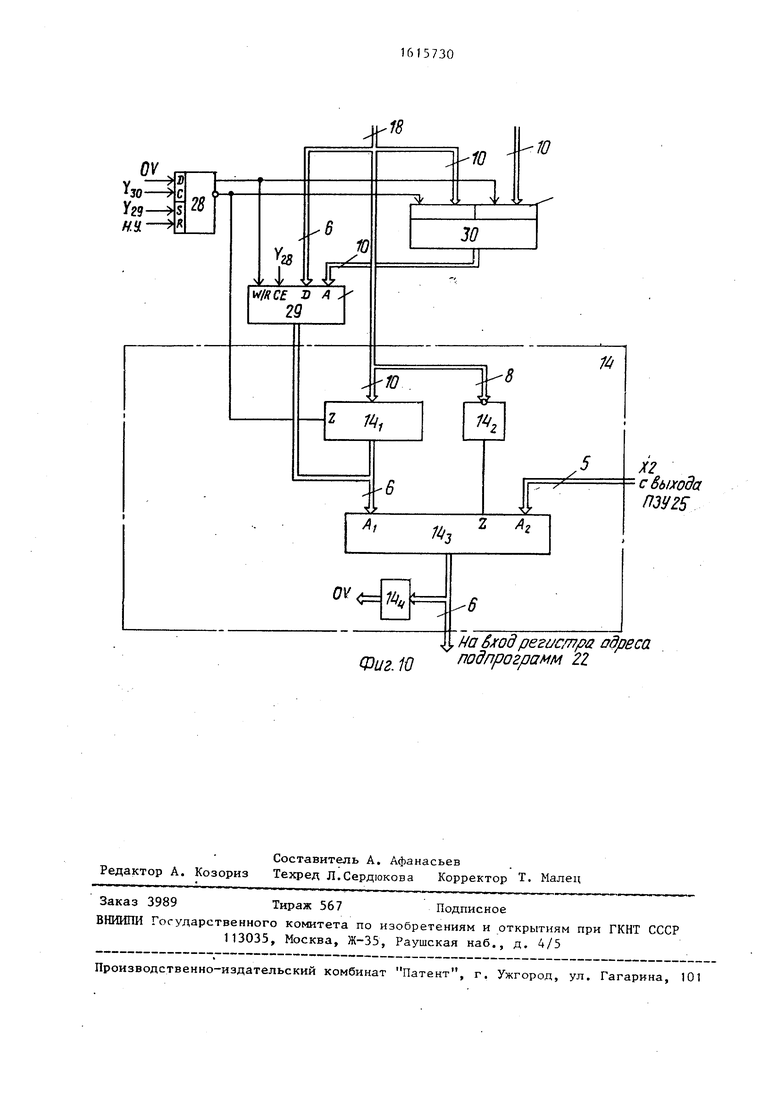
вектора прерьюания программ ОШ; на фиг. 6 - форма представления данных на МПИ; на фиг. 7 - формат представления адреса на ЯШ; на фиг. 8 - временная диаграмма блока микропрограммного управления; на фиг. 9 - временная диаграмма обмена с МПИ; на фиг, 10- функциональная схема селектора адреса. Устройство для сопряжения магистра- лей (фиг. 1) содержит мультиплексор 1, .регистр 2 адреса, регистр 3 данных, ;группу элементов И-ИЮ 4, три группы шинных формирователей 5-7, регистр 8 вектора прерываний, оперативное запоминающее устройство (ОЗУ) 9, эле- :мент И 10, р.егистр Г1 адреса МПИ,- блок 12 MiiKponporpaMMHoro управления, содержаш-нй элемент РШИ 13, селектор 14 адреса, триггер 15 адреса, регистр
и
Oi
01
ч
оо
м
16 микрокоманд, два мультиплексора 17 и 18, две группы передатчиков 13 и 20, генератор 21 тактовых импульсов, регистр 22 адреса программ, элемент И 23, регистр 24 адреса микрокоманд, постоянное запоминающее устройство (ОЗУ) 25, а также общую шину (ОШ) 26 и шину 27 магистрального параллельноных) в случаях, когда ройство работает в ка теля;
Y16 - микрокоманд сигнал ЗАН, указывая, сопряжения в режиме з
Y17 - микрокоманда сигнал ЗП (запрос на
f ---V. .. .jj ij-j IJlt-JIiSrH -ч- 4. J.VJ.IJ1. . -3 rlcl
ГО интерфейса (МПИ), триггер 28 COCTO-IQ шины для прерывания);
.- у - ff.j. л. - L-V- V J.
яния, блок 29 памяти (селектор) оперативного адреса и группу элементов И-ИЛИ 30.
Устройство для сопряжения магистралей обеспечивает сопряжение двух одновременно работаю1 щх микро-и мини- ЭВМ.
Назначение микрокоманд, формируемых блоком микропрограммного управления, следующее:
30
Y1, Y2 и Y3 управляют работой шин ных формирователей, при этом, если Y; О (где i 1, 2, 3), передача информацией осуществляется от шин к мультиплексору 1, если Y; 1, пере- 25 дача информа1дии - от шинного формирователя на соответствующие шины;
Y4 и Y5 осуществляют управление группой элементов И-ИЛИ 4 соответственно ее левым и правьм плечами с целью коммутации адресной и числовой информации на вход шинного формирователя ;
Y6 осуществляет инкремент начального адреса ОЗУ, зафиксированного на регистре 2 адреса;
Y7, Y8 и Y9 осуществляют запись информации соответственно в регистр 2 .адреса, регистр 3 данных и регистр 8 вектора прерывания 8;
Y10 осуществляет управление работой ОЗУ, при этом, если Y10 О, ОЗУ работает в режиме считывания информации, если Y1U 1, производится запись информации в ОЗУ;
Y11 осуществляет управление работой элемента И 23 с целью вьщеления синхронизирующего сигнала на регистр 22 адреса программ 22;
Y12 осуществляет сброс в О содержимого регистра 22 адреса программ и регистра 24 адреса микрокоманд;
Y13 осуществляет сброс в О содержимого регистра МПИ 11;
Y14 осуществляет декремент адреса ОЗУ, зафиксированного на регистре адреса;
Y15 - микрокоманда, имитирующая сигнал СХИ (управление передачей данY18 - микрокоманда сигнал иВБ (подтвержд ни-я);
Y19 - микрокоманда J5 сигнал ИРЕР (сигнал в тора прерывания на ОЫ
Y20 - микрокоманда сигнал ДЧТ на КПИ;
Y21 - микрокоманда 20 сигнал ПРР на М1Ш;
Y22 - микрокоманда сигнал ОТВ на КПИ;
Y23 - микрокоманда, сигнал ЗПР на МПИ;
Y24 - микрокоманда, сигнал ДЗП на МПИ;
Y25 - микрокоманда, сигнал ОБМ на МПИ;
Y26 - микрокоманда, сигнал ЗМ (запрос прям на МПИ;
Y27 - микрокоманда, сигнал. ПЗ на МПК;
Y28 - микрокоманда, на первый управляющий 29 оперативного адреса
Y29 - микрокоманда, на установочный вход т состояния;
Y30 - микрокоманда, на управляющий вход тр стояния;
XI - группа разрядо ющая адресацию микроком ответствующей функ1диона мы;
Х2 - группа разрядов ющая адресацию подпрогр ствии адреса, задаваемо 50 ьпс подшин общей шины и Х4 - группы разрядов, о управление (коммутацию) рами 18 и 17;
Х5 - группа разрядов кнцая значению вектора п грамм;
Х6 - группа разрядов щих управление (коммута лшексооом 1,
40
45
ных) в случаях, когда согласующее устройство работает в качестве исполни- теля;
Y16 - микрокоманда, имитирующая сигнал ЗАН, указывая, что устройство сопряжения в режиме задатчика;
Y17 - микрокоманда, имитирующая сигнал ЗП (запрос на использование ши-ч- 4. J.VJ.IJ1. . -3 rlcl
шины для прерывания);
-IQ шины для прерывания);
30
25
Y18 - микрокоманда, имитирующая сигнал иВБ (подтверждение прерыва- ни-я);
Y19 - микрокоманда, имитирующая J5 сигнал ИРЕР (сигнал выставления вектора прерывания на ОЫ);
Y20 - микрокоманда, имитирующая сигнал ДЧТ на КПИ;
Y21 - микрокоманда, имитирующая 20 сигнал ПРР на М1Ш;
Y22 - микрокоманда, имитирующая сигнал ОТВ на КПИ;
Y23 - микрокоманда, и штиpyющaя сигнал ЗПР на МПИ;
Y24 - микрокоманда, имитирующая сигнал ДЗП на МПИ;
Y25 - микрокоманда, имитирующая сигнал ОБМ на МПИ;
Y26 - микрокоманда, имитирующая сигнал ЗМ (запрос прямого доступа) на МПИ;
Y27 - микрокоманда, имитирующая сигнал. ПЗ на МПК;
Y28 - микрокоманда, поступающая на первый управляющий вход селектора 29 оперативного адреса;
Y29 - микрокоманда, поступающая на установочный вход триггера 28 состояния;
Y30 - микрокоманда, поступающая на управляющий вход триггера 28 состояния;
XI - группа разрядов, обеспенива- ющая адресацию микрокоманд внутри соответствующей функ1диональной программы;
Х2 - группа разрядов, обеспечивающая адресацию подпрограмм при отсутствии адреса, задаваемого от адрес- 0 ьпс подшин общей шины или МПИ; ХЗ и Х4 - группы разрядов, обеспечивающие управление (коммутацию) мультиплексорами 18 и 17;
Х5 - группа разрядов, соответству- кнцая значению вектора прерывания программ;
Х6 - группа разрядов, обеспечивающих управление (коммутацию) мульти- лшексооом 1,
0
5
Устройство предназначено для связи
одновременно работающих миниЭВК (типа СМ-4), имею1цих интерфейс Общая шина, и микроэвм, имеющих магистрали ный параллельньш интерфейс (КПИ), используемьм в качестве стандартного средства обмена с перифийными устройствами.
В магистрали Общая шина адрес и данные передаются параллельно по раздельным линиям связи, а в КПИ адрес и данные передаются по совмещенным линиям связи. Отличаются также и временные диаграммы управляющих сиг- налов в циклах обмена данными, прерывания и захвата магистрали.
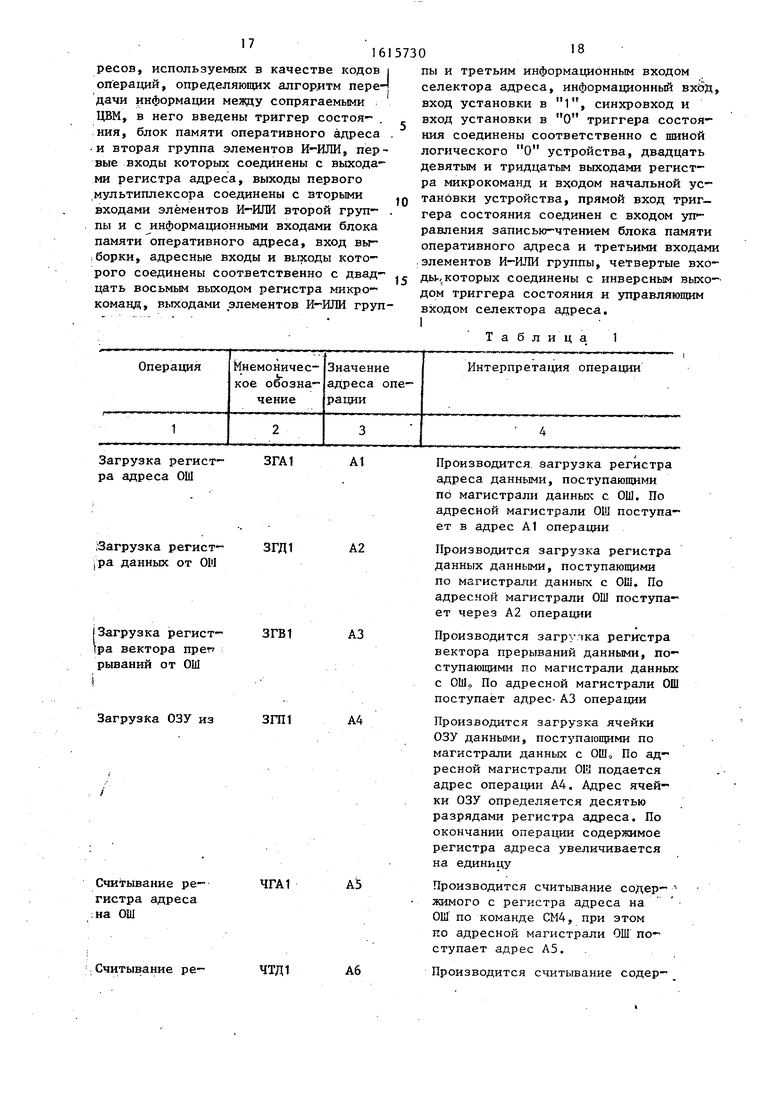
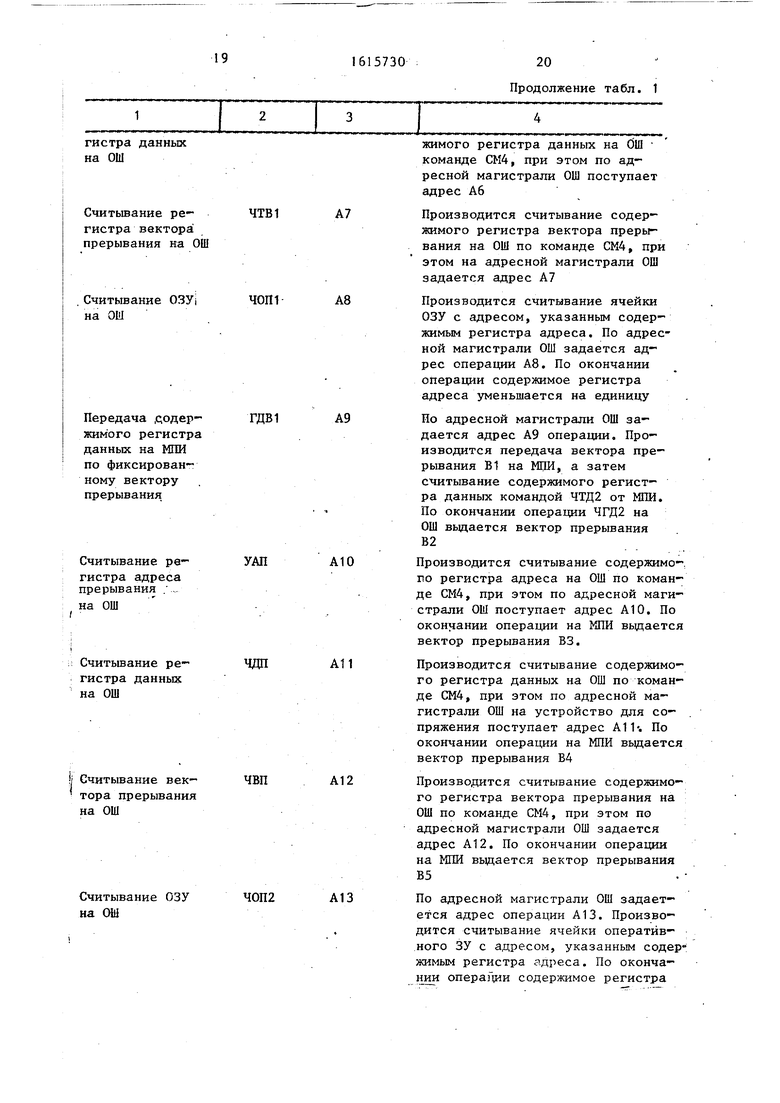
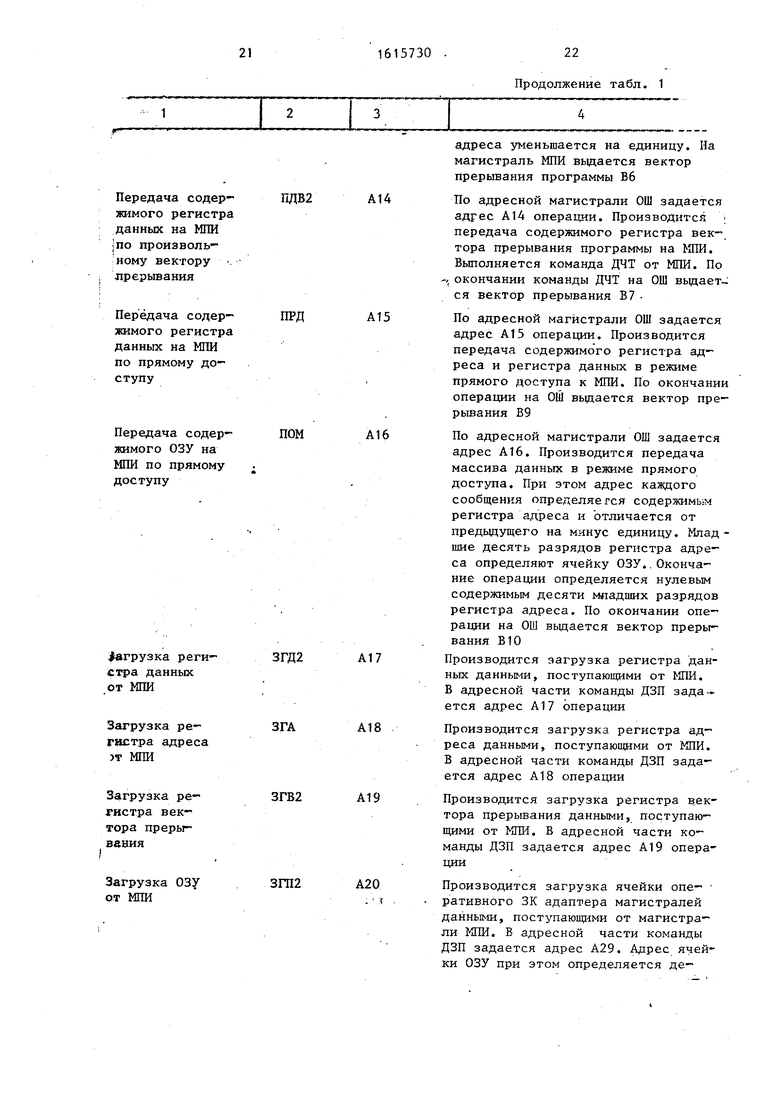
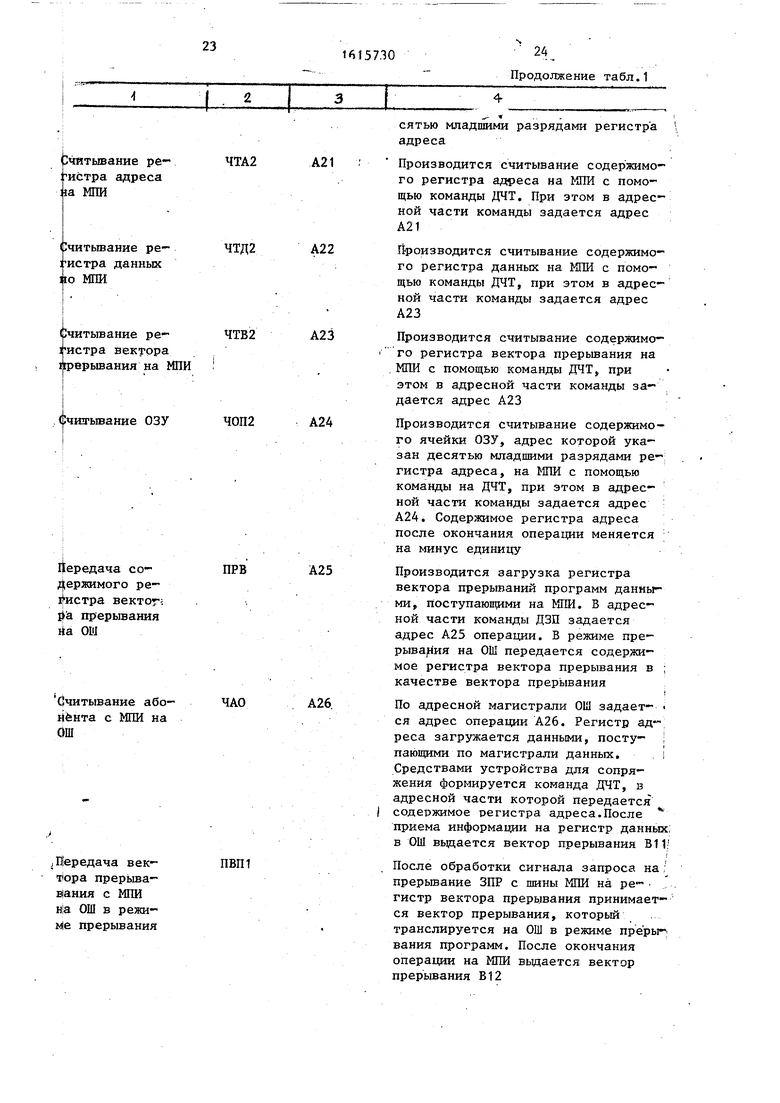
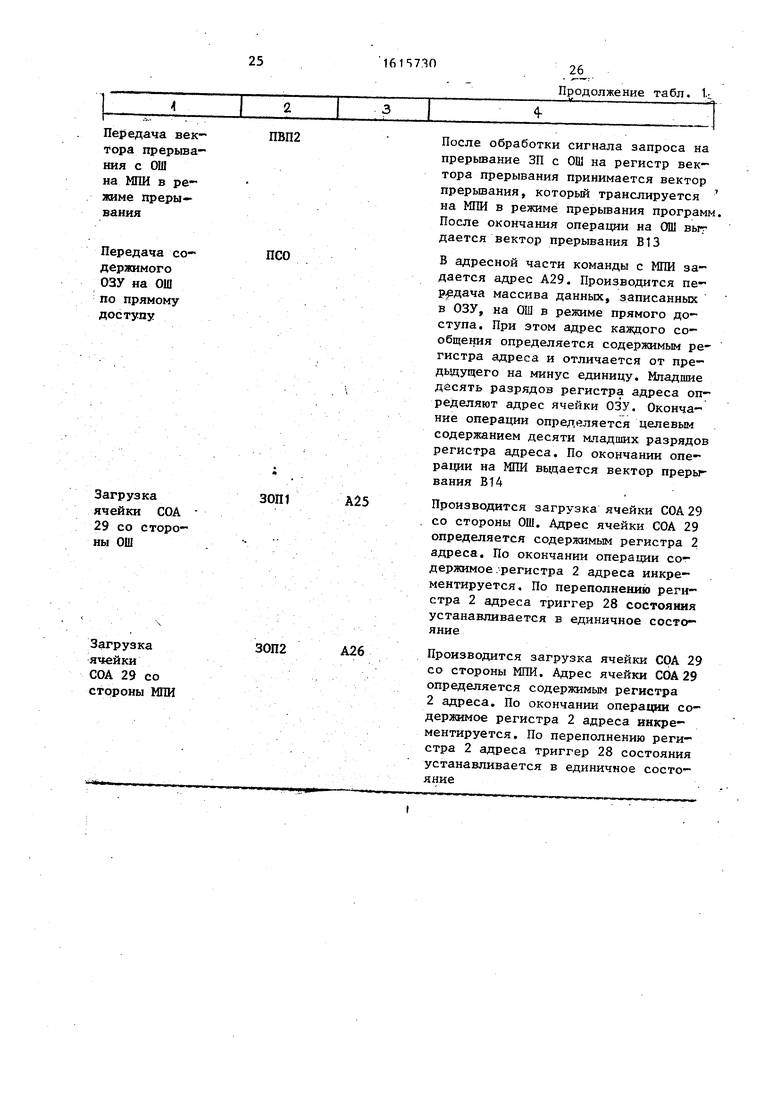
В табл. 1 приведен примерный ряд операций, которые могут быть выполнены устройством сопряжения. Функцио- нальные программы этик операций составляют библиотеку, занесенную в накопитель микропрограмм.
Пользователь может изменять эти операции или дополнять их списочньш состав (до 60 операций) путем измерения содержимого ПЗУ 25, Настройка на вьшолнение операций производится
селектором 14 адреса, в котором занесены значения начальных адресов функциональных подпрограмм, обслуживающих загрузку селектора оперативного адреса, и информация табличного типа для преобразования кодов, поступающих с выхода селектора опера.тивного адре- са, и кода Х2, поступающего с выхода ПЗУ 25. Работа селектора 14 адреса поясняется функциональной схемой, представленной на фиг. 10.
Идентификация адреса функциональной подпрограммы в ппоцессе работы производится через коды, загружаемые пользователем в селектор оперативного адреса по соответствующему адресу.
Рассмотрим процесс настройки устройства на выполнение определенной операции.
При выполнении указанных в табл. 1 операций устройство для сопряжения ЭВМ обеспечивает: обработку сигналов синхронизации и управления МПИ и общей шиной; мультиплексирование адреса и данных, передаваемых из общей шины в МПИ, при этом обеспечивается обработка запросов в соответствии с определенной дисциплиной приоритета обработки запросов на доступ к устройству для сопряжения; разделение адреса и данных, передаваемых из МПИ
в общую шину; прием и обработку векторов прерываний из МНИ и из об- щей шины; формирование фиксированных векторов прерываний на общую шину или ЯШ.
Преобразование сигналов синхронизации и управления .и аналогичных сигналов ШИ производится блоком мик- программного управления Процесс преобразования сигналов состоит из обнаружения (опроса) этих сигналов, формирования сопутствующих сигналов на внутренних магистралях устройства, т,е, сигналов, обеспечивающих выполнение соответствующих микроопераций, например, регистрации (записи) адреса, данных, вектора прерываний и т.д. формирование ответных сигналов, а также формирование квитируюиих (ответных сигналов на приемной (передающей) магистрали.
Как видно из табл. 1, команды уст20
30
35
40
роиства для сопряжения магистралей 25 не носят характер специально выраженного формата, а представляются фиксированными адресами в формате, принятом для представления адресной информации в СМ4 (фиг. 3). Данные от общей шины подаются по подшине данных (фиг. 4) общей шины.
Передача данных на общую шину осу ществляется двумя операциями: ЧТС и ЗПС. При ЧТС запрашивается шина /.щя передачи информации от исполнителя к задатчику, т.е. от устройства для сопряжения к СМ4 информа1щя передается полным (16-разрядным) словом Управление выполнением операциями ЧТС и ЗПС производится согласно временной диаграмме обмена интерфейса ОШ. Операция ЗПС используется для передачи информа1щи от задатчика к исполнителю т.е. от СМ4 к устройству для сопряжения по адресу, указанному разрядами А Г17 - 0 0. Данные при этом помещаются исполнителем на подшину Д И 5 00.
При выполнении некоторых операции устройство для сопряжения вьщает на ОШ и МПИ векторы прерывания. При этом упр вление обменом ведется стандарт- ным для каждой из 1Ш{Н способом, а вектор прерывания программ размещается в 15 - 0 0J разрядах подшины данных при передаче его на ОШ 7-0 0 разрядах при передаче его нл lПPi. Форматы представления адресов, данных и векторов прерывания программ
45
50
55
по ишнам ОШ, МПИ и представление информации на игине КПИ приведены соответственно на фиг. 3-7.
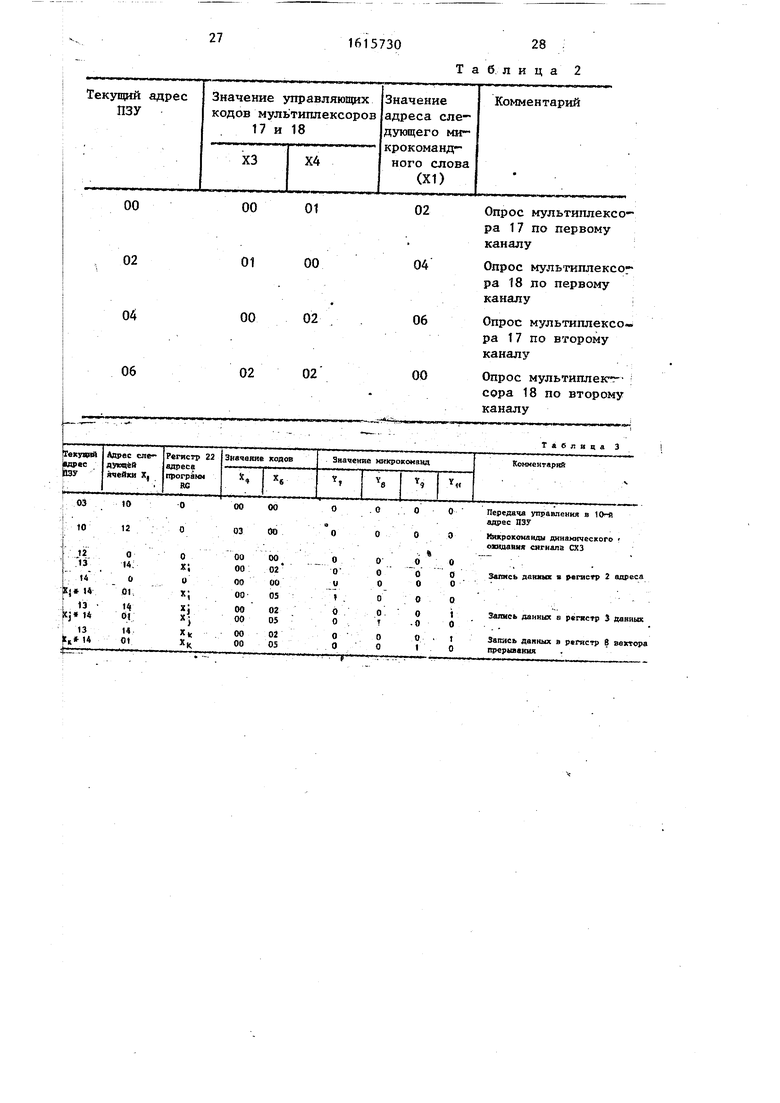
Рассмотрим работу блока 12 микропрограммного управления и режиме поиска и обработки сигналов запроса на доступ к устройству для сопряжения от общей шины и МПИ Пусть эти сигналы подсоединены на первьм и второй входы мультиплексоров 17 и 18, приче на первые входы будут: подключены сигналы непосредственного доступа на считывание или запись, а на вторые - I сигналы доступа на прерывание. I . Последовательность опроса мульти- плексоров определяет дисциплину(по- Iрядок) обработки запросов. I В табл. 2 приведен пример реализа- 1ции подпрограммы поиска и обработки запросов, а также вариант программы поиска запросов, которые расставлены по приоритету следующим образом: ЗАН |ОБМ, 311, ЗПР.
I Как видно из табл. 2,в первых ячей |ках ПЗУ 25 с четными адресами програм :мируются коды ХЗ И Х4, обеспечивающие последовательный-опрос мультиплексоров 19 и 17 по соответствующим лам. Однако могут быть и другие дне- циплины обработки запросов в случае изменения подпрограммы. Формирование динамических кодов ХЗ и Х4 опроса магистралей производится с ПЗУ из начального состояния регистра 22 адре- ;са программ регистра 11 адреса микрокоманд, а также триггера 15 адреса.
Начальным состоянием блока микропрограммного управления считается такое состояние, при котором на адрес- ных входах блока ПЗУ 25 - нули. Обнуление блока микропрограммного управ- ления производится по включению или восстановлению после провала сети электропитания от блока начальной установки (не показан).
Динамика (темп) работы блока микропрограммного управления определяется генератором 21 тактовых импульсов ГТИ. Как видно из временной диаграммы (фиг. 8), при наличии соответству- ющих сигналов на входе мультиплексоров 17 и 18, например сигнала ЗАН от ОШ, на выходе мультиплексора снимает- ся единичный сигнал, который фиксируется на адресном триггере.15, которьй обеспечивает выборку микропрограммного слова с адресом передачи управления на подпрограмму реализации соответствующей функции
Примем адрес микропрограммного слова, осуществляющего опрос мультиплексора 17 по первому каналу. А,. : ; OOg (табл. 2).
В этом микропрограммном слове фиксируется адрес следующего микрокомандного слова Х1 02g, однако этот адрес будет дополнен младшим разрядом, равным единице, так как от опроса сигнала ЗАН и при его наличии триггер 15 устанавливается в состояние единицы, тогда адрес следующей ячейки ПЗУ имеет вид: А 02 1 03.
Полученный таким образом адрес интерпретирует в дальнейшем как адрес передачи управления, а ячейка с этим адресом называется ячейкой, которой передается управление о
Дальнейшая реализация подпрограммы обработки сигнала ЗАН представлена .в табл. 3.
При считывании микропрограммного слова с третьей ячейки ПЗУ производит ся передача управления в десятую ячейку ПЗУ. При считывании содержимого десятой ячейки ПЗУ производится опрос мультиплексора 17 по третьему ка- налу (ХА 03), на которьм подключен, сигнал СХЗ, обозначающий, что на магистралях адреса и данных находится информация от общей шиныо
В случае, если сигнал СХЗ равен единице, то с выхода мультиплексора Т7 устанавливается в единичное состо-т яние триггер 13, и управление передается в тринадцатую ячейку (XI 12 н 5 1), в противном случае - в двенадцатую (XI 12). Из двенадцатой ячейки управление вновь передается в десятую ячейку (XI 10)о Таким образом осуществляется динамическое ожидание сигнала СХЗ.
При считьшании микропрограммного слова с ячейки ПЗУ с адресом 13 производится опрос шинного формирователя 5 (У1 0) и опрос мультиплексора 1 по второму каналу Х6 02. Это означает, что код адреса с общей шины через шинньй формирователь 5, мультиплексор 1 поступает на вход селекто-. - ра 14 адреса, на информационный вход блока 29 памяти оперативного адреса и информационный вход группы элементов И-ИЛИ 30.
Рассмотрим далее процесс дешифрации адреса в предлагаемом устройстве.
Функциональная схема селектора 14 адреса (фиг. 10) -поясняет порядок формирования адреса реализуемой подпрограммы в устройстве.
В состав селектора 14 адреса входят ПЗУ 1 - постоянное запоминающее устройство табличного типа, предназначенное для дешифрации адреса обращения с каждой из сопрягаемых магист-- ралей, соответствующего операции загрузки СОА 29; ПЗУ 3 постоянное; запоминающее устройство табличного типа, предназначенное для формирования ад1зеса функциональной подпрограммы в зависимости от входных кодов А1 и А2, поступающих соответственно с выходов ПЗУ 1 или селектора оперативного адреса и с выхода ПЗУ 25; элемент И 2, предназначенный для формирования управляющего сигнала, поступающего на вход управления ПЗУ 3 при наличии нулевого потен1щала на всех восьми разрядах выходных каналов мультиплексора 1; резисторная сборка 4, предназначенная для обеспечения нулевого потенциала на выходных шинах с ПЗУ 3 при отсутствии управляющего сигнала с выхода элемента И 2„
По начальной установке триггер 28 состояния находится в нулевом состоянии, что обеспечивает режим загрузки блока 29 памяти оперативно.го адреса и рабочий режим ПЗУ 1 селектора 14 сщреса, устанавливается подготови- тельньй режим устройства. Адрес обращения с внешней магистрали, соответствующий операции загрузки блока памяти оперативного адреса, поступающий на адресный вход ПЗУ 1 селектора 14 адреса (младшие 10 разрядов), дешифрируется в условный код, которьш поступает на адресньп вход ПЗУ 3 селектора 14 адресео При нулевых потенциалах на восьми старших разрядах адресных шин и наличии сигнала с выхода элемента И 2 селектора 14 адреса на выходе ПЗУ 3 формируется адрес функ- цион.альной подпрограммы вьшолнения операции загрузки ячейки селектора оперативного адреса, коммутируется на вход регистра 22 адреса подпрограмм, где фиксируется синхроимпульсом инверсной серии ГТИ через элемент И 23, управляемым микрокомандой У11 1 (фиг. 1),
l-iHKponporpaMMa, вызываемая при этом из ПЗУ 25, обеспечивает прием информации в ячейку блока 29 памяти
0
5
0
5
оперативного адреса с выхода мульти- плексора 1, открывающего по каналу шинного формирователя 6 или 7, в зависимости от внешней магистрали (ОШ или МПИ) инициирующей обмен.
При этом группа элементов И-ИЛИ 30, управляемая выходными сигналами с триггера 28 состояния, коммутирует на адресные входы блока 29 памяти оперативного адреса выход регистра 2 адреса. Таким образом, адрес загружаемой ячейки блока 29 памяти оперативного адреса определяется содержимым регистра 2 адреса. По завершении операции загрузки вырабатывается микрокоманда Y6, производящая инкременти- рование содержания регистра 2 адреса и, тем самым, подготавливается операция загрузки следующей ячейки блока 29 памяти оперативного адреса,
При принятли устройством адреса обращения с внешней магистрали, отлич- . ного от принятого для операции за-груз- ки ячейки блока 29 памяти оперативного адреса, га выходе ПЗУ 3 селектора 14 адреса форм ируется нулевой код.
После заполнения описанным способом всех 1-К ячеек блока 29 памяти оперативного адреса (при наличии сигнала с выхода элемента И 10) вьфаба- тываётся микрокоманда Y29, устанавливающая триггер 28 состояния в единичное состояние. Тем самым определяется режим считывания информации с блока 29 памяти оперативного адреса и производится перекоммутация адресных входов блока 29 памяти оперативного адреса через группу элементов И-ИЛ- 30 на выход мультиплексора 1. ПЗУ1 селектора 14 адреса выключается из рабо- , ты, на его выходных шинах устанавливаются уровни третьего состояния. Устройство переходит в рабочий режим.
В дальнейшей работе устройства дешифрация адреса обращения с внешних магистралей, скоммутированного через мультиплексор 1 и группу элементов И-ИЛИ 30, осуществляется на блоке 29 памяти оперативного адреса. В результате с выхода блока 29 памяти оперативного адргса на адресные входы А1 ПЗУ 3 селектора 14 адреса поступает условньш адрес, сформированный в строгой зависимости от принимаемого адре- 5 са, с внешней магистрали и от кодовой информации, загруженной предварительно в блок 29 памяти оперативного адреса в указанном порядке. В зависимо-
0
5
0
5
0
сти от .входных кодов А1 и А2 и управляющего сигнала с выхода элемента И 2 селектора 14 адреса на выходе ПЗУ 3 селектора 14 адреса формируется адрес функциональной подпрограммы, фикси- руемьй синхроимпульсом инверсной серии ГТИ через элемент И 23, управляе- мьй микрокомандой Y11 1 (фиг, 1) и., таким образом, инициируется микропро- грамма выполняемой устройством операции, соответствующей селектируемому. адресу обращения с одной из сопряТ- а- емых магистралей.
Перезагрузка произвольного числа ячеек блока 29 памяти оперативного адреса может производиться в процессе работы устройства. При этом адрес перезагружаемой ячейки блока 29 памяти I оперативного адреса полностью опреде I ляется содержанием регистра 2 ад1реса I Адрес обращения с внешней магистрали I должен соответствовать вьшолняемой I операции и находиться в зависимости I от кодовой информации, загруженной в ;блок памяти оперативного адреса В вызьюаемой микропрограмме непосредственно перед вьшолнением операции за- грузки ячейки блока 29 памяти оперативного адреса вырабатьшается микрот кбманда УЗО, устанавливающая триггер состояния 28 в нулевое состояние, а по окончании операции вырабатьшается микрокоманда Y29, возвращая триггер .- :28 состояния в единичное состояние, :и микрокоманда Y6, инкрементирующая содержимое регистра 2 адреса.
Так, предусматривается оператиз- Ное переназначение адресов обращения со стороны сопрягаемых магистралей, ; соответствующих выполнению операций, определяемых библиотекой функциональных микропрограмм, прошитых в ПЗУ 25, примерный список которых приводится ; в табл. 1;, причем адрес, соответствующий выполняемой операции, может изменяться в процессе работы путем перезагрузки ячеек блока 29 памяти опера тивного адреса.
Таким образом, одному адресу обращения может ставиться, в соответствие любая выполняемая устройством операция. Например, при адресе программ Xj, Xj полный адрес равен X X; тогда с ячейки (табл. 3),
20
25
30
35
40
45
50
телв 6 и пятьй канал,мультиплексора 1 коммутируется на входы регистра 2 адреса, где фиксируется микрокомандой Y7 1.
В том.случае, если дешифрируемьй адрес окна соответствует функции записи информации в регистр 3 данных, селектор 14 адреса выделяет код Хь которьш фиксируется в регистр 22 адреса пoдпpoгpa 4м. На следующем шаге ми .кр о командой Х6 информация коммутируется на вход регистра 3 данных, 1 де фиксируется микрокомандой Y8 1.
Аналогично фиксируется микрокоман- дои Y9 1 код вектора прерывания на регистре 8 э если адрес окна соответствует подпрограмме записи вектора прерывания.
Запись информации в ОЗУ 9 является более сложной функцией и настраивает - ся, как и остальные, кз адресов окка общей шины или МОИ,
Рассмотрим реализацию устройства операции загрузки ячейки ОЗУ 9 со стороны ОШ, Пусть адрес, инициирующий операцию записи со стороны ОШ А 776 100. Тогда пусть этот адрес в описанном порядке и в зависимости ОТ-кодовой информации, загруженной в блок 29 памяти оперативного адреса, преобразуетс.я на его выходе в код . 000100. При этом на адресных входах ПЗУ 3 селектора 14 адреса коды принимают значения А1 000100, А2 00000.
ПЗУ 3 селектора 14 адреса находится в рабочем состоянии (восемь старших разрядов адресного кода имеют co-i стояние низкого потенциала) и формирует на выходе условный адрес соответ ствующей функциональной микронрограммы 000100, которьй фиксируется ,на ре- гистре 22 адреса подпрограмм, а ми1«- ррпрограмма, которую он инициируете, ; обеспечивает запись (Y10 1) информации с выхода мультки гексора 1 через- регистр 3 данных ОЗУ 9 по адресу, за- даваемому регистром 2 адреса (эагру- жается предва:рительно) „ После оконча- ния записи очередного слова в ОЗУ вы-. рабатывается микрокоманда Y6 1, и к теку7дему адресу добавляется единица. после чего вырабатьгоается квитирзпощий Операция заканчиза-
,, , сигнал СХИ на ОШ
адрес которой X , будет снита- ется«
но- микропрограммное слово, в котором, Запись информации от МГШ произвогруппой разрядов Х6 05 информация (дктся при вьшолнении на магистрали
с шины данных через шинньй формирова- оманды Запись, а сигналом Обмен
0
5
0
5
0
5
0
телв 6 и пятьй канал,мультиплексора 1 коммутируется на входы регистра 2 адреса, где фиксируется микрокомандой Y7 1.
В том.случае, если дешифрируемьй адрес окна соответствует функции записи информации в регистр 3 данных, селектор 14 адреса выделяет код Хь которьш фиксируется в регистр 22 адреса пoдпpoгpa 4м. На следующем шаге ми .кр о командой Х6 информация коммутируется на вход регистра 3 данных, 1 де фиксируется микрокомандой Y8 1.
Аналогично фиксируется микрокоман- дои Y9 1 код вектора прерывания на регистре 8 э если адрес окна соответствует подпрограмме записи вектора прерывания.
Запись информации в ОЗУ 9 является более сложной функцией и настраивает - ся, как и остальные, кз адресов общей шины или МОИ,
Рассмотрим реализацию устройства операции загрузки ячейки ОЗУ 9 со стороны ОШ, Пусть адрес, инициирующий операцию записи со стороны ОШ А 776 100. Тогда пусть этот адрес в описанном порядке и в зависимости ОТ-кодовой информации, загруженной в блок 29 памяти оперативного адреса, преобразуетс.я на его выходе в код . 000100. При этом на адресных входах ПЗУ 3 селектора 14 адреса коды принимают значения А1 000100, А2 00000.
ПЗУ 3 селектора 14 адреса находится в рабочем состоянии (восемь старших разрядов адресного кода имеют co-i стояние низкого потенциала) и формирует на выходе условный адрес соответствующей функциональной микронрограмi мы 000100, которьй фиксируется ,на ре- гистре 22 адреса подпрограмм, а ми1«- ррпрограмма, которую он инициируете, ; обеспечивает запись (Y10 1) информации с выхода мультки гексора 1 через- регистр 3 данных ОЗУ 9 по адресу, за- даваемому регистром 2 адреса (эагру- жается предва:рительно) „ После оконча- ния записи очередного слова в ОЗУ вы-. рабатывается микрокоманда Y6 1, и к теку7дему адресу добавляется единица. после чего вырабатьгоается квитирзпощий Операция заканчиза-
сигнал СХИ на ОШ
ется«
316
(ОБМ) (фиг, 9).производится запись адреса на регистр 11 адреса МПИ. При опросе мультиплексора 18 и наличии на его входе сигнала Обмен триггер 15 устанавливается в единичное состояние и производится настройка блока микропрограммного управления на подпрограмму опроса мультиплексора 1, Через седьмой канал этого мультиплек сора адрес МПИ поступает на блок 29 памяти оперативного адреса, и далее условньм код поступает на селектор 14 адреса,
. В случае, если этот адрес является одним из тех адресов, на который запрограммирован блок 29 памяти оперативного адреса, адрес соответству ющей микропрограммы фиксируется на регистре 22 адреса подпрограмм. При выполнении этой подпрограммы (напри- мер, подпрограммы записи данных) вы-« рабатьшается микрокоманда Y3 О, и данные после опроса сигнала ДЗП поступают на шестой вход мультиплексора 1. Этот мультиплексор кодом Х6 07 коммутирует эти данные на вход регистра 3 данных, где они.фиксируются микроко мандой У8 1, формируемой соответствующим входом блока 12 чик°- ропрограммного управления (фиг, 9), Аналогичным образом производится запись информации на регистр 2 адрес или регистр 8 вектора прерьшания.
Запись информации в ОЗУ 9 производится по адресу, зафиксированному в регистре 2 адреса с помощью отдельной команды Запись, выполняемой с МПИ. Информация на вход ОЗУ 9 подается идентично подаче ее на регистр адреса и данных. При этом вырабатьшает- ся г-шкрокоманда Y10 1 и. информация фиксируется в ячейку ОЗУ с адресом, определяемым содержимым регистра 2 адреса После окончания операции со- ; держимое регистра адреса увеличивает ся на единицу. Обмен данными по ини- ; циативе устройства для сопряжения выполняется при реализации прямого до-, , ступа к памяти и в режиме прерывания программ, вьшолняемых на обеих магистралях.
Б режиме прямого доступа (табл. 1) вьшолняются операции передачи накоп- ленной в ОЗУ 9 информации. При этом устройство для сопряжения дешифрует в описанном порядке фиксированный ; адресJ поступающий из ,общей шины, и настраивается от селектора 14 адре- ;
14
5
. Q
о
20
5
5
0
5
0
5
са на соответствующую подпрограмму, реализующую операцию ПРД.
В процессе реализации этой подпрограммы на выходе регистра 16 микрокоманд формируется микрокоманда Y26, имитирующая сигнал ЗМ, которая транслируется через соответствующий передатчик 19,так как блок микропрограммного управления работает в режиме динамического ожидания сигнала. - Формирование сигнала ЗМ (Y26) и анализа сигнала РЗМ, поступающего на вход мультиплексора 18, производится одной подпрограммой.
Йри появлении сигнала РЗМ, что является условием для передачи управления на следующую подпрограмму, вырабатывается микрокоманда Y27, имитирующая сигнал ИЗ, и вновь, при сохранении сигнала ПЗ, анализируется сигнал i РЗМ. После его снятия с входа мультиплексора 18 управление передается подпрограмме, в которой произ водится подготовка передаваемого сообщения (слева) на регистре данных. В случае передачи данных из ОЗУ 9. с этой целью при микрокоманде Y10 О (считывание с ОЗУ 9) по адресу, поступающему на адресньй вход ОЗУ, считывается соответствующее слово, ко--, торое через третий канал мультиплексора 1, управляемого кодом Х6 03, подается на вход регистра 3 данных, где фиксируется на следующем шаге микрокомандой Y8 1. В этом же микропрограммном слове формируются микрокоманды Y4 1 и Y3 1, коммутирующие группу элементов И-ИЛИ 4 и шин- ньй формирователь 7 на вьщачу содержимого регистра 2 адреса на МПИ.
С задержкой на один шаг, т.е. в следующем микрокомандном слове,при сохранении микрокоманд Y4 1 и Y3 1 формируется микрокоманда, имити- р тощая сигнал СБМ. Управление передается следующему микропрограммному слову, в котором сохраняется значение микрокоманды сигнала ОБМ и вырабатьг- ваются микрокоманды Y5 1 и Y3 1 (Y4 обнуляется), т.е. на магистраль 2Ш передается содержимое регистра 3 данных, в котором ранее подготовлено содержимое соответствующей ячейки па- мятИо Также формируется микрокоманда, имитирующая сигнал ДЗП на МПИ. Одновременно вырабатывается микрокоманда Y14 1, уменьшающая содержимое реги-f- стра 2 адреса на единицу.
15
1615730
16
fO
20
Анализируя четвертый канал мультиплексора 18 и при появлении на его входе сигнала ОТВ управление переда - ется следующему микропрограммному слову, в котором снимается микроко- манда ДЗП и далее анализируется сняI тие сигнала ОТБ с МПИ. При этом микI рркоманда сигнала ПЗ удерживается все это время в рабочем состоянии (Y27
1)0
Управление передается подпрограмме, вьтолняющей функции вьщачи адресной и числовой информации с созфане- нием сигнала ПЗ и анализом по описанному усеченному алгоритму (без формирования микрокоманд сигнала ЗМ и ана|лиза сигнала ЗМ и анализа сигнала
|РЗМ)с Причем производится анализ еди-ничного сигнала от элемента И 10, по ступающего по первому каналу мульти|Ш1ексора 18, В случае, когда этот
|сигнал принимает единичное значение
|управленйе передается на подпрограмНу вьщачи вектора прерьшания на общую 25
ну в знак того, что передача данных
р режиме прямого доступа окончена.
I Рассмотрим далее, как протекает
|эбмен данными с ОЫ по инициативе уст|)ойства для сопряжения в режима Щ)ерыванкя программе При этом после приЫа данных с МПИ, что описано, напри|iep, по алгоритму операции ЗГД2
.табл. 1), устройство для сопряжения
ереходит на подпрограмму вьщачи на
1Ш фиксированного вектора прерьгоания
Х5, сообщенного ЭВМ о необходимости тения данных из определенного реги- 4тра. На первом шаге этой подпрограм- формируется микрокоманда (Yt7 1) 1 митирующая сигнал ЗП, которая через 4оответствующий передатчик 20 транс- л руется на ОШ. Далее .алгоритм функ- ю1ионирования устройства для сопряже- обеспечивает динамическое ожидание сигнала РП, т.е. производится опрос м)ультиплексора 17 по соответствующему врсоду. При появлении сигнала РП вьфа- б|атывается условие на триггере 15 ДГгя перехода на выполнение микрокоманды, имитирующей, установку сигнала ДВБ (Y18 1) и сбрасьшающей сигнал ЗЙ на ОШ.
Далее по опросу сброса сигнала РП ((Ьпрос мультиплексора 17), а также при
отсутствии сигнала ЗАН на ОШ устанав- 55r - v,«« «оу
лйвается сигнал: ЗАН (Y16 1), кбто- ™стралей по авт. св. № 1348874, Р1ЙЙ через передатчик 20 транслируется на ОШ. Следующие микрокоманды форми- Т РЗПот Х5 - вектор прерьюания программ
и Хб - управляющий код мультип 1 (открывающий его по четверто ду) , На следующем шаге осущест Фиксация вектора прерывания на ре 2 адреса микрокомандой Y7 этом же микрокомандном слове ф ется микрокоманда Y4 1; Y2 мутирующая шинньй формировател вьщачу содержимого регистра 2 на ОШ, При отсутствии на ОШ си СХИ (устанавливается по опросу типлексора 17) формируется мик да (Y19 1), имитирующая сигн ПРБР, Следующая микрокоманда ( 0) снимает сигнал ПВБ и перех динамическое ожидание сигнала С ОШ по опросу мультиплексора 17 равляющим кодом Х4). В момент сигнала СХИ с ОШ адресньй триг устанавливается в единичное со и определяет условный переход полнению микрокоманды Y19 О, О, снимающей сигналы ПРЕР, ЗА После вьтолнения описанного ритма блок 12 микропрограммного вления устройства для сопряжени реходит в режим поиска и обрабо сигналов запроса на доступ к ус ству для сопряжения от ОШ. Посл нятия адреса с ОШ, например А11 селекции его на селекторе 14 ад блок 12 микропрограммного управ переходит на выполнение програм чтения регистра данных на ОШ (п водится операция ЧДП согласно т причем на ОШ через передатчики ставляются сигналы и анализирую сигналы на общей шине по опросу типлексора 17 в соответствии с НОИ диаграммой обмена интерфейс По окончании операции чтения дан на МПИ может вьщаваться вектор п вания, означающий окончание цикЛ передачи данных МПИ - ОШ
Таким образом, в предложенном ройстве сопряжения двух магистра реализована возможность исполнен различных вариантов операций пер
50 npf абонентов, имеющих 50 адрес в адресном пространстве ад емых абонентов.
Формула изобретен Устройство для сопряжения дву
30
35
40
45
отличающееся тем, чт целью расширения области применен за счет переменной идентификации
16
fO
20
25
,«« «оу
™стралей по авт. св. № 1348874,
и Хб - управляющий код мультиплексора 1 (открывающий его по четвертому входу) , На следующем шаге осуществляется Фиксация вектора прерывания на регист ре 2 адреса микрокомандой Y7 1. в этом же микрокомандном слове формируется микрокоманда Y4 1; Y2 1, коммутирующая шинньй формирователь 6 на вьщачу содержимого регистра 2 адреса на ОШ, При отсутствии на ОШ сигнала СХИ (устанавливается по опросу мультиплексора 17) формируется микрокоманд да (Y19 1), имитирующая сигнал ПРБР, Следующая микрокоманда (Y18 0) снимает сигнал ПВБ и переходит в динамическое ожидание сигнала СХИ с ОШ по опросу мультиплексора 17 (Управляющим кодом Х4). В момент приема сигнала СХИ с ОШ адресньй триггер 15 устанавливается в единичное состояние и определяет условный переход к выполнению микрокоманды Y19 О, Y16 О, снимающей сигналы ПРЕР, ЗАН. После вьтолнения описанного алгоритма блок 12 микропрограммного упра вления устройства для сопряжения переходит в режим поиска и обработки сигналов запроса на доступ к устройству для сопряжения от ОШ. После принятия адреса с ОШ, например А11, и селекции его на селекторе 14 адреса, блок 12 микропрограммного управления переходит на выполнение программы чтения регистра данных на ОШ (производится операция ЧДП согласно табл. 1) причем на ОШ через передатчики 20 вы- ставляются сигналы и анализируются сигналы на общей шине по опросу мультиплексора 17 в соответствии с времен- НОИ диаграммой обмена интерфейса ОШ. По окончании операции чтения данных на МПИ может вьщаваться вектор прерывания, означающий окончание цикЛа передачи данных МПИ - ОШ
Таким образом, в предложенном устройстве сопряжения двух магистралей : реализована возможность исполнения . различных вариантов операций переда0 npf абонентов, имеющих один 0 адрес в адресном пространстве адресуемых абонентов.
Формула изобретения - Устройство для сопряжения двух ма 30
35
40
5
™стралей по авт. св. № 1348874,
отличающееся тем, что, с) целью расширения области применения за счет переменной идентификации ад17
ресов, используемых в качестве кодов операций, определяющих алгор.итм передачи информации между сопрягаемыми -. ЦВМ, в него введены триггер состояния, блок памяти оперативного адреса и вторая группа элементов И-ИЛИ, первые входы которых соединены с выходами регистра адреса, выходы первого мультиплексора соединены с вторыми входами элементов И-ИЛИ второй группы и с 1нформационными входами блока памяти оперативного адреса, вход вы- .борки, адресные входы и выходы которого соединены соответственно с двадцать восьмым выходом регистра микрокоманд, выходами элементов И-ИЛИ груп
573018
пы и третьим информационным входом селектора адреса, информационный вх&Д, вход установки в 1, синхровход и г вход установки в О триггера состояния соединены соответственно с шиной логического О устройства, двадцать девятым и тридцатым выходами регистра микрокоманд и входом начальной усJQ тановки устройства, прямой вход триггера состояния соединен с входом уп равления записью-чтением блока памяти оперативного адреса и третьими входами .элементов И-ИЛИ группы, четвертые вхо15 дьк,которых соединены с инверсным выходом триггера состояния и управляющим входом селектора адреса, I
Таблица 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения двух магистралей | 1988 |
|
SU1509915A2 |
| Устройство для сопряжения двух магистралей | 1986 |
|
SU1348874A1 |
| Многоканальное устройство для сопряжения ЭВМ | 1988 |
|
SU1695311A1 |
| Микропрограммное устройство сопряжения | 1989 |
|
SU1700560A1 |
| Микропрограммное устройство управления | 1987 |
|
SU1490676A1 |
| Устройство для сопряжения ЭВМ с абонентом | 1987 |
|
SU1476477A1 |
| Многоканальное устройство для сопряжения двух ЭВМ | 1985 |
|
SU1312585A1 |
| Устройство для отладки программ | 1988 |
|
SU1661771A1 |
| Устройство для сопряжения магистрали ЭВМ с магистралью внешних устройств | 1984 |
|
SU1246105A1 |
| Устройство для сопряжения ЦВМ с внешним устройством | 1989 |
|
SU1661779A1 |
Устройство к вычислительной технике и может быть использовано для сопряжения мини- и микро ЭВМ. Цель изобретения - расширение области применения за счет переменной идентификации адресов, используемых в качестве кодов операций, определяющих алгоритм передачи информации между сопрягаемыми ЦВМ. Устройство содержит генератор тактовых импульсов, три мультиплексора, три шинных формирователя, оперативное запоминающее устройство, постоянное запоминающее устройство, регистр вектора прерываний, регистр адреса, регистр данных, две группы элементов И-ИЛИ, регистр адреса МПИ, два элемента И, блок памяти оперативного адреса, элемент ИЛИ, адресный триггер, триггер состояния, регистр адреса микрокоманды, регистр микрокоманды, два передатчика. 10 ил., 3 табл.
Загрузка регистра адреса ОШ
ЗГА1
А1
|3агрузка регист- jpa данных от ОЫ
ЗГД1
А2
ЗГВ1
A3
Загрузка ОЗУ из
ЗП11
А4
ЧГА1
А5
Считывание реЧТД1
Аб
Производится загрузка регистра адреса данными, поступающими по магистрали данных с ОШ, По адресной магистрали ОШ поступает в адрес А1 операции
Производится загрузка регистра данных данными, поступающими по магистрали данных с ОШ. По адресной магистрали ОШ поступает через А2 операции
Производится загрутка регистра вектора прерываний данными, поступающими по магистрали данных с ОШо По адресной магистрали ОШ поступает адрес- A3 операции
Производится загрузка ячейки ОЗУ данными, поступающими по магистрали даиньос с ОШ, По адресной магистрали ОШ подается адрес операции А4, Адрес ячейки ОЗУ определяется десятью разрядами регистра адреса. По окончании операции содержимое регистра адреса увеличивается на единицу
Производится считывание соДер- жимого с регистра адреса на ОШ по команде СМ4, при этом по адресной магистрали ОШ поступает адрес А5, .
Производится считывание содергистра данных на ОШ
ЧТВ1
А7
Считывание ОЗУ| на ОЫ
ЧОП1
А8
ГДВ1
А9
УАП
AID
ЧДП
А11
ЧВП
А12
Считывание ОЗУ на ОЫ
ЧОП2
А13
Продолжение табл. 1
жимого регистра данных на ОШ команде СМ4, при этом по адресной магистрали ОШ поступает адрес А6
Производится считывание содержимого регистра вектора прерывания на ОШ по команде СМ4, при этом на адресной магистрали ОШ задается адрес А7
Производится считывание ячейки ОЗУ с адресом, указанным содержимым регистра адреса. По адресной магистрали ОШ задается адрес операции А8. По окончании операции содержимое регистра адреса уменьшается на единицу
По адресной магистрали ОШ задается адрес А9 операции. Производится передача вектора прерывания В1 на МЦИ, а затем считывание содержимого регистра данных командой ЧТД2 от МПИ. По окончании операции ЧГД2 на ОШ выдается вектор прерывания В2
Производится считывание содержимо го регистра адреса на ОШ по команде СМ4, при этом по адресной магистрали ОШ поступает адрес А10. По оконугании операции на КПИ вьщаетс вектор прерывания ВЗ.
Производится считывание содержимого регистра данных на ОШ по команде СМ4, при этом по адресной магистрали ОШ на устройство для сопряжения поступает адрес А11 . По окончании операции на МПИ вьщаетс вектор прерывания В4
Производится считывание содержимого регистра вектора прерывания на ОШ по команде СМ4, при этом по адресной магистрали ОШ задается адрес А12. По окончании операции на МПИ вьщается вектор прерывания В5
По адресной магистрали ОШ задает- ется адрес операции А13. Производится считывание ячейки оперативного ЗУ с адресом, указанным содежимым регистра адреса. По окончании операции содержимое регистра
Передача содержимого регистра данных на МПИ ;:по произвольному вектору лрерьгоания
Передача содержимого регистра данных на МПИ по прямому доступу
Передача содержимого ОЗУ на МПИ по прямому доступу
Мгрузка регистра данных от МПИ
Загрузка регистра адреса т МПИ
Загрузка регистра вектора прерывания
Загрузка ОЗУ от МПИ
ЗП12
Продолжение табл. 1
А14
А15
А16
17
18
19
20
. :
адреса уменьшается на единицу. На магистраль МПИ выдается вектор прерывания программы В6
По адресной магистрали ОШ задается адрес А14 операции. Производится ; передача содержимого регистра вектора прерывания программы на МПИ. Вьшолняется команда ДЧТ от МПИ. По ,, окончании команды ДЧТ на ОШ выдает- ся вектор прерывания Б7
По адресной магистрали ОШ задается адрес А15 операции. Производится передача содержимо го регистра адреса и регистра данных в режиме прямого доступа к МПИ. По окончании операции на ОШ выдается вектор прерывания В9
По адресной магистрали ОШ задается адрес А16. Производится передача массива данных в режиме прямого доступа. При этом адрес каждого сообщения определяется содержимым регистра адреса и отличается от предыдущего на минус единицу. Младшие десять разрядов регистра адреса определяют ячейку ОЗУ., Окончание операции определяется нулевым содержимым десяти младших разрядов регистра адреса. По окончании операции на ОШ вьщается вектор прерывания В10
Производится загрузка регистра данных данными, поступающими от МПИ. В адресной части команды ДЗП зада-, ется адрес А17 операции
Производится загрузка регистра адреса данными, поступающими от МПИ. В адресной части команды ДЗП задается адрес А18 операции
Производится загрузка регистра вектора прерывания данными, поступающими от МПИ. В адресной части команды ДЗП задается адрес А19 операции
Производится загрузка ячейки one- ративного ЗК адаптера магистралей данными, поступающими от магистрали МПИ. В адресной части команды ДЗП задается адрес А29. Адрес ячейки ОЗУ при этом определяется де-
23
iei57.30
Ьчйтывание ре ЧТА2
: истра адреса на МПИ
А21
( читывание ре-ЧТД2
истра данных iko МПИ
А22
рчитьшание ре-ЧТВ2
(истра вектора врьшания на МПИ
А23
I
. (чизгывание ОЗУЧОП2
А24
ПРВ
А25
ЧАО
А26.
JПередача век- ора прерьюа- Е)ания с МПИ н|а ОШ в режи- Ие прерьшания
24 Продолжение табл.1
сятью младшими разрядами регистра адреса
Производится считывание содержимого регистра адреса на МПИ с помощью команды ДЧТ. При этом в адресной части команды задается адрес А21
Производится считывание содержимого регистра данных на МПИ с помощью команды ДЧТ, при этом в адресной части команды задается адрес А23
Производится считывание содержимого регистра вектора прерьшания на . МПИ с помощью команды ДЧТ, при этом в адресной части команды задается адрес А23
Производится считывание содержимого ячейки ОЗУ, адрес которой указан десятью младшими разрядами ре-: гистра адреса, на fflИ с помощью команды на ДЧТ, при этом в адрес- ной части команды задается адрес А24, Содержимое регистра адреса после окончания операции меняется ; на минус единицу
Производится загрузка регистра вектора прерываний программ данными, поступающими на МПИ. В адресной части команды ДЗП задается адрес А25 операции. В режиме пре- рыва)йия на ОШ передается содержимое регистра вектора прерывания в ; качестве вектора прерывания
По адресной магистрали ОШ задает- ся адрес операции А26. Регистр адреса загружается данными, посту- ; пающими по магистрали данных, Средствами устройства для сопряжения формируется команда ДЧТ, в адресной части которой передается содержимое регистра адреса.После приема информации на регистр данных; в ОШ вьщается вектор прерывания В11;
После обработки сигнала запроса на ; прерьшание ЗПР с шины МПИ на ре- гистр вектора прерывания принимается вектор прерывания, который
транслируется на ОШ в режиме пре рьг ; вания программ. После окончания операции на МПИ вьщается вектор прерывания В12
ПВП2
пео
ЗОП1
А25
ЗОП2
А26
Продолжение табл. 1,После обработки сигнала запроса на прерьшание ЗП с ОШ на регистр вектора прерывания принимается вектор прерьшания, который транслируется на МПИ в режиме прерывания програм После окончания операции на ОШ вы дается вектор прерьшания В13
В адресной части команды с МПИ задается адрес А29. Производится пе- р-едача массива данных, записанных в ОЗУ, на ОШ в режиме прямого доступа. При этом адрес каждого сообщения определяется содержимым регистра адреса и отличается от пре- дьщущего на минус единицу. Младшие десять разрядов регистра адреса определяют адрес ячейки ОЗУ. Окончание операции определяется целевым содержанием десяти кг адших разрядов регистра адреса. По окончании операции на ЮШ вьщается вектор прерывания 314
Производится загрузка ячейки СОА 29 со стороны ОШ. Адрес ячейки СОА 29 определяется содержимым регистра 2 адреса. По окончании операции содержимое .регистра 2 адреса инкре- ментируется. По переполнению регистра 2 адреса триггер 28 состояния
устанавливается в единичное состояние
Производится загрузка ячейки СОА 29 со стороны МПИ. Адрес ячейки СОА 29 определяется содержимым регистра 2 адреса. По окончании операции содержимое регистра 2 адреса инкре- ментируется. По переполнению регистра 2 адреса триггер 28 состояния устанавливается в единичное состояние
27
161573028
Таблица 2
О w XT l/ Ji/,v|
LliJ l±l3EiV
xv25 - x|p
IIJIЧ11111 I I 111...ДЯ1яJ
Фие,2
17 76 15 1
зли Лиг. 7v.a
8ип9 мпн
вен
Инход рпжтра H/ttf
JI3ff
Лкгос ндльтиплекара 18 --
Выпад гоиппы разрядояХЭ
9ыхяд Х6
и Y13 .
gtixod нутан/нтх- сора t
выпв регистра атесв пааеоанп
ОТО
Вмавткрв-- ,9vY7
etiuinuitpo-,
mHOtfu г Л
О
ФиеЛ
.XZX
Фм.9
и
Машинное cjJoBo
Адрес слаба (ячейки, ujju регистра)
ДополнительныеАдрес байта 6 слове
разряды расширение объемов адресов
Фиг.Ъ
Старший байт
Машинное слабо
Младший байт
Фиг.6
Фиг Ю подпрограмм 22
| Устройство для сопряжения двух магистралей | 1986 |
|
SU1348874A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
