3,1620990
Изобретение относится к измерителы ной технике и может быть использовано в качестве устройства, улучшающего динамическую характеристику инерционного ,. измерительного преобразователя физических величин.
Цель изобретения - повышение точ-t v ности измерения и расширение области применения.JQ
На чертеже изображена блок-схема корректора динамической характеристики инерционного измерительного преобразователя.
Корректор содержит измерительный (5 преобразователь I, который представляет собой инерционную систему, преобразующую измеряемую физическую величину в электрический сигнал. Выход измерительного преобразователя соединен 20 с входом аналого-цифрового преобразог вателя 2, преобразующего аналоговьй сигнал в двоичный код дискретного числа. Выход аналого-цифрового преобразователя 2 соединен с первым входом сум- 25 матора 3, выход которого соединен с входом формирователя 4 оценки вектора состояния, который на каждом такте вырабатывает п+2 выходных величин согласно соответствующим уравнениям. Все зд п+2 выхода формирователя 4 соединены с соответствующими входами формирователя 5 свертки, причем (п-Н)-ый и (п+2)-и выходы формирователя 4 одновременно являются выходами устройства.. Выход, формирователя 5 соединен- с вторым входом сумматора. Формирователь 5 реализует ряд арифметических действий. Блоки 2-5 содержат каждый выходные запоминающие регистры. Их 0 синхронизация осуществляется блоком 6 синхронизации} выходы которого соединены с тактовыми входами блоков 2-5, а вход подключен к выходу задающего частоту тактирования генератора 7 им- 45 пульсов„
Корректор работает следующим об- разом.
35
гд
jb
ан на ва эт
ан вкл ри чин
гд
мо
На вход корректора поступает электрический сигнал (t), который является выходным сигналом измерительного преобразователя 1. В общем случае измерительный преобразователь описывается дифференциаль ным уравнением порядка п, которое можно записать как систему n-го порядка линейных уравнений с дискретным временем:
e(t+l) (Ь,в|(О (t) +... -.MnCt) +
0e(t+l) - );(I)
0s(t+l)
0n(tH) 6n, (t),
(5 0 25 0 5
5
0
где t - дискретное время;
|L(t) - выходной аналоговый
электрический сигнал измерительного преобразователя;
(с) входной физический сигнал измерительного преобразователя;
jb{,
ffriu jbp постоянные коэффициенты,
Сигнал ф((t) поступает на вход аналого-цифрового преобразователя 2, на выходе которого с периодом квантования UT формируется двоичный код этого сигнала.
Система (1) дополняется описанием ансамбля входных сигналов, который включает в себя все возможные траектории измерения входной физической величины :
(t) + SiЈ,fr, + J(t+}); 6W4e(t+l) 0n+«(t) +0n + /(t), (2)
где S n-nCt) - последовательность независимых гауссовских величин с параметрами N (0,1);
S( - среднеквадратическое отклонение (СКО) шума возбуждения;
,(t) - моделирует производную входного сигнала бп t).
Рекуррентные уравнения (1) и (2) могут быть записаны в векторной форме:
0-t-H А+ Ь,й, (t), - (3)
где &t .(б (с),.. . ,QmQj t)) -век-тор;
55
а я
b,
1620990 6
Из векторного уравнения (7) определяется система линейных уравнений, описывающих алгоритм работы корректог
5 РЭ
m,(t+l) V(t) + r((t,t-H);
m.(t) + r(t,t+l);
тг(с+2)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров периодического сигнала | 1984 |
|
SU1223378A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Адаптивный взаимно базисный корректор | 1987 |
|
SU1497747A1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ПЕЛЕНГОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
SU1840092A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
| Аналого-цифровой преобразователь | 1985 |
|
SU1311022A1 |
| Устройство для ассоциативного сжатия информации | 1983 |
|
SU1120390A1 |
| Цифровой фильтр | 1988 |
|
SU1569958A1 |
| Цифровой корректор статической и динамической характеристик инерционного измерительного преобразователя | 1980 |
|
SU954930A1 |
Изобретение относится к измерительной технике и может быть использовано как устройство,, улучшапщсс динамическую характеристику инерционно- го измерительного преобразователя физических величин. Цель изобретения - повышение точности измерения и расширение области применения. Корректор содержит измерительный преобразователь 1, аналого-цифровой преобразователь 2, сумматор 3, формирователь 4 оценки вектора состояния,Формирователь 5 свертки, блок 6 синхронизации, генератор 7 импульсов. 1 ил.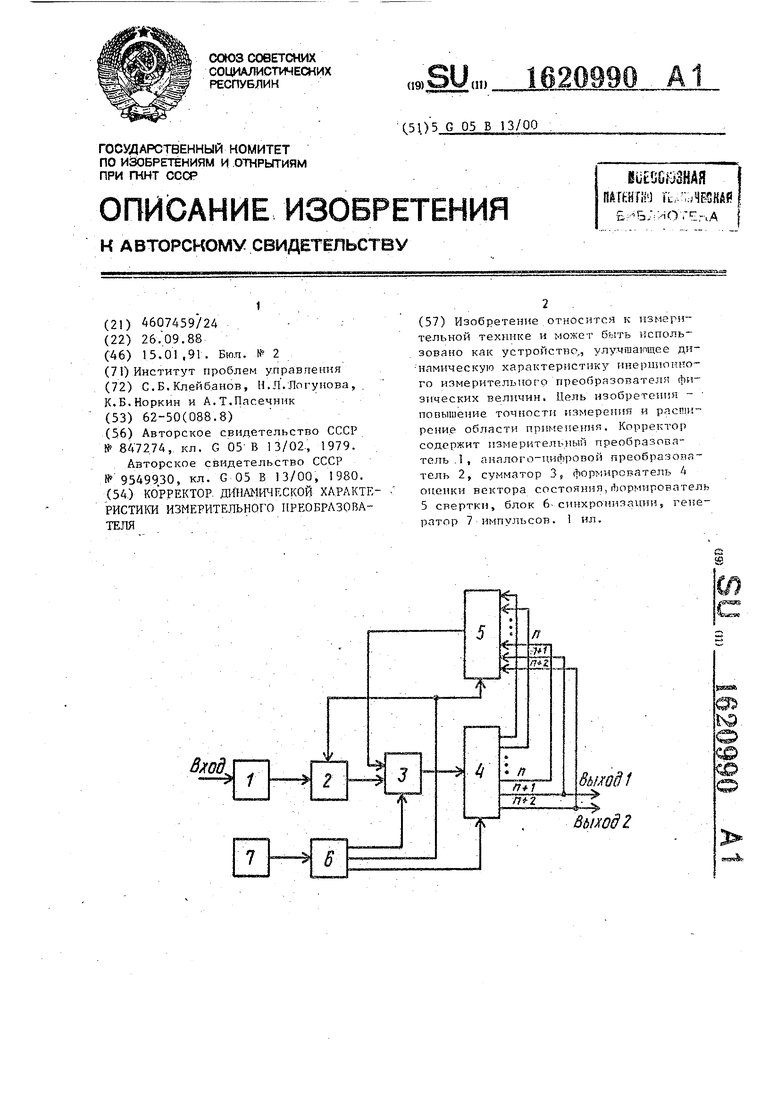
Ј,(t) /g4l(t)
(t)
4,(t)
Cj(t) гауссовекий случайный век- тор с независимыми компонентами, каждая из которых нормально распределена с N (0,1).
Уравнение (3) дополняется уравнени ем наблюдаемой величины
, + + Bfteu(t+l), (4) где А (5,,рв, ...,, 0,);
В/2 СКО шума наблюдений; 5(О - последовательность независимых случайных величин, нормально распределенных с N (0,1). Оптимальная в среднеквадратичном оценка вектора 6% , определяемая на основе (3) и (А), записывается в виде пары рекуррентных уравнений:
a (
ra-fc - - A,rat);
,,
(.ytA)
Al
S« +
b,bt
i+4
,(5)
S + Ъ1
(6)
nii(t))
где п (т(с) ,m(t) ,... ,m
Jf. - матрица ковариаций ошибки
оценивания.
Так как в рекурентное уравнение (6) не входят наблюдения, то стационарное решение его м может быть подсчитано заранее и подставлено в уравнение фильтрации (5), описывающее корректор:
mi+ + ), ()
где вектор R (г ,г4,... ,rn+(j) подсчитывается заранее по формуле
R (s|+ A). (8)
mn(t+1) m./t) +rn5(t,t+l);
mnv4(t+l) mn(t) +гр+Дс+1);
тл-и2 с1;) mruЈ(t)+ mt(c) + + .t+l),(9)
где
is
-20
25
30
35
40
45
50
V(t) Ajtn.fc fy mЈt) (t) + ... .. .+pr)mrl(t) + p0mn(t), 5(t,t+l) | (t+1) - V(t). (10)
Величины mM4() и (t+l), определяемые по двум последьгим уравнениям системы (9), являются соответственно оценками значений производной измеряемого физического сигнала и его величины.
С выхода аналого-цифрового преобразователя 2 цифровой сигнал поступает на один из входов сумматора 3, определяющего значение разности О . С выхода сумматора сигнал $ поступает на вход формирователя 4, который по урав- нениям (9) формирует п+2 значений координат вектора оценок. Выходы п+1 и п+2 формирователя 4 являются выходами устройства. Найденные п+2 значения оценок по соответству тцим линиям подаются на вход Формирователя 5, осуществляющего вычисление значения свертки V(t) согласно (10) и его инвертирование. Выходной дискретный сигнал формирователя 5 поступает на второй вход сумматора. Согласно уравнениям системы (9) сначала формирователь 5 вычисляет инвертированное значение свертки V(t) по некоторым начальным значениям координат вектора гп(0) , затем сумматор 3 находит значение о , далее формирогатель 4 вычисляет вектор m(t+l). Эту очередность работы блоков задает блок 6 синхронизации, поочередно формируя на своих соответствующих выходах управляющие импульсы запуска блоков 2 и 4-6. На вход блока синхронизации подаются прямоугольные импульсы требуемой частоты и скважности от генератора 7 импульсов .
Формула изобретения
Корректор динамической характеристики измерительного преобразователя, содержащий блок синхронизации аналого-цифровой преобразователь, подклю-v ченный информационным входом к выходу измерительного преобразователя, отличающийся тем, что, с целью повышения точности измерения и расширения области применения, в него введены сумматор, формирователь оценки вектора состояния, формирователь свертки, генератор импульсов, причем выход аналого-цифрового преобразователя соединен с первым входом сумматора, выход которого соединен с информационным входом формирователя оценки вектора состояния, п+2 выхода которого соединены с соответствующими информационными входами формирователя свертки, .а (п+1)-й и (п+2)-и выходы одновременно являются выходами устройства, выход формирователя свертки соединен с вторым
входом сумматора, выход генератора
импульсов соединен с входом блока синхронизации, первый выход которого соединен с тактовым входом сумматора, второй выход - с тактовыми входами
аналого-цифрового преобразователя и формирователя свертки, а третий выход - с тактовым входом формирователя оценки вектора состояния.
| Адаптивное корректирующее устройство | 1977 |
|
SU847274A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 9549930, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
