(54) ЦИФРОВОЙ КОРРЕКТОР СТАТИЧЕСКОЙ И ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИК ИНЕРЦИОННОГО ИЗМЕРИТЕЛЬНОГО
1
Изобретение относится к измерительной технике и может быть использовано для создания устройства, улучшающего статическую и динамическую характеристику инерционного измерительного преобразовате 1я.
Известно адаптивное корректирующее устройство, обеспечивающее коррекцию при стационарности или квааистационарности параметра измерительного преобра- щ зоватепя, содержащее блок дифферешшро вания i i
Однако коэффициент передачи измерительного преобразователя не постоянен и меняется,вследствие чего получается не- и высокдя точнсють определения значения измеряемого сигнала, так как используемая система является аналоговой основанной на применении операционных усилителей, имеющих определенную невысо- 20 кую точность.
Наиболее близким к предлагаемому является цифровой корректор, содержащий блок дифференцирования . ПРЕОБРАЗОВАТЕЛЯ
Недостатком известного устройства является относительно невысокая точность определения входного сигнала, связанная с ограниченной точностью аналоговых бло
I ков, собираемых на базе операционных усилителей. Кроме того, устреЛство может обеспечивать измерение входного сигнала измерхительного преобразователя по значениям выходного сигнала при постоянстве входного сигнала и заданной статической характеристике, тЬчнее, при I Постоянстве входного измеряемого сигнала и задании постоянного значения коэффициента передачи измерительного преобразователя. При изменении последних точность их определения будет очень ниэ; кой. Устройство ДОЛЖНО также формировать прсжзводные первого и второго порядка, однако последняя реализуется со значительной погрещностью.
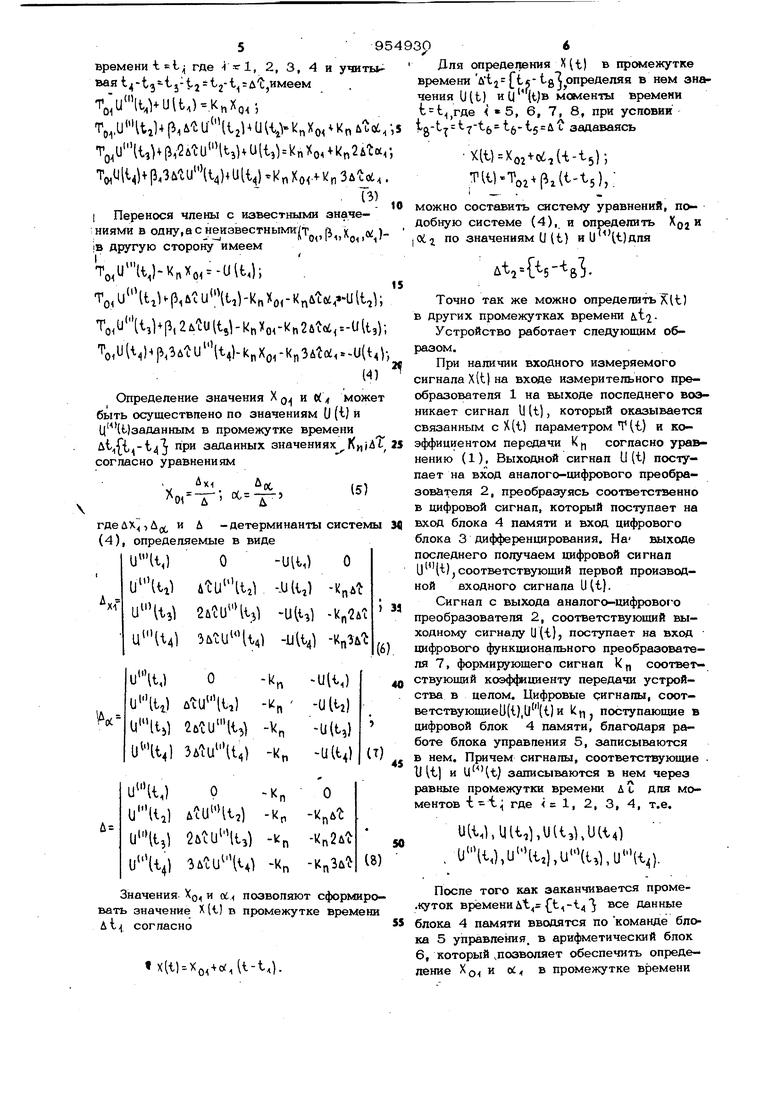
Цель изобретения г повыщение точности определения измеряемого сигнала и расщирение области применения. Указанная цепь достигается тем, что в корректор, содержащий блок дифференцирования, введены блок управления и последовательно соединенные аналого-циф ровой преобразователь, функциональный преобразователь, блок памяти и арифметический блок, причем вход блока управления соединен с выходом аналого-цифрового преобразователя, вторым входом блока памяти и через блок дифференцирования - с третьим входом блока памяти, четвертый вход которого соединен с выхо дом блока управления. На чертеже представлена стру|стурная электрическая схема корректора статической и динамической характеристики инерционного преобразователя. Устройство содержит измерительный преобразователь 1, аналого-цифровой преобразоватепь 2, цифровой блок 3 дифференцирования, блок 4 памяти, блок 5 управления, арифметический блок 6, функциональный преобразователь 7. Измерительный преобразователь 1 пред ставляет собой инерционную систему, пре.образующую измеряемую физическую величину в электрический сигнал. Выход измерительного преобразователя соединяется с входом аналого-цифрового преобразователя 2, преобразующим аналоговый сигнал в двоичный код дискретного числа. Выход аналого-цифрового преобразователя 2 соединен с входами цифрового блока 4 памяти непосредственно и через цифророй блок 3 дифференцирования. Цифровой блок 4 памяти предназначен для за поминания дискретных значений выходных сигналов аналого-цифрового преобразователя 2 и цифрового блока 3 дифференцирования, формирующего сигналы первой производной входного сигнала, а также выходных значений сигналов цифрового функционального пр)еобразоватепя. Выходы блока (4 памяти соединены с входами ариф метического блока 6, Кроме того, блок 4 памяти содержит управляемый вход, который соединен с выходом блока 5 управления, обеспечивающего срабатывание бло ка 4 памяти через равные промежутки времени. Цифровой блок 3 дифференцирования предназначен для формирования значений производных входного сигнала первого по рядка. Блок 5 , управления, подключенный к выходу аналого-цифрового преобразователя 2, вьшает сигнал на управляемый вход иифровбго блока 4 памяти, обес печивая запись поступающих сигналов на входе через равные промежутки времени. Арифметический блок 6 предназначен для решения алгебраической системы уравнений и обеспечивает определение неизвестных параметров, характеризующих входной измеряемый сигнал, и тем самым значений этого сигнала в отдельные промежутки времени. Входы арифметического блока 6 соединены с входами цифрового блока 4 памяти. Цифровой функциональный преобразователь 7 предназначен для определения статического коэффициента измерительного ;преобразоват9ля 1. Его выход соединен с входом цифрового блока 4 памяти, а выходы - с выходами .датчиков и аналогоцифрового 1реобразователЯ 2. Пусть инерционный измерительный преобразователь 1 описывается дифференциальным уравнением первого порядка T(t)u(i)4U(t) (t), (i) где U(t) - выходной электрический сиг X(t)- входная измеряемая физическая величина; T(t)- нестационарный параметр измерительного преобразователя; коэффициент передачи, зависящий от целого ряда факторов,таких, как состояние окружающей среды, темпераауры и т.д., а также от величины выходного, сигнала iJ(t) , характеризую щего состояние измерительного прибора. При заданном значении выходного сигнала U(t} и его производной Ut определение X(t) возможно осуществить, если Заранее преположить и задать область изменения X (t) и T(t). Пусть для первого приближения X(t) и T(t) изменяются так, что в малом промежутке времени д1 они могут апроксимироваться полиномом первого порядка Xlt) Xo + c,(t4,); Tlil-T,, + pJt-t,). i При этом уравнение (1) представится в виде )U(t). + o Ht-tj. , .(2) Рассматривая систему уравнений, полученных из (2) в различные момешы 5 9549 времени-t t где , 2, 3, 4 и учи-п BaHt -t3 ij-t2 . .)-к,Х(л-, )Uli,linXo Xnui;o6,-,5 )(i,)4UU,) knXo,kn2ita Чг ( V VJ - j/ - J( - 41 ОЧ -Np -U «-Ч .to Т(,Злги%)4ЩЦ.| „Хо 1 пЗйи.. I Перенося члены с известными значениями в одну,а с неизвестными/т ft v Q ). --jл ooPioii°i IB другую сторону имеем ) -uiUl TO, U UiUpib :u H4)-linb -l n 4 J To,,.,2 Juig-k,Xorkn2ut(-Ult,); To,Ull4)p,34JuV4)-kn orKn3&toi,-U(tO-, I WI Определение значения X Q и И может быть осуществлено по значениям U (i) и {(Цзаданным в промежутке времени ut/ti-t при заданных значениях Км(ЛТ 2S согпасно уравнениям д Xj. - оС ---5 гдеДХ,Дд( и Л -детерминанты системы 34 (4), определяемые в виде ,) О-UlUо )4tU lt2)--иЩ)-К„дг ,l2uJU Hi l-Uit,)-kn24t ))-uN-Kn3&t u-ig ,) -ul4) ) -u(t,) ) ) -k, -и(ц) 0 u i4iл-ги Н,)-Kn-KH )2utUHt3) uHi4)3utu li4)-Kn- CnЗй Значения. XQ, и ot, позволяют сформировать значение X(i) в промежутке времени At согласно t X(t)-XQ,-vo(t-t;,). 10 за (6) дд j 306 - определения ) в промежутке времениAi2 tc-ta определяя в нем значения UU) и IJI{t)B моменты времени Ь 1,.где 5, 6, 7, 8, при условии tg-t/ :t7-t6 t6-t5 u задаваясь (t)Xojf.,(-t-t5); Tw-To +i a -ts),: можно составить систему уравнений, подобную системе (4), и определить XQI -v-- Г75т jOio no значениям и (t) и U Ч)дш1 i ut2 . Точно так же можно опредепить и) в других промежутках времени 12Устройство работает следующим обР, pjpjj наличии входного измеряемого сигнала X(t( на входе измерительного првобразователя 1 на выходе последнего возникает сигнал Ц (t), который оказывается связанным с Х(1) параметром Т (t) и коэффициентом передачи К, согласно уравнению (1), Выходной сигнал U (t) поступает на вход аналого-цифрового преобразовйтеля 2, преобразуясь соответственно в цифровой сигнал, который поступает на ьхоД блока 4 памяти и вход цифрового блока 3 дифференцирования. На выходе последнего получаем цифровой сигнал )j соответствующий первой производной входного сигнала 11(1). Сигнал с выхода аналого-цифрового преобразователя 2, соответствующий выходному сигналу U(i), поступает на вход цифрового функционального преобразователя 7, формирующего сигнал Kj, соответствующий коэффициенту передачи устройства в целом. Цифровые сигналы, соответствующиеО(1),и (1)и Кц поступающие в цифровой блок 4 памяти, благодаря работе блока управления 5, записываются в нем. Причем сигналы, соответствующие . и it) и ) записываются в нем через равные промежутки времени дс для моментов где 1, 2, 3, 4, т.е. uiu,uu,,u(t,),ua4) . ,),uHi,),u(t,i,(t4). После того как заканчивается проме ° времени it , {t.-t все данные блока 4 памяти вводятся по команде блока 5 управления, в арифметический блок 6, который .позволяет обеспечить опредепение XQ и ос в промежутке времени ut и тем самым значение нестационарного сигнала X It). Определение коэффициента передачи преобразователя К f, производится функ ционапьным преобразователем 7, испопьзующим известную функциональную зависимость коэффициента передачи от выхоДч ного сигнала преобразователя и соответстцующей физической величины. Для этого выходной сигнал с соответствующего датчика физической величины подводят на соответствующий вход цифрового функционального преобразователя. Предлагаемое устройство позволяет повысить точность измерения, если изменение входного измеряемого сигнала пред ложить в виде XlMXo,4o,(t-lO + lf,(i-i.l, при котором входной сигнал будет аппрок симирован полиномом второго порядка. В этом случае параметры Х(),(Х:( и у определяют при помощи соответс,твующих детерминантов йх ,Aoi,uk Д.При этом детерминанты оказываются с пятью строками и столбцами в отличие от рассмотренных выше детерминантов с четырьмя столбцами и строками. Предлагаемый корректор может быть применен при изменении температуры ере ды инерционным термодатчиком, при измерении концентрации вещества инерцисда, ными рН-метрами и ионометрами, кондуктометрами, при измерети угла поворота , объекта при помощи гироскопический и аксеперометрической сиЬтем, при измерен НИИ давления тензодатчиками и т. д., он обеспечивает высокую точность измерения указанных величин несмотря на наличие нестационарности параметра инерци-онной измеритепьной системы и непостоянство коэффициента передачи измерителя Измерение физических величин предлагаемым корректором позволяет проводить измерение физических величин при помощи инерционных измерительных преобразователей с высокой точностью и быстродействием, при этом появляется возможность качественной регулировки измеряет мого параметра в начальный момент времени при его незначительном изменеНИИ за счет управления процесса в целом, что приводит к уменьшению брака продукции, связанного с возможным контролем параметров, Экономический эффект, связанный с уменьшением брака продукции, определяет ся в рамках только одного завода десятками тысяч рублей. Формула изобретения Цифровой корректор статической и динамической характеристик инерционного измерительного преобразователя, содержащий блок дифференцирования, отличающийся тем, что, с целью повышения точности, в него введены блок управления и последовательно соединенные аналого-цифровой преобразователь, функциональный преобразователь, бпок памяти и арифметический блок, причем вход блока управления соединен с выходом аналого -цифрового преобразователя, с вторым входом блока памяти и через бпок дифференцирования - с третьим входом блока памяти, четвертый вход которого соединен с выходом блока управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 498628, кл. Q О5 В 13/02, 1976. 2.Авторское свидетельство СССР по ,заявке № 2508О84, кл. Q 05 В 13/02, 1979 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| РН-метр | 1980 |
|
SU918839A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Корректор динамической характеристики измерительного преобразователя | 1988 |
|
SU1620990A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Способ интегрального преобразования релаксационных сигналов и устройство для его осуществления | 1986 |
|
SU1695324A1 |
| Способ контроля разности частот двух синусоидальных сигналов | 1991 |
|
SU1774280A1 |
| Способ измерения амплитуды синусоидального сигнала | 1986 |
|
SU1409947A1 |
| Способ контроля разности частот | 1986 |
|
SU1345286A1 |
| Адаптивный аналого-цифровой фильтр | 1977 |
|
SU714408A1 |
| Устройство для измерения ортогональных составляющих сигнала | 1987 |
|
SU1465809A1 |

