xt
Фиг.1
ния по угловой координате и вдоль оси общего цилиндрического ярма, перпендикулярной плоскости индуктора. Двигатель содержит неподвижный ферромаг- нитный двухкоординатный индуктор 1, подвижный якорь, содержащий попарно расположенные на немагнитном основании 2 электромагнитные модули 3 с распределенными между плоскими ферро- магнитными элементами 4 управляющими обмотками, и выполненное в виде цилиндра общее ярмо 5. Примыкакчцие к ярму 5 части модулей 3 образуют цилиндрическую полость, а сами моду- ли 3 установлены попарно и с наклоном к плоскости индуктора 1 и к оси общего ярма 5 так, что плоскости ферромагнитных элементов 4, составляющих пару модулей Зд и Зв, параллельны плоскостям наклона соответственных модулей, а плоскости ферромагнитных элементов 4 другой пары модулей 3 с и Зр параллельны оси общего цилиндрического ярма 5 и перпендикулярны плоскости индуктора 1, Одновременное включение обеих пар модулей Зд и 3g, Зс и 3jj да,ет одновременное движение по двум координатам - угловой и вдоль оси общего ярма 5. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный электродвигатель | 1985 |
|
SU1359863A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Плоский двухкоординатный двигатель | 1981 |
|
SU1096739A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный электрический двигатель | 1982 |
|
SU1083302A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Многокоординатный электродвигатель | 1989 |
|
SU1695459A1 |
| Двухкоординатный линейный шаговый двигатель | 1976 |
|
SU604094A1 |
Изобретение относится к электротехнике и может быть применено в автоматических системах воспроизведения- заданных движений рабочего органа как на плоскости, так и в пространстве. Цель изобретения - расширение функциональных возможностей пу- тем обеспечения одновременного движе
Изобретение относится к электротехнике и может быть применено в автоматических системах воспроизведения заданных движений рабочего органа как на плоскости, так и в пространстве.
Целью изобретения является расширение функциональных возможностей двухкоординатного двигателя путем обеспечения одновременного движения по угловой координате и вдоль оси ярма, перпендикулярной индуктору.
На фиг 1 изображен предлагаемый двигатель, вид сверхуj на фиг. . - то же, вид сбоку.
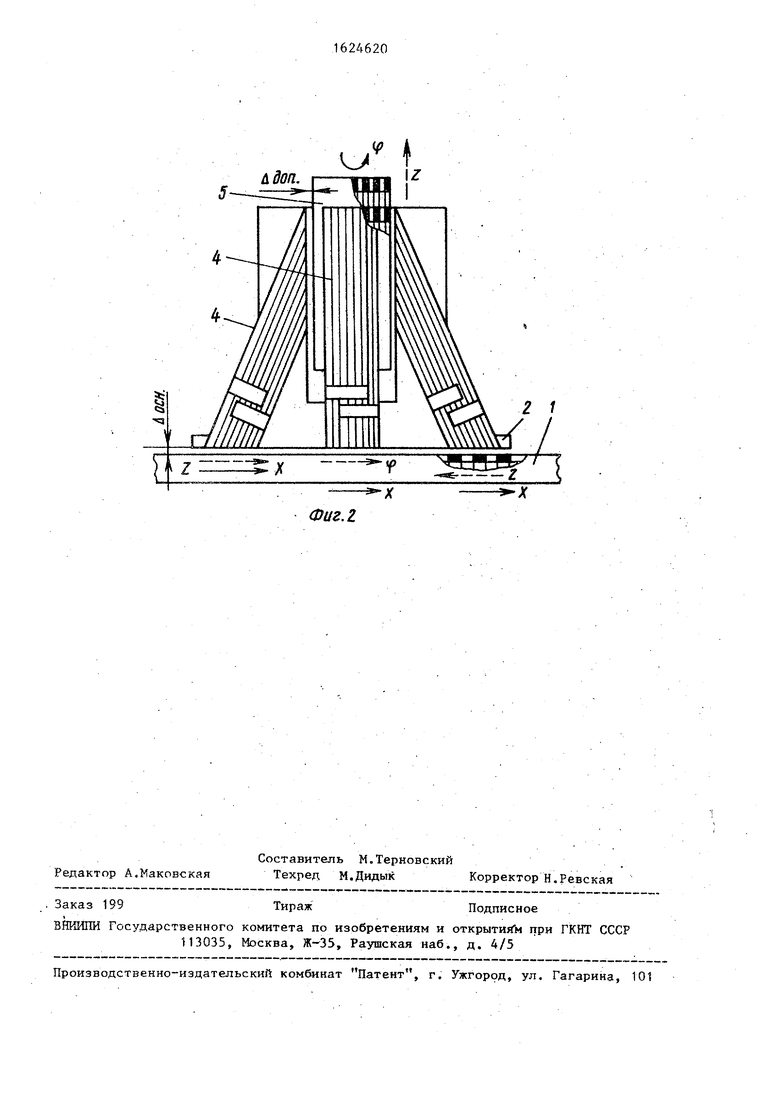
Двигатель (фиг.1) содержит неподвижный ферромагнитный двухкоординатный индуктор 1, подвижный якорь, содержар(ий попарно расположенные на немагнитном основании 2 электромагнитные модули 3 с распределенными между плоскими ферромагнитными элементами 4 управляющими обмотками и выполненное в виде цилиндра общее для четырех из восьми показанных на фиг. 1 модулей ярмо 5. Примыкающие к ярму части модулей образуют цилиндрическую полость, а сами модули установлены попарно и с наклоном к плоскости индуктора 1 и оси ярма 5 так (фиг.2), что плоскости ферромагнитных элементов 4, составляющих магнитопроводы одной пары модулей За и 36, параллельны плоскостям наклона модулей, а плоскости ферромагнитных элементов другой пары моду5
лей Зс и Зд параллельны оси ярма и
5 перпендикулярны плоскости индуктора. Прочие модули, не примыкающие к ярму 5 и на фиг. 2 не показанные, имеют плоские прямоугольные, установленные, например на клее ферро0 магнитные ярма.
На фиг. 1 и 2 стрелками указано напряжение движения по координатам X, Y, Z и q) и их название для каждого из модулей.
Двигатель работает следующим образом.
При питании обмоток якоря от м- фазного источника тока переменной частоты возникает усилие тяжения
Q электромагнитных модулей с распределенными обмотками к рабочей поверхности двухкоординатного индуктора - ему противодействует сила аэростатического поддержания от
5 газовой опоры, например, отделяющая основным воздушным зазором якорь от индуктора и обеспечивающая подвижность его относительно рабочей поверхности двухкоординатного ин0 дуктора. При изменении частоты тока за счет электромагнитного воздействия поля тока распределенных обмоток возникает усилие тяжения по соответствующей координате (X или Y) - под действием его якорь перемещает5
ся относительно неподвижного индуктора. Магнитный поток при этом замыкается через двухкоординатный неподвижный индуктор, воздушный зазор,
ферромагнитные элементы магнитопро- водов модулей и цилиндрическое ярмо, примыкающее к ним со стороны, противоположной основному воздушному зазору. Для модулей координаты Y, показанных на фиг. 1, поток замыкается через приклеенные к ним отдель- ные прямоугольные ярма. При переключнии газовой опоры якорь притягивается к рабочей поверхности двухко- ординатного индуктора, а цилиндрическое ярмо получает силу аэростатического поддержания от дополнительной газовой опоры, а значит, и дополнительный воздушный зазор по поверхности прилегающих к нему магнитопро- водов модулей и возможность перемещения относительно этих модулей.В этом случае оно (выполненное в виде единой детали) является подвижным индуктором, способным выполнять рабочее движение без каких-либо дополнительно устроенных обмоток, а лишь за счет соответствующего включения обмоток двухкоординатного двигателя. Неподвижный двухкоординатный индуктор при этом является ярмом и, значит, элементом магнитной цепи при работе подвижного индуктора по координатам Z и ( , На фиг. 1 показано, что встречное направление включения модулей За и 36 координаты X дает движение подвижного индуктора по координате %, модулей Зс и Зд - вращение по координате (j. Одновременное включение обеих пар модулей дает соответственно одновременную работу двигателя по координатам Z и Cf.
Формула изобретения
Двухкоординатный электродвигатель,
содержащий индуктор, вторичные элементы с прикрепленными к нему модулями, состоящими из ферромагнитных элементов и несущими распределенные обмотки, общее цилиндрическое ярмо,
отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения одновременно движения по угловой координате и вдоль оси, перпендикулярной
индуктору,он снабжен дополнительными по крайней мере двумя парами модулей, установленными с наклоном к плоскости индуктора,- их обращенные друг к другу поверхности образуют цилиндрическую полость, в которой размещено общее цилиндрическое ярмо, причем плоскости ферромагнитных элементов, из которых составлены магни- топроводы модулей по крайней мере одной
противолежащей пары,параллельны плоскости наклона Модулей, а по крайней мере еще одной пары модулей перпендикулярны плоскости индуктора и параллельны оси общего цилиндрического
ярма.
л доп.
Фиг.2
-х
| Двухкоординатный электродвигатель | 1985 |
|
SU1359863A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
