Ф14г.1
Изобретение относится к электротехнике, а имерно к электрическим машинам, и может быть использовано в графопостроителях координатографах, промышленных роботах, машинах термической резки и т.д.
Известны двухкоординатные линейные электродвигатели с плоским рабочим зазором.Двигатели этого типа содержат обш,ую для обеих координат зубчатую пластину из магнитомягкого материала 1.
Недостатком известных двигателей являются ограниченные возможности, поскольку они обеспечивают получение только двухкоординатного движения на плоскости.
Наиболее близким к предлагаемому по технической суш.ности является двухкоординатный электрический двигатель, содержаш,ий неподвижный индуктор и два подвижных якоря, связанных между собой жестким V-образным стержнем, укрепленным с возможностью перемеш,ения в опорах обоих якорей 2.
Недостатком указанного двигателя является невозможность получения сложного трехкоординатного движения на плоскости.
Цель изобретения - расширение функциональных возможностей двухкоординатного двигателя за счет получения движения по третьей координате.
Поставленная цель достигается тем, что в двухкоординатном электрическом двигателе, содержаш,ем неподвижный индуктор и два основных подвижных якоря, связанных между собой основным жестким V-образным стержнем, укрепленным с возможностью перемещения в опорах обоих якорей, неподвижный индуктор выполнен в виде кольца, а опоры обоих якорей выполнены поворотными относительно оси, перпендикулярной плоскости стержня.
Кроме того, введены дополнительные два якоря и V-образный стержень, аналогичные основным, причем дополнительный и основной стержни жестко соединены между собой вершинами в одной плоскости.
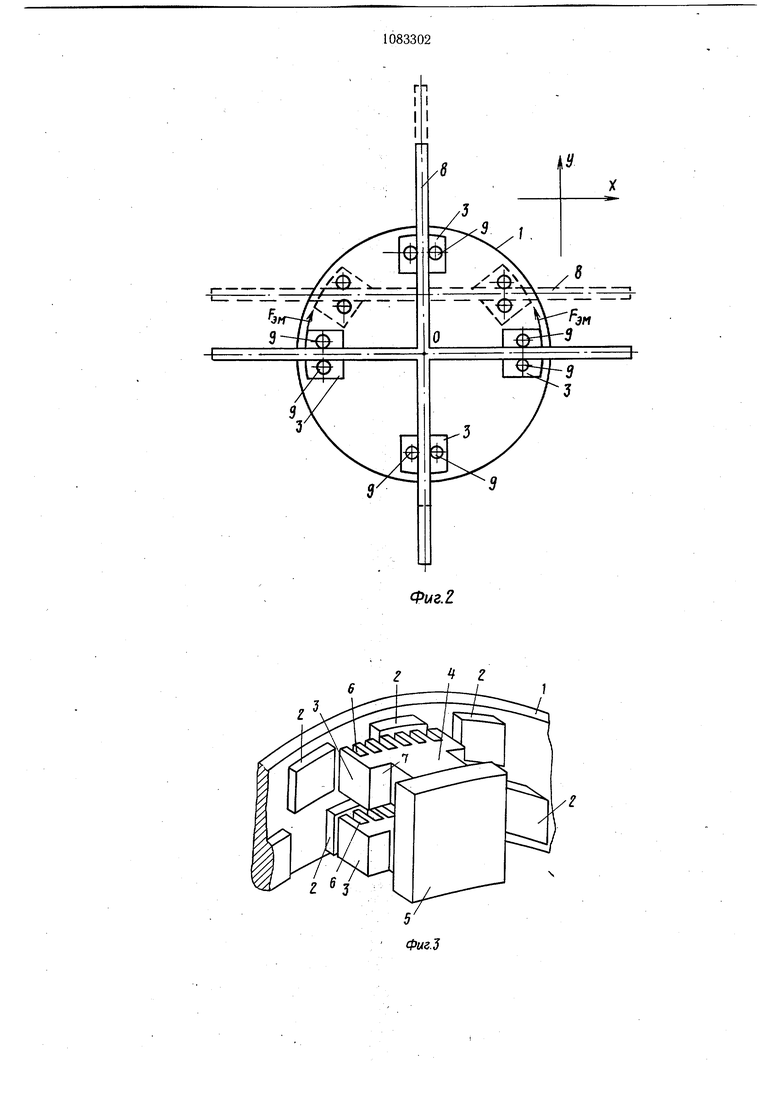
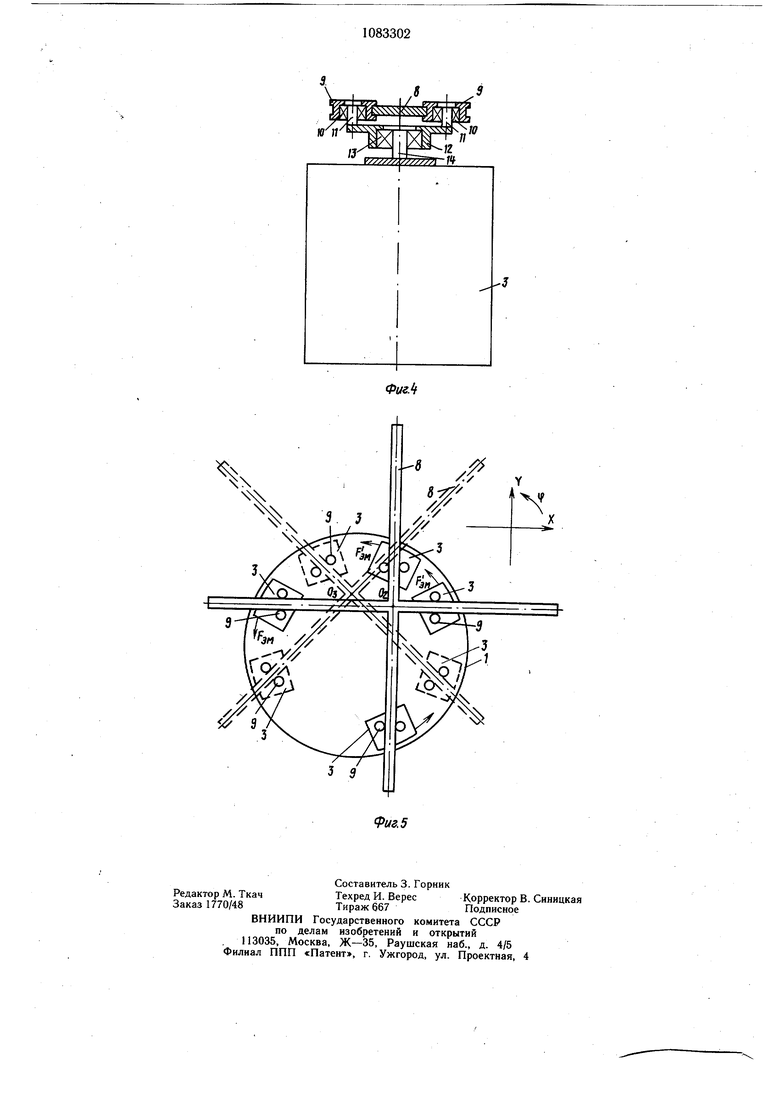
На фиг. 1 схематично изображен двигатель с одной парой якорей и V-образным стержнем; на фиг. 2 - двигатель с двумя парами якорей и крестообразным стержнем (отработка декартовых координат); на фиг. 3 - якорь двигателя; на фиг. 4 - крепление опор качения на якоре двигателя; на фкг. 5 - отработка вращения подвижного
элемента двигателя (вращение креста в заданном направлении).
Неподвижная часть двигателя (фиг. 1) представляет собой ферромагнитное кольцо 1, часть которого показана на фиг. 3 совместно с якорем для одной координаты. Ферромагнитное кольцо 1 несет на своей поверхности, обращенной к подвижному модулю (внутренней или внешней), полюсообразующие выступы 2, формирующие ос0 новное магнитное поле двигателя. Подвижный якорь 3 представляет собой объединение двух Т-образных магнитопроводов 4, укрепленных на основании 5 (фиг. 3). Т-образные магнитопроводы имеют пазы 6 для укладки
, якорной обмотки, а их крепление на основании 5 образует пазы 7 для размещения обмоток возбуждения.
Подвижный якорь 3 (фиг. 1) условно показан в виде прямоугольного блока. Подвижный стержень 8 перемещается в опорах
0 качения, выполненных, например, в виде роликов 9, вращающихся на подшипниках 10 качения, посаженных на оси 11, укрепленные на площадке-основании 12 (фиг. 4). Площадка 12 свободно вращается на подшипнике 13 качения (радиально-упорном или упорном), укрепленном на оси 14.
Двигатель работает следующим образом.
Предположим, что подвижный элемент
Q должен перемещаться так, чтобы его вершина Oi заняла положение Oj. Для реализации этого движения подается напряжение на обмотки возбуждения и управления якорей 3. Последние, развивая задаваемые системой управления электромагнитные усилия
5 РЭМ, и РЗ на1Гинают смещаться против часовой стрелки, при движении якорей электромеханические коллекторы или полупроводниковые коммутаторы коммутируют секции обмоток управления таким образом, чтобы направления сил Py и их величины
0 сохранялись. Это обеспечивает перемещение вершины из положения Oj в положение Од по заданной траектории Oi-РЗ, показанной пунктиром. Датчики положения (не показаны), входящие в систему обратной
5 связи, фиксируют приход в заданную точку и дают управляющий импульс на остановку якорей 3 двигателя. Подвижный элемент 3 двигателя может вращаться в процессе отработки координатного задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU983927A2 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| Двухкоординатный шаговый электродвигатель | 1983 |
|
SU1201971A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Двухкоординатный электродвигатель | 1988 |
|
SU1624620A1 |
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
1. ДВУХКООРДИНАТНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ, содержащий неподвижный индуктор и два основных подвижных якоря, связанных между собой основным жестким V-образным стержнем, укрепленным с возможностью перемещения в опорах обоих якорей, отличающийся тем что, с целью расщирения функциональных возможностей за счет получения движения по третьей координате, неподвижный индуктор выполнен в виде кольца, а опорыобоих якорей выполнены поворотными относительно оси, перпендикулярной плоскости стержня. 2. Двигатель по п. 1, отличающийся тем, что введены дополнительные два якоря и V-образный стержень, аналогичные основным, причем дополнительный и основной стержни жестко соединены между собой вершинами в одной плоскости. (Л 00 со со о to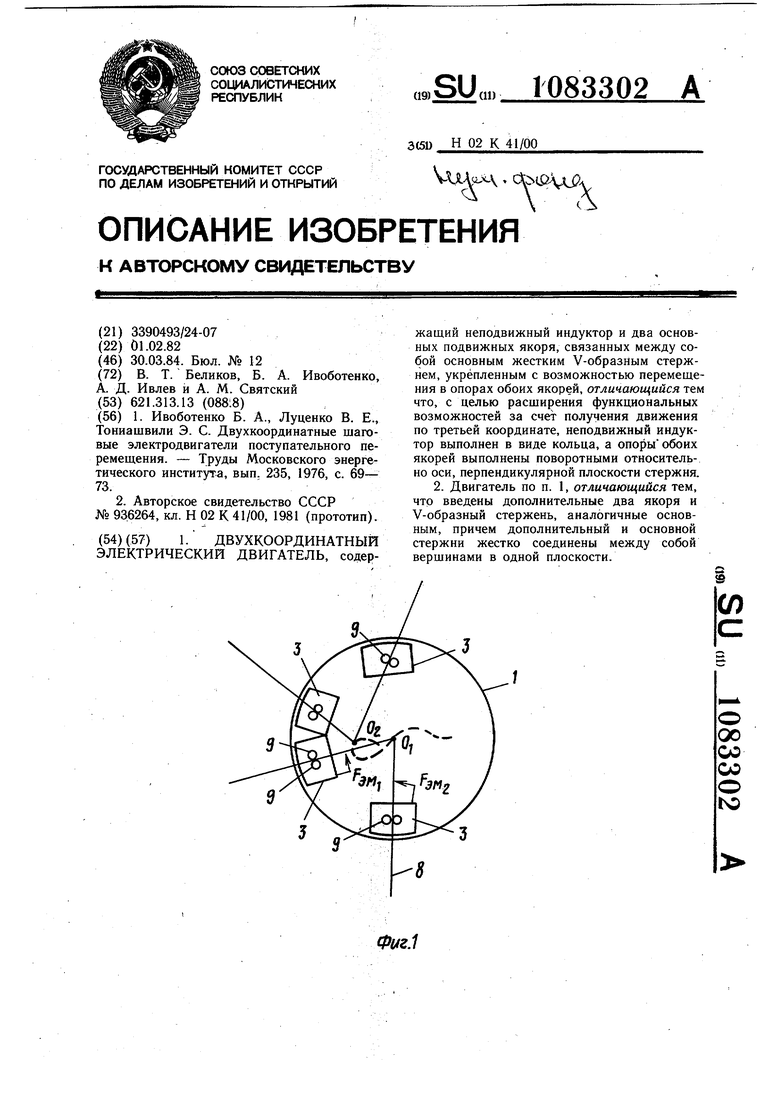
г г
,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ивоботенко Б | |||
| А., Луценко В | |||
| Е., Тониашвили Э | |||
| С | |||
| Двухкоординатные шаговые электродвигатели поступательного перемещения | |||
| - Труды Московского энергетического института, вып | |||
| Упругая металлическая шина для велосипедных колес | 1921 |
|
SU235A1 |
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Двухкоординатный линейный электрический привод | 1980 |
|
SU936264A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
