Изобретение относится к устройствам для автоматизации землеройных и других строительных машин, в частности к устройствам для измерения высотного положения рабочего органа дреноукладчиков относительно копирной линии.
Целью изобретения является повышение производительности машины.
На фиг. 1 изображена схема гидравлического демпфера; на фиг. 2 - вариант гидравлического демпфера.
Подвеска 1 датчика высотного положения крепится на поворотной опоре 2, жестко связанной с рабочим органом 3 землеройной машины. Датчик высотного положения 4 установлен на корпусе подвески. На тросиках 5 подвешены в цилиндрах 6 поршни 7. Верхние и нижние полости цилиндров 6 соединены каналами 8 и 9. В месте их соединения установлены клапаны 10 с инерционно-приводным запорным элементом. Наиболее целесообразным является размешение инерционной массы на поворотной опоре 2 или вблизи любой другой точки, расположенной на горизонтали, проходяшей через ось поворотной опоры, где действие инерционных сил максимально. В связи с этим практически инерционную массу удобно расположить в верхней части цилиндров 6, где обеспечивается возможность подсоединения запорного элемента к верхней полости цилиндра.
В случае использования клапана в виде поворотного крана инерционной массой служит маятник с грузом 11, а запорным элементом - проходной поворотный кран 12 (фиг. 1).
В случае использования клапана в виде шарика с седлом инерционной массой служит шарик 13, помещенный в конусообразную лунку 14, а запорным элементом - шарик 13 и седло 15 канала 9 (фиг. 2).
При отсутствии инерционных возмушений подвеска датчика высотного положения 1 (фиг. 1) и инерционные массы клапанов 10 занимают устойчивое среднее положение. В этом положении запорные элементы клапанов сообшают каналы 8 и 9 между собой и, тем самым, соединяют верхнюю и нижнюю полости цилиндров 6.
В связи с этим при наклоне рабочего органа 3 поршни 7 свободно перемешаются в цилиндрах 6 и не увлекают за собой корпус подвески 1. В этом случае датчик высотного положения 4 изменяет свое вертикальное положение только при опускании и подъеме рабочего органа, а при наклоне последнего не меняет свою высотную координату.
При действии на рабочий орган инерционных возмушений подвеска датчика высотного положения перемещается вокруг своей поворотной опоры 2, например, по часовой стрелке. Повороту подвески препятствует правый поршень 7, при этом другой поршень благодаря односторонней связи перемещается вместе с подвеской, постепенно погружаясь в жидкость.
Одновременно, при действии инерционных возмущений перемещается инерционная масса клапана 10, и запорный элемент последнего перекрывает каналы 8 и 9.
При этом скорость перемещения подвески 1 относительно порщня замедляется,
5 и начальное отклонение подвески снижается, тем самым снижается ошибка измерения вертикальной координаты положения рабочего органа относительно копирной линии.
В случае использования инерционной
0 массы в виде маятника с грузом 11 (фиг. 1) стержень маятника жестко соединяется с поворотным краном. При отсутствии инерционных возмущений маятник 11 занимает вертикальное положение, а поворотный кран
5 12 сообщает между собой верхнюю и нижнюю полости цилиндра. При действии инерционных возмущений груз маятника 11 отклоняется, поворотный кран поворачивается и перекрывает каналы 8 и 9, запирая верхнюю и нижнюю полости цилиндра, этим
0 обеспечивается замедление перемещающейся подвески относительно снижения поршня и первоначального отклонения подвески.
В случае использования инерционной массы в виде щарика 13 (фиг. 2) последний устанавливается в конусообразную лунку 14, что обеспечивает устойчивое среднее положение шарика. В этом положении верхняя и нижняя полости цилиндров сообщаются между собой. При действии инерционных возмущений шарик 13 перемещается
0 до соприкосновения с седлом 15 и перекрывает каналы 8 и 9, запирая верхнюю и нижнюю полости цилиндров, что обеспечивает замедление перемещения подвески относительно порЩня и снижение первоначального отклонения подвески.
При изменении поперечного наклона рабочего органа в отсутствии инерционных помех запорные элементы не перекрывают каналы 8 и 9 и перемещения поршней не вызывают изменений углового положения
0 подвески, датчик высотного положения не меняет свою высотную координату при изменении поперечного наклона рабочего органа.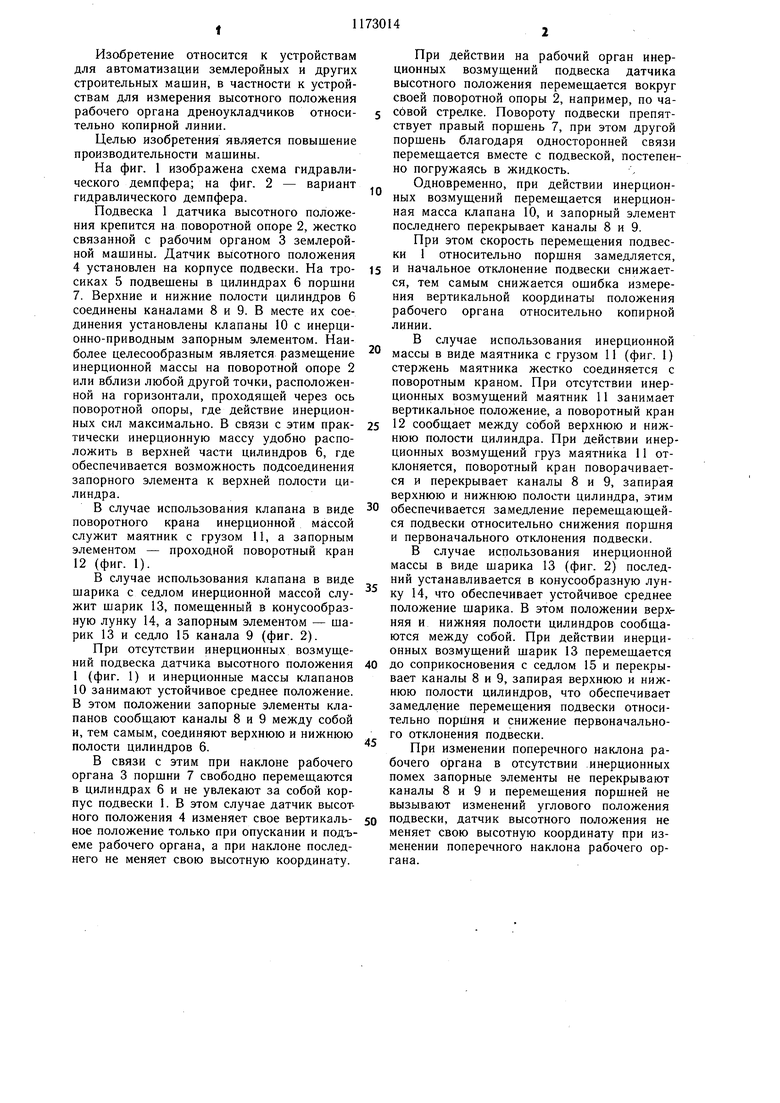
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ДАВЛЕНИЯ В ПОТОКЕ ТЕКУЧЕЙ СРЕДЫ | 1991 |
|
RU2016343C1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| КЛАПАН ЗАПОРНЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 2010 |
|
RU2477408C2 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2482347C2 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
1. ГИДРАВЛИЧЕСКИЙ ДЕМПФЕР ДЛЯ МАЯТНИКОВОЙ ПОДВЕСКИ ДАТЧИКА ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНОЙ МАШИНЫ по авт. св. № 827707, отличающийся тем, что, с целью повышения производительности машины, верхняя и нижняя полости каждого цилиндра сообщены между собой посредством канала, который снабжен клапаном с инерционно-приводным запорным элементом. 2.Демпфер по п. 1, отличающийся тем, что запорный элемент клапана выполнен в виде поворотного крана с жестко связанным маятником: 3.Демпфер по п. 1, отличающийся тем, что запорный элемент клапана выполнен в виде шарика, а корпус клапана с конусообразной лункой. & (Л
| Гидравлический демпфер для маятниковойпОдВЕСКи дАТчиКА пОлОжЕНия РАбОчЕгООРгАНА зЕМлЕРОйНОй МАшиНы | 1979 |
|
SU827707A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
