-г
fe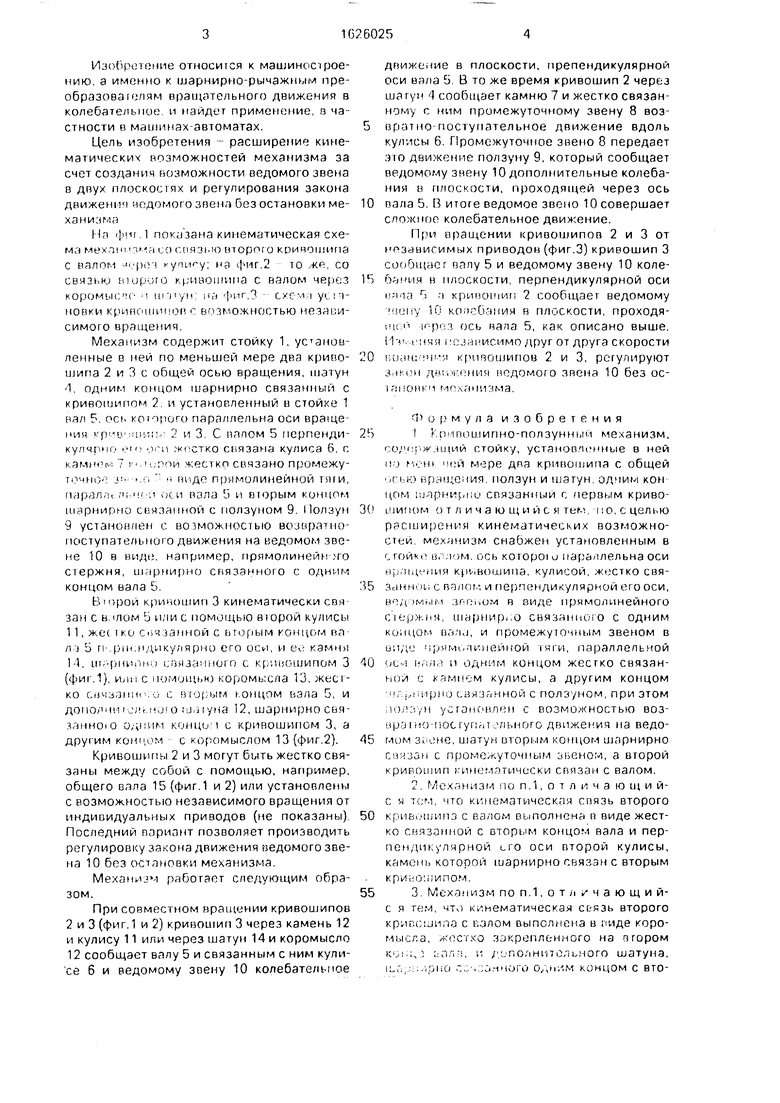
| название | год | авторы | номер документа |
|---|---|---|---|
| Кривошипный механизм | 1990 |
|
SU1789800A1 |
| Шарнирно-рычажный механизм | 1989 |
|
SU1696796A1 |
| Шарнирно-рычажный механизм | 1988 |
|
SU1566127A1 |
| Рычажно-зубчатый механизм для преобразования вращательного движения в сложное | 1988 |
|
SU1566130A1 |
| Кривошипно-ползунный механизм | 1988 |
|
SU1537922A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Зубчато-рычажный кулисный механизм с выстоем ведомого звена | 1979 |
|
SU903628A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1997 |
|
RU2132987C1 |
Изобретение относится к шарнирно-ры- чажным преобразователям вращательного движения в колебательное и найдет применение, в частности, в машинах-автоматах. Цель изобретения - расширение кинематических возможностей механизма за счет создания возможности движения ведомого звена в двух плоскостях и регулирования закона движения ведомого звена без остановки механизма. При совместном вращении кривошипов кривошип 3 сообщает валу 5 и шарнирно связанному с ним ведомому звену 10 колебания в плоскости, перпендикулярной оси вала 5, а кривошип 2 сообщает ведомому звену 10 колебания в плоскости, проходящей через ось вала 5, т.е. звено 10 совершает сложное колебательное движение. При вращении кривошипов 2 и 3 от независимых приводов путем изменения скоростей их вращения регулируют закон движения звена 10 без остановки механизма. 4 з.п. ф-лы, 3 ил.
12
Фиг 1
11
/
Изобретение относится к машиностроению, а именно к шарнирно-рычажным пре- образоваюлям вращательного движения в колебательное и найдет применение, в ча стности в машинах-автоматах.
Цель изобретения - расширение кинематических возможностей механизма за счет созданич возможности ведомого звена в двух плоскостях и регулирования закона движенпч нодомого звена без остановки механизма
На 1 показана кинематическая схема мех т LO спчзь о второго криношипа с валом купину, на фмг 2 то -КР, со связью tii jp.)ro сривошипа с валом через
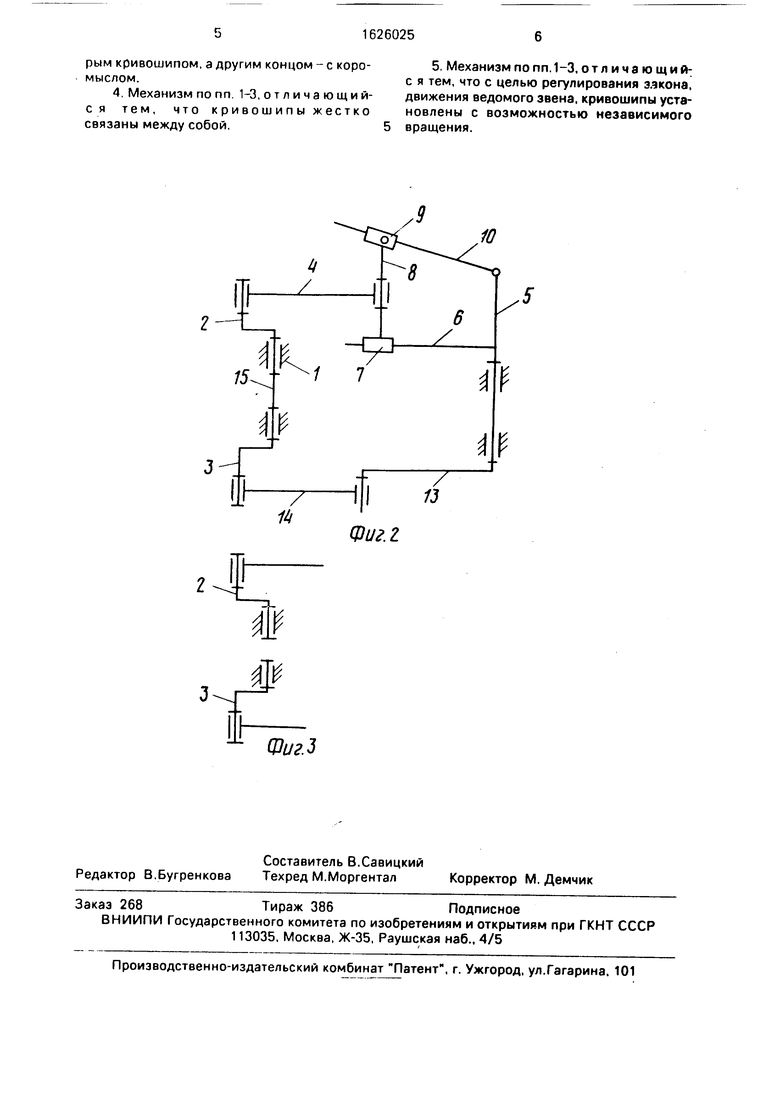
КОрОМЫ(,г ШЧ1/1 1 СХГ 1 I у(. Чновки криш шипор г в пможностью независимого вращения
Механизм содержит стойку 1, усыновленные в ней по меньшей мере два кривошипа 2 и 3 с общей осью вращения, шатун одним концом шарнирно связанный с кривошипом 2 и установленный в стойке 1 вал 5 ось которого параллельна оси вращения пит 2 и 3 С вапом 5 перпендикулярно н«- orii ж стко сьязана кулиса 6, с камно 7 i РОИ жестко связано промежуточно- . ч НИДР прямолинейной тяги, ПгфгЗл-ic л( . 01 и вала и и вторым концом шарнирно связанной с ползуном 9 Ползун 9 установлен с возможностью возвратно- поступательною движения на ведомом звене 10 в виде, например, прямолинейн ;го стержня, иырнирно связанного с одним концом вала Ь
Вюрои крикошип 3 кинематически свя зам с в том Ь или с помощью вюрой кулисы 11, же( т о с пч занной с вторым концом в а л j о п рн ндикулярно его оси, п сч- камня
1-1, Шг-рНИОно СГ(ЯЗ.ЧЧНО О С. КрИиОШИПОМ 3
(фи( .1), или с помощью коромысла 13, жеС1- ко ( и с Bfjj ым (онцом ьэла 5, и дополни i :; HJI о и J i ума 12, шарнирно свя- VJHHOIO о, кинци i с кривошипом 3, а друтим концом L i-оромыслом 13 (фиг 2).
Кривошипы 2 и 3 могут быть жестко связаны между собой с помощью, например, общего вала 15 (фиг.1 и 2) или установлены с возможностью независимого вращения от индивидуальных приводов (не показаны) Последний вариант позволяет производить регулировку закона движения ведомого звена 10 без остановки механизма.
Механизм работает следующим образом.
При совместном вращении кривошипов 2 и 3 (фиг. 1 и 2) кривошип 3 через камень 12 и кулису 11 или через шатун 14 и коромысло 12 сообщает валу 5 и связанным с ним кулисе 6 и ведомому звену 10 колебательное
движение в плоскости, препендикулярной оси оала 5 В то же время кривошип 2 через шагун - сообщает камню 7 и жестко связанному с ним промежуточному звену 8 возвратно поступательное движение вдоль кулисы 6 Промежуточное звено 8 передает эю движение ползуну 9, который сообщает ведомому звену 10 дополнительные колебания в плоскости, проходящей через ось
пала 5. В итоге ведомое звено 10 совершает сложное колебательное движение.
При вращении кривошипов 2 и 3 от независимых приводов (фиг.З) кривошип 3 сообщает валу 5 и ведомому звену 10 колеiVjunu в плоскости, перпендикулярной оси РМ.ЬЧ г -ч крипошип 2 сообщает ведомому шиу 10 ксы(Утия в плоскости, проходя- i u м i Р з ось чала 5, как описано выше. i t нчя I .j Hi HCiiMO друг от друга скорости
ыкт; - н-я кривошипов 2 и 3, регулируют з )рн дв;,ч снп 1 ведомого звена 10 без ос- I , ;i От- и м° лничма
Формула изобретения
I п вошипно-ползунныи механизм,
о/ч-,jҐ нлий стойку, устаноппснные в ней uj г н.н ней мере два криво иипа с общей )( мо вращения ползун и шагун одчим кон цом i.japHiipi.u связанный c первым кривоL JHDOM о т л и ч а ю щ и и с я тем по, с целью расширения кинематических возможностей механизм снабжен установленным в сгоих 1 вг i /м ось Koropoi о параллельна оси ни пц - ния KpviBoijLjnna. кулисой, жестко связлим а, с вчлог , и перпендикулярной о го оси, )м,1м ,oM в виде прямолинейного cie,, шарнир о связаншло с одним киицог ва и, и промежуточным звеном в ипде |рям1.. Н неинои 1Я1и, параллельной
OL- Им л,1 п одним концом жестко связанной с K iMHtM кулисы, а другим концом . j.mipHo связанной с полз/ном, при этом
1И,М,Н у ГЭнГ ВПеН С ВОЗМОЖНОСТЬЮ ВОЗнр лно nocryrirjT.vibnoro движения на ведо- MOM 3i one, шатун вторым концом шарнирно С нзан с промежуточным зьеном, а второй кривошип гиномятически связан с валом.
2 Me чнизм мо п.1, о т л и ч а ю щ и й- с я тем что кинематическая связь второго кривчшипз с ва/юм выполнена в виде жестко связанной с вторым концом вала и перпендикулярной его оси второй кулисы, камень которой шарнирно связан с вторым
КрИ1 01иИПОМ
3 Механизм по п.1, о т л / ч а ю щ и йс я гем, что кинематическая сеязь второго криг.сиила с взлом выполнена в 1 иде коро- мыила, /к -сгхо г кропленного на агором K jti,1. t.iT:, п ; и.полн11толь,чого шатуна.
П.. Г., 1,01.0 - ,йчНОГО ОдМ..М КОНЦОМ С ВТОрым кривошипом, а другим концом - с коромыслом.
4, Механизм по пп. 1-3, отличающийся тем, что кривошипы жестко связаны между собой.
11
Фиг.З
ъ
Фиг. 2
| Кожевников С.Н | |||
| Механизмы | |||
| - М.: Машиностроение, 1976, с | |||
| Горный компас | 0 |
|
SU81A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
