Фе/г.1
.
-
rirLL-jЈ.L
r T N- )-4 - Фе/г.1
-,
16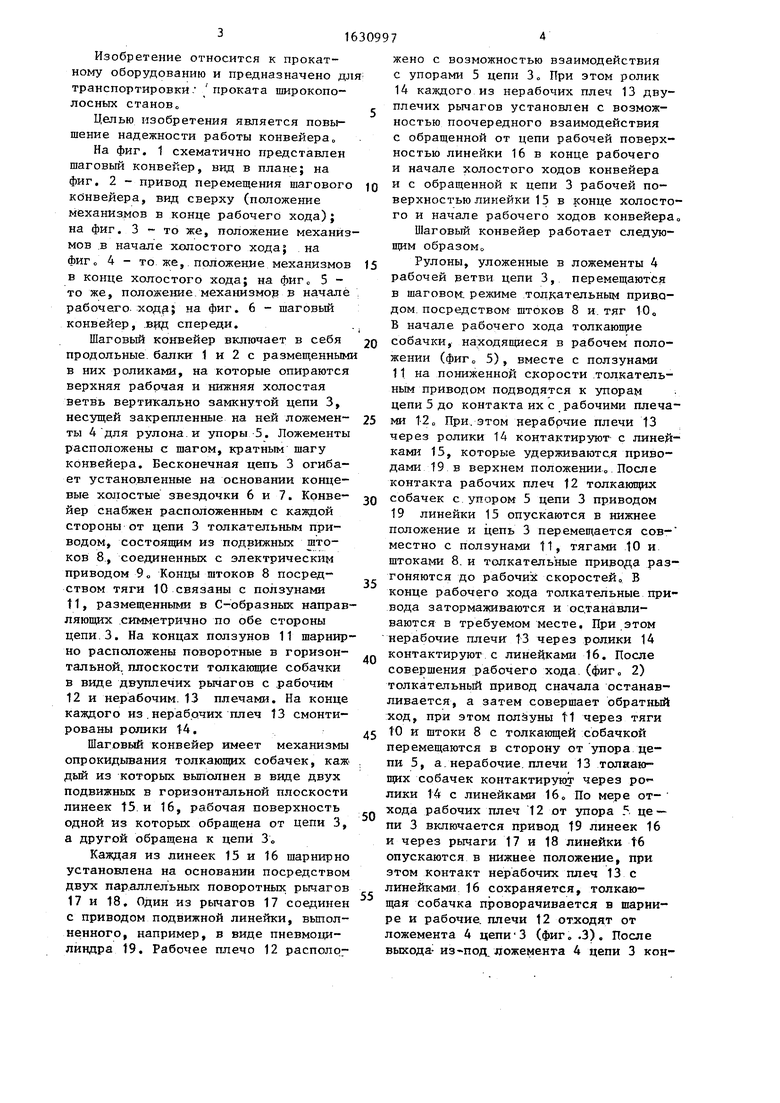
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1985 |
|
SU1305084A1 |
| Привод шагового конвейера | 1987 |
|
SU1523480A1 |
| Штанговый конвейер | 1978 |
|
SU763216A1 |
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| УГОЛЬНЫЙ СТРУГ | 1967 |
|
SU192133A1 |
| Цепной привод шаговой подачи заготовок в рабочую зону обрабатывающей машины | 1985 |
|
SU1268255A1 |
| Устройство для перемещения грузов | 1981 |
|
SU1066911A1 |
| Устройство для клеймения | 1979 |
|
SU812380A1 |
| Приспособление к прессам для автоматической толчковой подачи листового металла | 1933 |
|
SU32469A1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
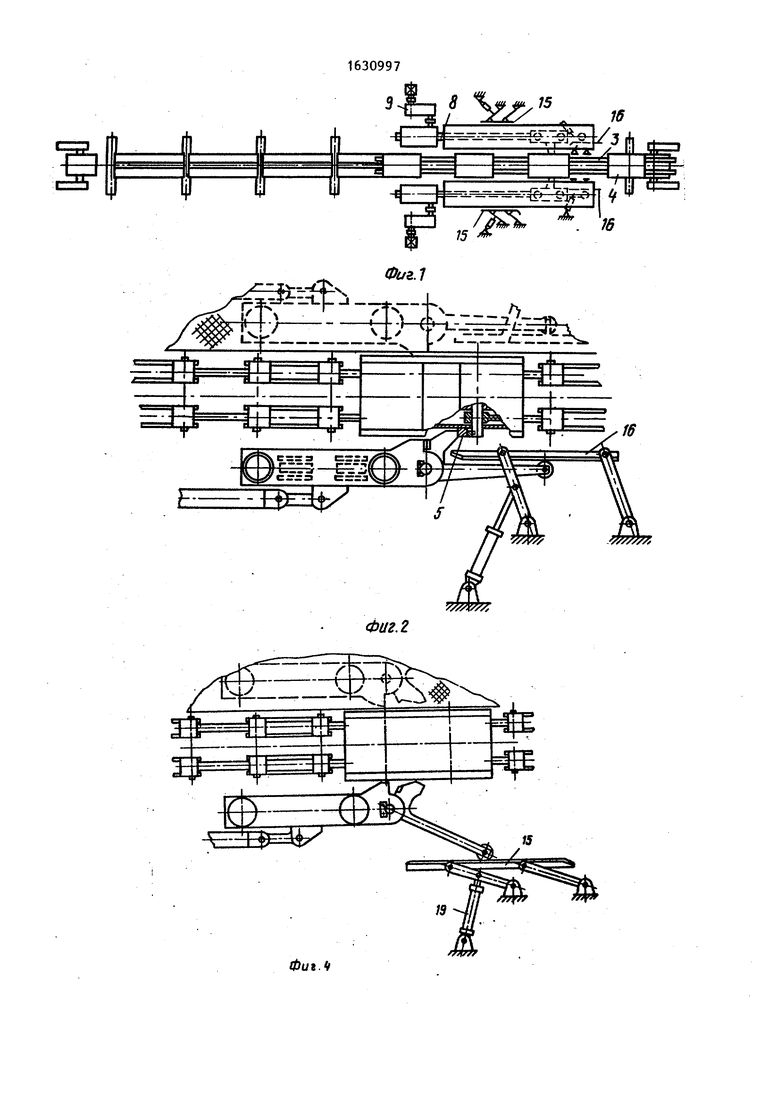
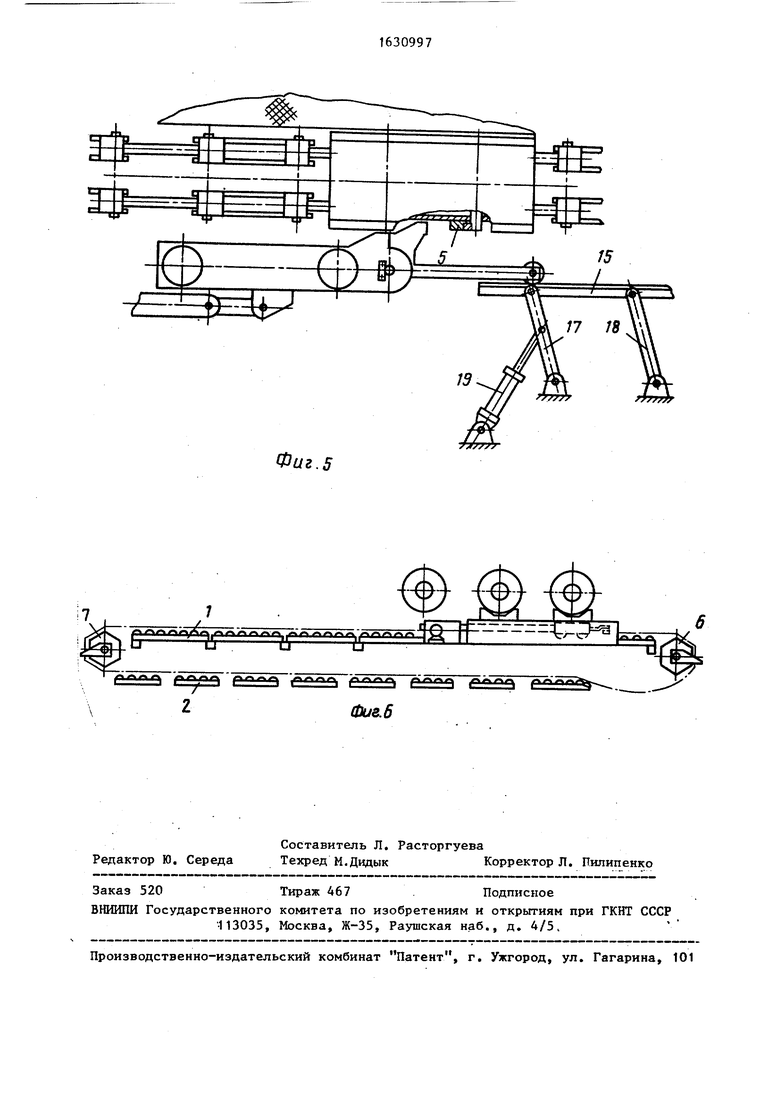
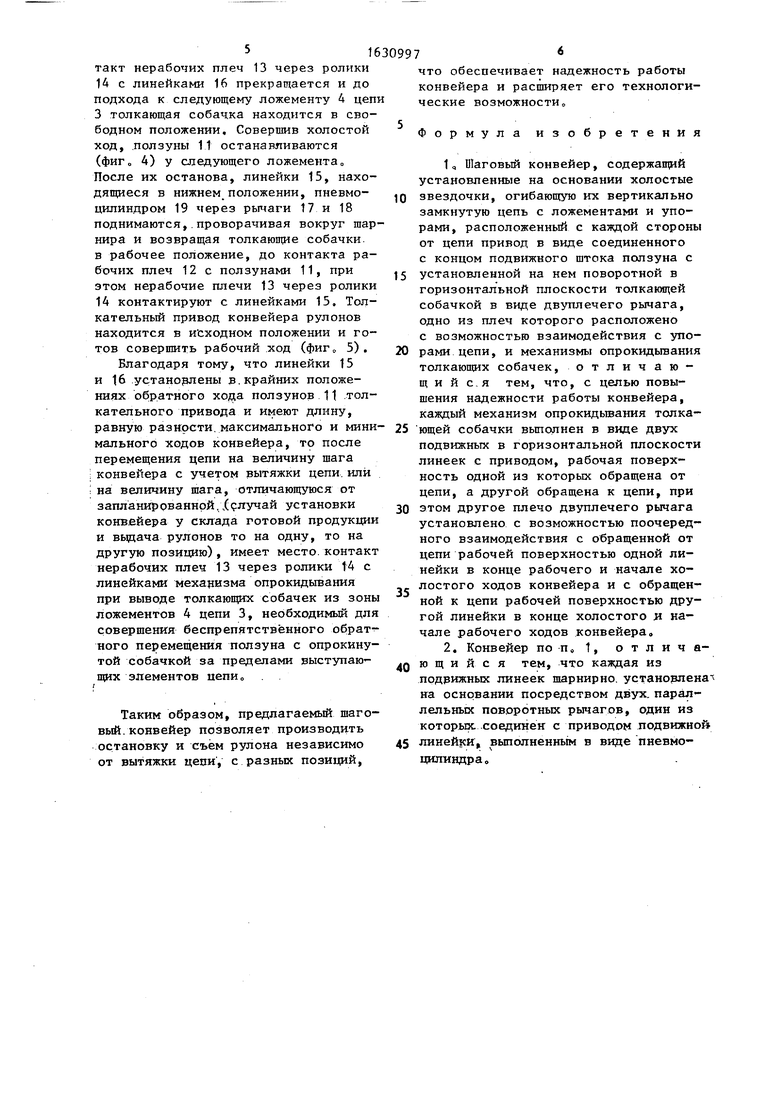
Изобретение относится к транспортному оборудованиюо Цель изобретения - повышение надежности работы конвейера. На продольных балках размещены ролики (Р), на которые опирается цепь, несущая ложементы и упорьи Цепь огибает звездочки„ С каждой стороны от цепи расположен привод в виде соединенного с концом подвижного штока 8 ползуна (П) 11 с установленной на нем в горизонтальной плоскости собачкой в виде двуплечих рычагов. На конце каждого из нерабочих плеч 13 смонтированы Р 14. Механизм опрокидывание собачки выполнен в виде линеек, которые шарнирно установлены на основании посредством двух параллельных рычагов. При этом Р 14 каждого из нерабочих плеч 13 взаимодействует с обращенной от цепи рабочей поверхностью лнчечки в конце рабочего и начале холостого ходов конвейера и с обращенной к цепи рабочей поверхностью линейки в конце холостого и начале рабочего ходов конвейера. Нерабочие плечи 13 через Р 14 контактируют с линейками 15, удерживаемыми в верхнем положении0 После контакта рабочих плеч 12 с упором цепь перемещается совместно с П 11, происходит рабочий ход о При обратном ходе П 11 перемещаются от упора цепи, а нерабочие плечи 13 контактируют через Р 14 с линейками 16„ 1 з0п ф-лы, 6 ил„ s tf С
Фиг. Ч
Фиг.I
Фиг.5
Фиг. 6
| Шаговый конвейер | 1985 |
|
SU1305084A1 |
