2. Устройство по п. 1, отличающееся тем, что каждое плечо трехплечего рычага на конце имеет ролик.
3. Устройство по п. 1, о т л ичающееся тем, что каждый из упоров выполнен с выступом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для завертывания прямоугольных предметов | 1981 |
|
SU977287A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
| Автоматический магнитный захват | 1982 |
|
SU1051029A1 |
| Кулачково-рычажный механизм подачи устройства для обработки деревянных заготовок | 1983 |
|
SU1167005A1 |
| Устройство для установки радиоэлементов, преимущественно микросхем, на печатную плату | 1988 |
|
SU1662031A1 |
| Консольная траверса | 1991 |
|
SU1754618A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Механизм переключения муфты реверсивного редуктора привода валкообразующего транспортера жатки | 1978 |
|
SU791315A1 |

1. УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, содержащее установленный с возможностью возвратно-поступательного перемещения толкатель с двумя шарнирно закрепленными на нем разнонаправленными упорами однострронн-его действия и механизм установки упоров с рычагом .переключения упоров, уста- . новленным на толкателе, ограничителями поворота рычага и шарнирно связанными с неподвижным основанием и между собой ПРИВОДОМ и переключателем рычага, отличающееся тем,что, с целью расширения технологических возможностей конвейера, переключатель рычага выполнен в виде пластины с разновысокими кулачками, котор ая установлена на оснований посредством параллельных рычагов, при этом упоры закреплены на толкателе посредством параллельных осей, а рычаг переключения выполнен трех- § плечим и, два плеча рьлчага расположе(Л ны с возможностью взаимодействия с соответствукадим упором, а третье плечо - с кулачками пластины. о О5 о со
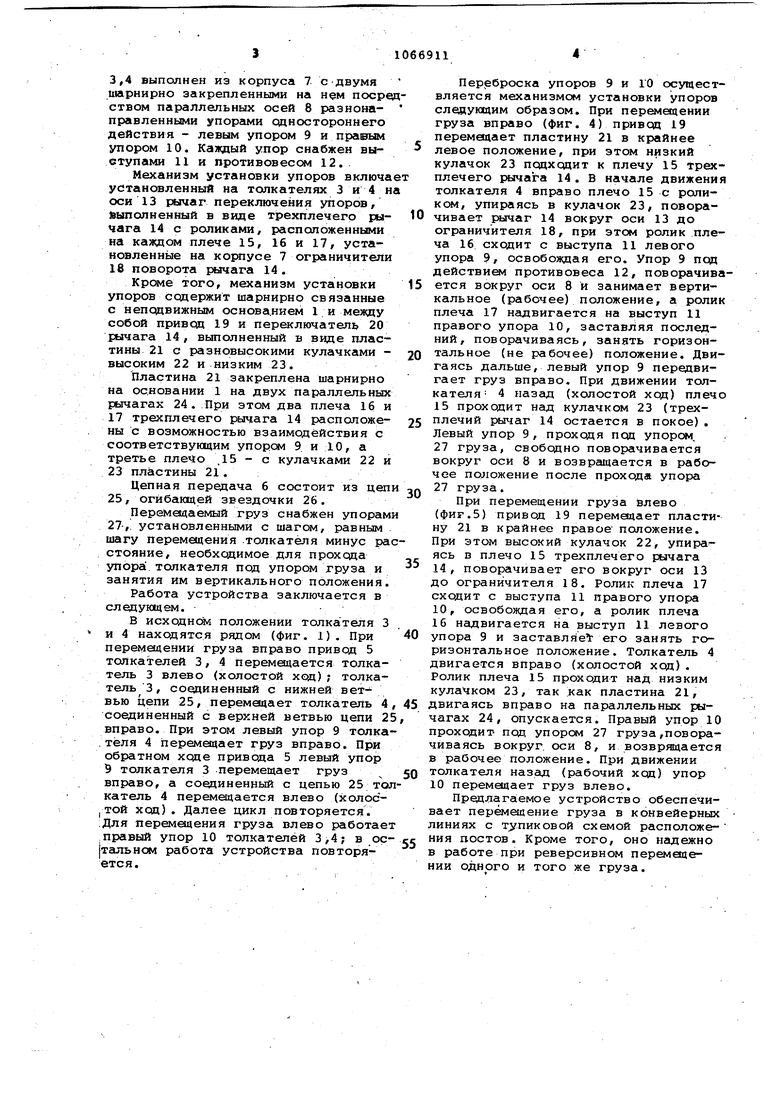
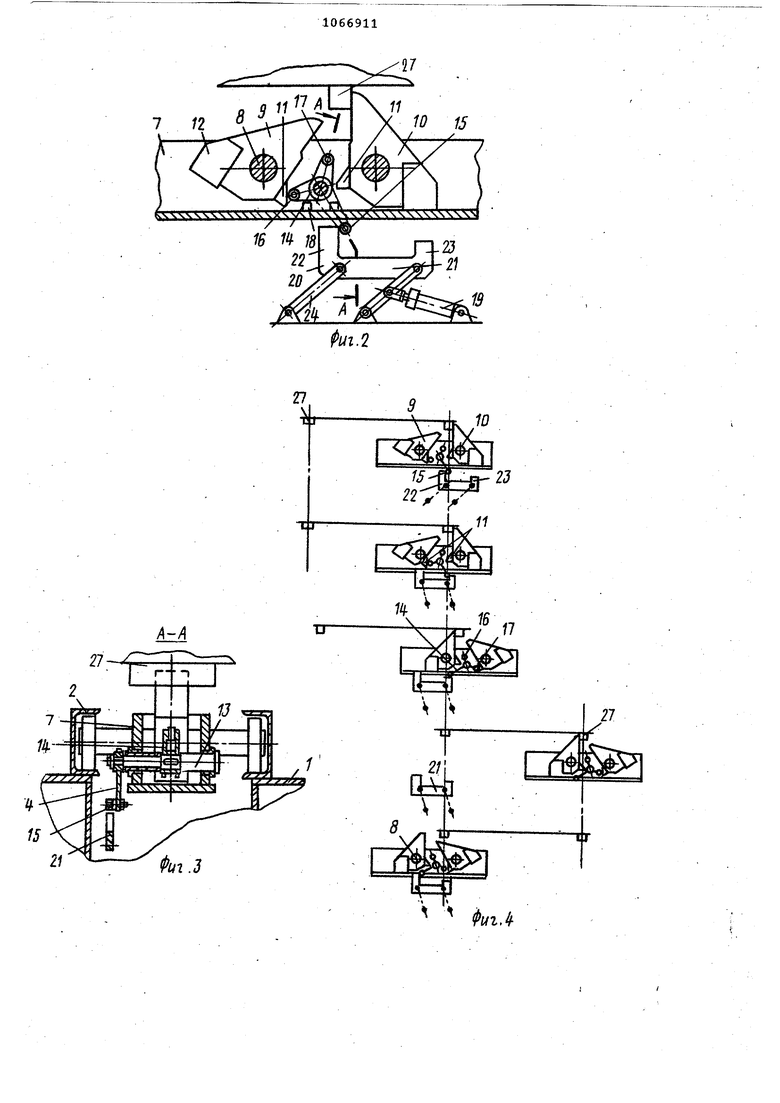
Изобретение относится к Технологической оснастке предприятий строительной индустрии и предназначено для перемещения грузов, например, форм-вагонеток на технологических постах. Известно устройство для перемещения грузов, с сдержат ееТОЛК а т ель с упорами, взаимодействующими на груз поочередно, и механизм установки упо ров с приводом СП. Однако при расположении привода механизм установки упора на толкателе возникает неудобство подводки к нему энергии и снижается надежност работы, тик как при перемещении толкателя псявсщящие шланги (гидро, Пневмо и т.д.) быстро выходят из строя. В случае рсположения привода механизма установки упоров отдель но от оттока толкателей возникает сложность в обеспечении их совместной работы. Кроме того, в рассматриваемом предложении не решен вопрос об уменьшении простоя груза при холостом ходе толкателя. Наибсшее близким к изобретению является устройство для перемещения грузов, ссдержащее установленный с возможностью возвратно-поступательного перемещения толкатель с двумя . шарнирно закрепленными на нем разнонаправленными упорами одностороннег действия и механизм установки упоров с рычагом переключения, упоров, установленным на толкателе/ ограничителями поворота рычага и шарнирно связанными с неподвижным основанием и между собой приводом и переключателем jaj4ara t21. Известное устройство не обеспечивает перемещение груза в конвейерных линиях с тупиковой схемой расположения постов. Это происходит потому, что ход привода перемещения толкателя постоянен, соответствуя шагу пер мещения груза, и в случае установки устройства в тупиках реверсивное перемацение груза не произойдет, поскольку упоры установлены на одной общей оси и не обеспечивается возможиость заведения упора за выступ груза в конце хода привода толкател в результате того, что ход привода уже окончен. Кроме того, устройство не обеспечивает реверсивное перемещение одного и того же груза, поскольку невозможно переключение упоров из-за того, что один из них постоянно контактирует с выступом груза. В результате, устройство имеет узкие технологические возможности. Целью изобретения является расширение технологических возможностей конвейера. Указанная цель достигается тем, что в устройстве для перемещения грузов, содержащем установленный с возможностью возвратно-поступательного перемещения толкатель с двумя шарнирно закрепленными на нем разнонаправленными упорами одностороннего действия и механизм установки упоров с рычагом переключения упоров, устаноиленным на -толкателе, ограничителями поворота рлчага и шарнирно связанными с неподвижным основанием и между собой приводом и переключателем Еичага, переключатель рычага выполнен в виде пластины с разновысокими кулачками, которая установл на на .основании посредстве паралг лельных рычагов, при этом упоры закреплены на толкателе посредством параллельных осей, а рычаг переключения выполнен трехплечим и два плеча рычага расположены с возможностью взаимодействия.с воответствующим упором/ а третье плечо ; с кулачками пластины. . Кроме того, каждое плечо трехплеч.его рычага на конце имеет ролик. При этом каждый из упоров выполнен с выступом. На фиг. 1 схематически изображено предлагаемое устройстро (перемещение груза вправо на два шага); на фиг. 2 - узел толкателя с механизмом установки упоров; на фиг, 3 разрез А-А на фиг. 2; на фиг. 4 схема работы толкателя при движении груза вправо;на фиг. 5 - то же, при движении груза влево. Устройство содержит неподвижное основание 1 с установленными на нем с возможностью возвратно-поступательного перемещения в направляющих 2 толкателями 3,4. Толкатели 3 и 4 имеют привод 5 и связаны между собой цепной передачей 6. Каждый толкатель 3,4 выполнен из корпуса 7 с двумя шарнирно закрепленными на посре ством параллельных осей 8 разнонаправленными упорами одностороннего действия - левым упором 9 и правым упором 10. Каждый упор снабжен выступами 11 и противовесом 12. Механизм установки упоров включа установленный на толкателях 3 и 4 н оси 13 ричаг переключения упоров, выполненный в виде трехплечегр рычага 14 с роликами, расположенными на каждом плече 15, 16 и 17, установленные на корпусе 7 ограничители 18 поворота рычага 14. Креме того, механизм установки упоров содержит шарнирно связанные с неподвижным основа.нием 1 и между собой привод 19 и переключатель 20 рычага 14 , выполненный в виде пластины 21 с разновысокими кулачками высоким 22 и низким 23. Пластина 21 закреплена шарнирно на основании 1 на двух параллельных рычагах 24. При этом два плеча 16 и 17 трехплечего рычага 14 распсложены с возможностью взаимодействия с соответствугацим упорои 9 и 10, а третье плечо ,15 - с кулачками 22 и 23 пластины 21. Цепная передача 6 состоит из цеп 25, огибакщей звездочки 26. Перйнещаемый груз снабжен упорам 27-,. установленными с шагом, равным шагу перемещения толкателя минус ра стояние, необходимое для прохода ynopai толкателя под упором груза и занятия им вертикального положения. Работа устройства заключается в следующем. В исходном положении толкатёля 3 и 4 находятся рядом (фиг. 1) . При перемадении груза вправо привод 5 толкателей 3, 4 перемещается толкатель 3 влево (холостой ход) ; толкатель 3, соединенный с нижней ветвью цепи 25, перемещает толкатель 4 соединенный с верхней ветвью цепи 2 вправо. При этом левый упор 9 толка .теля 4 перемещает груз вправо. При обратном ходе привода 5 левый упор 5 толкателя 3 перемещает груз вправо, а соединенный с цепью 25 то катель 4 переминается влево (холос I той ход). Далее цикл повторяется. ;Для перемещения груза влево работае .правый упор 10 толкателей 3,4; в ос тальном работа устройства повторяется. Переброска упоров 9 и ГО осуществляется механизмом установки упоров следующим образом. При перемещении груза вправо (фиг. 4) привод 19 перемещает пластину 21 в крайнее левое положение, при этом низкий кулачок 23 подходит к плечу 15 трехплечего р«чага 14. В начале движения толкателя 4 вправо плечо 15с роликом, упираясь в кулачок 23, поворачивает рычаг 14 вокруг оси 13 до ограничителя 18, при этом ролик плеча 16 сходит с выступа 11 левого упора 9, освобождая его. Упор 9 под действием противовеса 12, поворачивается вокруг оси 8 и занимает вертикальное (рабочее) положение, а ролик плеча 17 надвигается на выступ 11 правого упора 10, заставляя последний, поворачиваясь, занять горизонтальное (не рабочее) положение. Двигаясь дальше, левый упор 9 передвигает груз вправо. При движении толкателя 4 назад (холостой ход) плечо 15проходит над кулачком 23 (трехплечий Е)1чаг 14 остается в покое) . Левый упор 9 , проходя под упором, 27 груза, свободно поворачивается вокруг оси В и возвращается в рабочее положение после прохода упора 27 груза. При перемещении груза влево (фиг.5) привод 19 перемещает пластину 21 в крайнее правое положение. При этом высокий кулачок 22, упираясь в плечо 15 трехплечего рычага 14, поворачивает его вокруг оси 13 до ограничителя 18. Ролик плеча 17 сходит с выступа 11 правого упора 10, освобождая его, а ролик плеча 16нсшвигается на выступ 11 левого упора 9 и заставляет его занять горизонтальное положение. Толкатель 4 двигается вправо (холостой ход) . Ролик плеча 15 проходит над низким кулачком 23, так как пластина 21, двигаясь вправо на параллельных рычагах 24, опускается. Правый упор 10 проходит под упором 27 груза,поворачиваясь вокруг, оси 8, и возврящается в рабочее положение. При движении толкателя назад (рабочий ход) упор 10 перемещает груз влево. Преялага емое устройство обеспечивает перемещение груза в конвейерных линиях с тупиковой схемой расположения постов. Кроме того, оно надежно в работе при реверсивном перемацении одного и того же груза.
27
27
i/z.f
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм для перемещения грузов | 1973 |
|
SU537007A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Толкатель для реверсивного перемещения контейнеров пневмотранспортных систем | 1978 |
|
SU706303A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
