Изобретение относится к приборостроению и станкостроению и может найти применение при управлении положением ротора в активных электромагнитных опорах.
Цель изобретения - упрощение системы и повышение ее надежности.
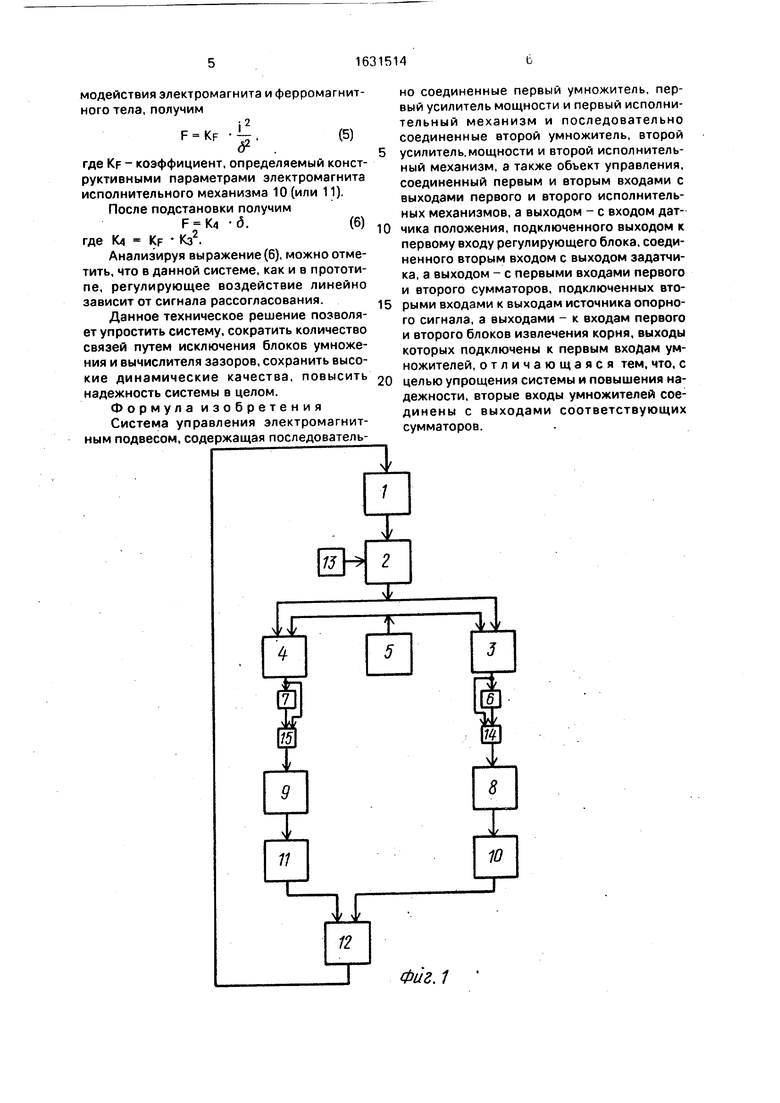
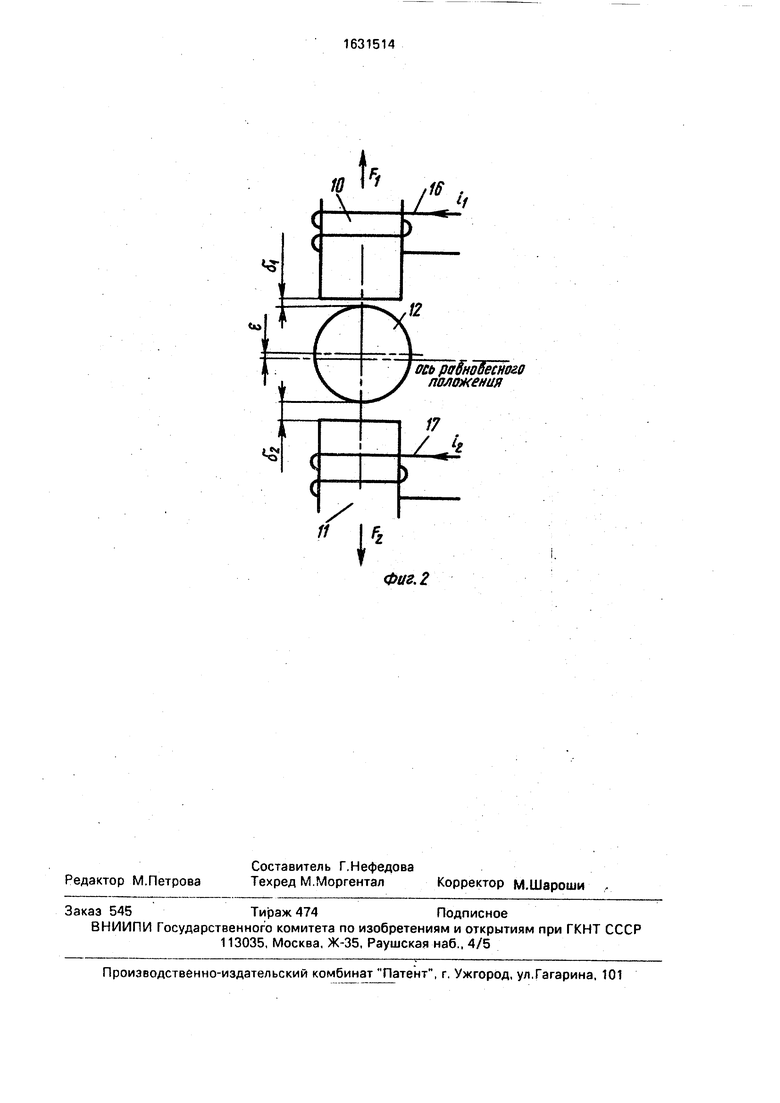
На фиг. 1 представлена блок-схема системы; на фиг. 2- конструктивная схема электромагнитного подвеса,
Система (фиг. 1) содержит датчик 1 положения, регулирующий блок 2, первый и второй сумматоры 3 и 4, источник 5 опорного сигнала, первый и второй умножители 6 и 7, первый и второй усилители 8 и 9 мощности, первый и второй исполнительные механизмы 10 и 1.1, объект 12 управления, задатчик 13, первый и второй блоки М и 15 извлечения корня.
На фиг. 2 обозначено: об.мотки 16, 17 исполнительных механизмов; И, lz токи первого и второго исполнительных механизмов 10 и 11; FL Fa - силы взаимодействия исполнительных механизмов 10 и 11 и объекта 12 управления; - зазоры между исполнительными механизмами 10 и
О W
ел Ј
11 и объектом 12 управления; Д F - результирующая сила; е - смещение объекта 12 управления относительно положения равновесия.
Объектом 12 управления является подвешиваемое тело, а исполнительными механизмами 10 и 11 - электромагниты. В качестве усилителей мощности применяются широтно-импульсные усилители - модуляторы.
Специфика рассматриваемого управления электромагнитным подвесом тела (фиг. 2) состоит в том, что объект 12 управления - подвешиваемое тело - располагается между верхним и нижним (правым и левым) исполнительными механизмами 10 и 11 - электромагнитами, и результирующая сила Л F, определяющая движение (положение) тела, формируется в каждый момент времени как разность A F FT - F2 сил двух электромагнитов, расположенных на одной оси. Каждая из этих сил воздействует на подвешиваемое тело по известному закону:
F KF42/ 52;(1)
(.
где д - зазор между электромагнитом и телом;
е - смещение тела относительно положения равновесия;
д0 - исходный зазор.
Как видно из(1), статическая характеристика связи F f((5) существенно нелинейна, и для улучшения динамических качеств системы подвеса в нее необходимо ввести нелинейную коррекцию.
Из указанной специфики управления подвесом с помощью двух электромагнитов по одной оси вытекает необходимость линеаризации характеристики (1) для каждого электромагнита, поэтому введены отдельные нелинейные корректирующие устройства и исполнительные механизмы. Как видно из изложенного, рассматриваемая система поддерживает подвешиваемое тело в положении е 0 (фиг. 1), т.е. является следящей с нулевым сигналом задания, формируемым на выходе задатчика 13.
Регулирующий блок 2 является звеном последовательной коррекции динамической характеристики системы, в котором реализован, например, ПИД-закон регулирования.
Первый сумматор 3, первый умножитель 6 и первый блок 14 извлечения корня, а также второй сумматор 4, второй умножитель 7 и второй блок 15 извлечения корня совместно с источником 5 опорного сигнала являются звеньями последовательной нелинейной коррекции статической характеристики объекта 12 управления. Корректируемой нелинейной характеристикой объекта 12 управления является указанная зависимость (1) электромагнитной силы AF от зазора между электромагнитом и подвешиваемым телом, характерная для каждой силы FI и F2 (фиг. 2). Выходы исполнительных механизмов 10 и 11 являются этими силами. Сила A F формируется в объекте 12 управления.
Система работает следующим образом.
Задатчик 13 формирует сигнал задания
по положению, например в частном случае.
нулевой. Датчик 1 положения формирует
сигнал, пропорциональный смещению объекта 12 управления от положения равновесия. Выходные сигналы задатчика 13 и датчика 1 положения поступают на входы регулирующего блока 2, в котором они сравниваются, а результат сравнения преобразуется в соответствии с законом регулирования, реализованным в нем.
Выходной сигнал регулирующего блока 2 суммируется в первом сумматоре 3 и вычитается во втором сумматоре 4 со своим знаком из выходного сигнала источника 5 опорного сигнала.
Выходной сигнал источника опорного сигнала устанавливается пропорциональным исходному зазору 60 между исполнительным механизмом 10 (или 11) и положением равновесия (фиг. 2).
На выходах первого и второго сумматоров 3 и 4 формируются сигналы, пропорциопальные истинным зазорам 6i, 62 :
U, Ki д, ,(2)
где 5i (62) - истинные зазоры между объектом 12 управления и исполнительными механизмами 10 (или 11);
Ki - коэффициент, учитывающий статический коэффициент усиления датчика 1 по- ложения, регулирующего блока 2 и сумматора 3 (или сумматора 4).
Далее эти сигналы поступают на входы
умножителей 6 и 7 и с их выходов на входы блоков 14 и 15 извлечения корня, на выходах которых имеем
U2 К2 (53/2.(3)
где К2 Кк53/2.
Следовательно, сигнал тока в обмотках 16 и 17 исполнительных механизмов 10 и 11 имеет вид
| кз -а3/2,(4)
где Кз К2 Ку;
Ку - коэффициент усиления усилителей 8 и 9 мощности.
Подставив значение тока из (4) в известное выражение для вычисления силы взаимодействия электромагнита и ферромагнитного тела,получим
F KF .(5)
где Кр - коэффициент, определяемый конструктивными параметрами электромагнита исполнительного механизма 10 (или 11).
После подстановки получим
F K4 -д.(6)
где К - KF Кз2.
Анализируя выражение (6), можно отметить, что в данной системе, как и в прототипе, регулирующее воздействие линейно зависит от сигнала рассогласования.
Данное техническое решение позволяет упростить систему, сократить количество связей путем исключения блоков умножения и вычислителя зазоров, сохранить высокие динамические качества, повысить надежность системы в целом.
Формула изобретения
Система управления электромагнитным подвесом, содержащая последователь0
5
0
но соединенные первый умножитель, первый усилитель мощности и первый исполнительный механизм и последовательно соединенные второй умножитель, второй усилитель.мощности и второй исполнительный механизм, а также объект управления, соединенный первым и вторым входами с выходами первого и второго исполнительных механизмов, а выходом - с входом датчика положения, подключенного выходом к первому входу регулирующего блока, соединенного вторым входом с выходом за датчика, а выходом - с первыми входами первого и второго сумматоров, подключенных вторыми входами к выходам источника опорного сигнала, а выходами - к входам первого и второго блоков извлечения корня, выходы которых подключены к первым входам умножителей, отличающаяся тем, что, с целью упрощения системы и повышения надежности, вторые входы умножителей соединены с выходами соответствующих сумматоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления пространственным положением быстровращающегося ротора | 1990 |
|
SU1739100A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1582178A1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Нелинейный корректирующий фильтр | 1985 |
|
SU1497607A1 |
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| Устройство для управления приводом передвижения крановой тележки с гибкой подвеской груза | 1991 |
|
SU1799844A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1990 |
|
SU1816185A1 |
Изобретение относится к приборостроению и станкостроению и может найти применение при управлении положением ротора в активных электромагнитных опорах. Цель изобретения - упрощение системы при сохранении ее высоких динамических качеств и повышение ее надежности. Система содержит датчик и за- датчик положения, регулирующий блок с ПИД-законом регулирования и два канала линеаризации, каждый из которых содержит сумматор, первые входы сумматоров соединены с выходом регулирующего блока, а вторые - с выходами источника опорного сигнала. При этом сумматор в каждом канале последовательно соединен с блоком воз- ведения в третью степень, блоком извлечения корня, широтно-импульсным усилителем мощности и исполнительным механизмом (электромагнитом), который воздействует на объект управления. Положение объекта определяется датчиком. Датчик вырабатывает сигнал, пропорциональный смещению объекта от положения равновесия, который через регулирующий блок, каналы линеаризации воздействует на объект и возвращает его в исходное состояние, Источник опорного сигнала задает значение исходного зазора между объектом и исполнительными механизмами. 2 ил.
77
1
Фиг. 1
J4
ось ра нобесного
Фаг. 2
| Электромагнитная опора | 1984 |
|
SU1180573A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Осокоин Ю.А | |||
| и др | |||
| Теория и применение электромагнитных подвесов | |||
| М.: Машиностроение, 1980, с | |||
| Способ изготовления гибких труб для проведения жидкостей (пожарных рукавов и т.п.) | 1921 |
|
SU268A1 |
| Заявка ФРГ №3208133, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
