Изобретение относится к океано графическим измерениям и может быть использовано для определения по ходу судна скорости перемещения неодно- родностей параметров гидрофизических полей (температуры, электропровод ности и т.д.).
Целью изобретения является повьг шение точности
Способ основан на том, что изме- ренный в фиксированной точке пространства частотный спектр S (fi)) связан с пространственным спектром
(р(К) соотношением
S(G (K) ;()
W - U-К,(2)
где СО циклическая частота; К - волновое число| U - скорость перемещения неодно- 35
родностей
В случае, если измерения проводятся движущимся со скоростью V измерителем, то кажущаяся частота регистрируемых им неоднородностей40
Q К (U + V).(3)
Если измерения осуществляются двумя датчиками, движущимися со скоростями V, и V2 относительно неподвижной системы координат, то уровни спект ральной плотности флуктуации, изме- . ряемые первым и вторым датчиками на частоте $ , определяются выражениями:
s(20) - (и + v,)-y(Kf),
где К, Q0/U + Vt ;(4)
Sa(Qo) (U + V2)-9(K2), где K2 + V2.(5)
Спектры волновых чиселУСК) на интервале К К . Кг, соответствующем мелкомасштабным фпуктуациям, можно аппроксимировать как
ф(к)
к
(6)
где значения показателя степени п удовлетворяют неравенству 1 п 3; А - размерный множитель Из (4), (5) и (3) следует, что
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель флуктуаций скорости течения | 1984 |
|
SU1216734A1 |
| Устройство для измерения параметров ориентации троса геофизического прибора | 1985 |
|
SU1435940A1 |
| Зондирующий комплекс профиля скоростей течения | 1982 |
|
SU1070484A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| СПОСОБ ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ | 2009 |
|
RU2404081C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВНУТРЕННИХ ВОЛН, ВХОДЯЩИХ В СУММАРНОЕ ВОЛНОВОЕ ПОЛЕ | 2000 |
|
RU2192025C2 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| АКВАЗОНД ЦИКЛИРУЮЩЕГО РЕЖИМА | 2006 |
|
RU2325674C1 |
Изобретение относится к океано- графическим измерениям и может быть использовано для определения по ходу судна скорости перемещения неодно- родностей параметров гидрофизических полей. Целью изобретения является повышение точности. При буксировании плавучих оснований 6 с датчиками 1 и 2 и включении электродвигателя ле- бедки 8 шкив лебедки, вращаясь, перетягивает трос 7 со скоростью Va относительно судна. В результате датчики 1 и 2 перемещаются со скоростями V{ Vc + Va - V0 - Vj, где Vc - скорость судна. В момент, когда
V°° u + M-A-KV A-Q-0n(u + v,)1 ,
-Ч I . ТГ V1-H
П+1
+ V2
4Э
(7) (8)
S2() (О + Уг)-А-Гг откуда получаем
lg S(Q0) - lg 8г(й0) - (n-M)lg(U+V4) - lg(U+V2) .(9)
MIK
.. V, - V,-10f
и . W-ZT ,
где показатель степени Р
ls s«J jjLi-iS- ssM
n + 1
Выражение (10) является основным выражением для расчета скорости U. Все входящие в него величины задают+ v,)1 ,
. ТГ V1-H
П+1
+ V2
(7) (8)
ся или измеряются Значение показателя степени п определяется по виду частотного спектра S,(Q), так как он аппроксимируется выражением, аналогичным (6) 8;(Я) ВО поскольку Q и К связаны между собой линейным соотношением (3).
Буксирование двух датчиков в параллельных плоскостях на одинаковой глубине с различными постоянными скоростями относительно неподвижной
системы координат позволяет вычис- лить скорость перемещения неодно- родностей гидрофизических полей в направлении движения судна по выражению (10).
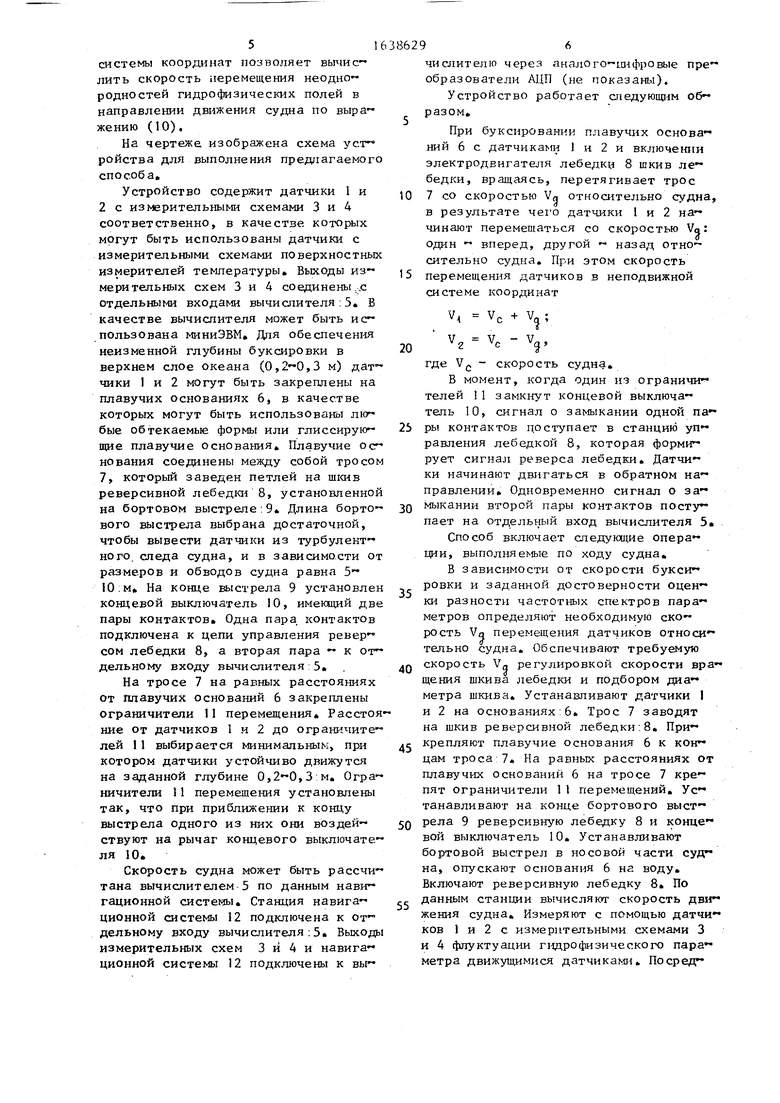
На чертеже изображена схема уст- ройства для выполнения предлагаемого способа.
Устройство содержит датчики I и 2 с измерительными схемами 3 и 4 соответственно, в качестве которых могут быть использованы датчики с измерительными схемами поверхностных измерителей температуры Выходы измерительных схем 3 и 4 соединены с отдельными входами вычислителя 5, В качестве вычислителя может быть использована миниЭВМ Для обеспечения неизменной глубины буксировки в верхнем слое океана (0,2-0,3 м) дат- чики I и 2 могут быть закреплены на плавучих основаниях 6, в качестве которых могут быть использованы любые обтекаемые формы или глиссирующие плавучие основания Плавучие основания соединены между собой тросом 7, который заведен петлей на шкив реверсивной лебедки 8, установленной на бортовом выстреле 9 Длина бортового выстрела выбрана достаточной, чтобы вывести датчики из турбулентного следа судна, и в зависимости от размеров и обводов судна равна 5- 10 м На конце выстрела 9 установлен концевой выключатель 10, имеющий две пары контактов Одна пара контактов подключена к цепи управления реверсом лебедки 8, а вторая пара - к отдельному входу вычислителя 5
На тросе 7 на равных расстояниях от плавучих оснований 6 закреплены ограничители 11 перемещения Расстояние от датчиков 1 и 2 до ограничителей 1 1 выбирается минимальнык, при котором датчики устойчиво движутся на заданной глубине 0,2-0,3 м. Ограничители 11 перемещения установлены так, что при приближении к концу выстрела одного из них они воздействуют на рычаг концевого выключателя 10.
Скорость судна может быть рассчитана вычислителем 5 по данным навигационной системы Станция навигационной системы 12 подключена к отдельному входу вычислителя 5 Выходы измерительных схем 3 и 4 и навигационной системы 12 подключены к вы-
числителю через аналого-цифровые преобразователи АЦП (не показаны).
Устройство работает следующим образом
При буксировании плавучих оснований 6 с датчиками I и 2 и включении электродвигателя лебедки 8 шкив лебедки, вращаясь, перетягивает трос 7 со скоростью Vg относительно судна, в результате чего датчики 1 и 2 начинают перемещаться со скоростью Vn: один - вперед, другой - назад относительно судна. При этом скорость перемещения датчиков в неподвижной системе координат
V Vc
+ V,
v2 vc V,
г
9
5
0
5
0
5
0
5
где vc - скорость судна,
В момент, когда один из ограничителей 11 замкнут концевой выключатель 10, сигнал о замыкании одной пары контактов до ступает в станцию управления лебедкой 8, которая формирует сигнал реверса лебедки Датчики начинают двигаться в обратном направлении Одновременно сигнал о замыкании второй пары контактов поступает на отдельный вход вычислителя 5«
Способ включает следующие операции, выполняемые по ходу судна
В зависимости от скорости буксировки и заданной достоверности оценки разности частотных спектров параметров определяют необходимую скорость Vn перемещения датчиков относи тельно судна. Обспечивают требуемую скорость V регулировкой скорости вращения шкива лебедки и подбором диаметра шкива. Устанавливают датчики 1 и 2 на основаниях 6 Трос 7 заводят на шкив реверсивной лебедки 8 Прикрепляют плавучие основания 6 к концам троса 7 На равных расстояниях от плавучих основании 6 на тросе 7 крепят ограничители 11 перемещений. Устанавливают на конце бортового выстрела 9 реверсивную лебедку 8 и концевой выключатель 10. Устанавливают бортовой выстрел в носовой части судна, опускают основания 6 иг воду. Включают реверсивную лебедку 8 По данным станции вычисляют скорость движения судна. Измеряют с помощью датчиков 1 и 2 с измерительными схемами 3 и 4 флуктуации гидрофизического параметра движущимися датчиками. По сред-
ством вычислителя 5 рассчитывает спектры флуктуации S,(2) и S2(Q) гид рофизического параметра Вычисляют скорость U перемещения неоднородное тей параметра в направлении движения судна по выражению (10), учитывая, что V, Vc + Vg; Vz Vc - V.
Для корректного определения значе ния параметра Р необходимо, чтобы разность уровней спектральных плотностей на частоте QQ превышала их доверительный интервал.
Сравнивая (7) и (8), можно определить, во сколько раз спектральная плотность сигнала одного датчика выше спектральной плотности сигнала другого датчика. Характерные ско- рости перемещения неоднородностей, обусловленных короткопериодными внутренними волнами, лежат в диапа- зоне 0,5 м/с. Поскольку спектры температурных флуктуации имеют на- клоны в пределах от 1 до 3, в примере конкретного выполнения целесообразно принять п .2 При скоростях V и V2, равных соответственно 4 и 2,5 м/с, согласно (10) и(Н) при п 2 оказывается, что S, (Q0)/S2 (Q0) 2,9-3,4. Доверительный интервал 1,5 с 95%-ной обеспеченностью достигается при 50., .т.е. при m 9. Для получения спектральных оценок с указанным доверительным интервалом
8,0в)/8а«у (U + Vc + V0)/(U + Vc - Vg)3.
Для данного числового примера принимаем S, ((Я0)/8г() Зо Соответственно Р согласно (П) равно 0,16. Частота 520 выбирается из условия бли зости к ожидаемой кажущейся частоте внутренних волн при данной скорости движения
Подставляя указанные значения V, V и Р в (10), получаем U 0,89 м/с.
формула изобретения
:1. Способ определения скорости перемещения неоднородностей парзмет- ров гидрофизических полей верхнего слоя океана по ходу судна, заключающийся в том, что буксируемым с постоянной скоростью V, параллельно курсу судна датчиком измеряют частотный спектор флуктуации гидрофизического параметра S((Q), отличающийся тем, что, с целью повышения точности одновременно буксируют
0
5
0
достаточно N 500 при га 25. Продолжительность записи соответственно равна произведению N на дискретность измерений
Пусть внутренняя волна имеет период 5 мин. При движении датчиков навстречу волне ее кажущийся период уменьшается (эффект Доплера) и в данном случае в среднем составит примерно 40 с. Дискретность измерений можно выбрать равной 2 с, тогда продолжительность одного сеанса измерений составит 1000 с.
Если судно движется со скоростью 3,25 м/с (или 6,5 узлов), то задавая скорость вращения шкива лебедки и/или подбирая диаметр шкива, обеспечивают скорость перемещения датчиков относительно судна 0,75 м/с. Это соответствует собственным ско- .ростям движения датчиков в неподвижной системе координат, равным 4 и 2,5 м/с
Обоими датчиками измеряют флуктуации гидрофизического параметра и по этим флуктуациям рассчитываются спектры Если собственные спектры флуктуации измеряемого параметра пропорциональны то отношение спектральных плотностей, рассчитанных по данным измерений первого и второго датчиков на некоторой частоте , равно:
второй датчик, идентичный первому, на той же глубине, параллельно курсу судна с другой постоянной скоростью V2 и измеряют на этой скорости частотный спектр SZ(Q) флуктуации гидрофизического параметра вторым датчиком, а скорость U перемещения неоднородностей определяют из выражения
f i - v - i
и
Vj - V2- 10
где показатель степени
Р
Is.LiiSL:-is..§ii2i
п « 1
п - наклон спектра в окрестности частоты С о.
| Ястребов B.C | |||
| Методы и техни- ческие средства океанологии | |||
| Гидрометеоиздат, 1986,.с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
