Механизмы перемещения блока пуансонов двухударного высадочного автомата, выполненные в виде силового рычажного механизма, состоящего из пяти звеньев и воспринимающего инерционные усилия, известны.
Предлагаемый механизм отличается тем, что перемещение блока пуансонов осуществляется при движении ползуна от плоского кулака, закрепленного на станине, с перекидной стрелкой, управляемой своим приводным механизмом.
Такая конструкция механизма перемещения блока упрощает устройство всего механизма в целом и уменьщает количество силовых деталей.
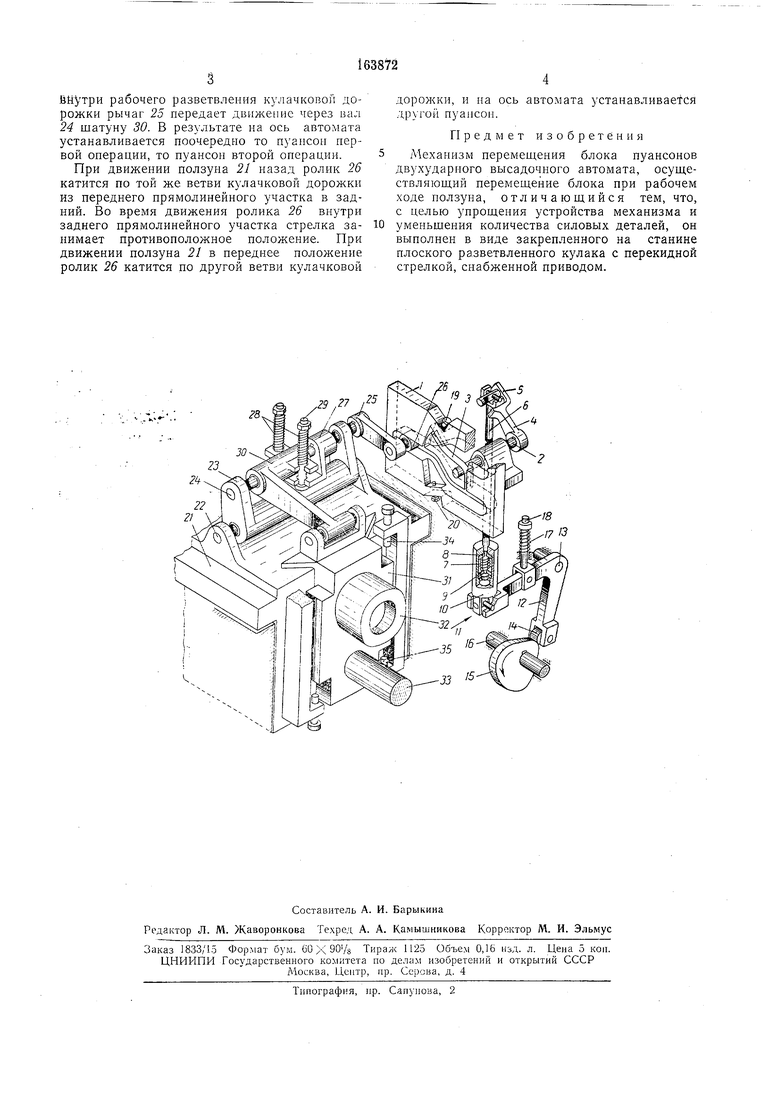
На чертеже изображена кинематическая схема механизма перемещения блока пуансонов двухударного высадочного автомата.
На станине автомата закреплен плоский разветвленный кулак 1, на оси 2 которого насажена перекидная стрелка 3, снабженная приводом (на чертеже не показан). На той же оси установлен рычаг 4, соединенный универсальным шарниром 5 с тягой 6. Тяга через компенсационную пружину 7 и упоры 8 и 5 связана со стаканом 10, который с помощью универсального щарнира 11 соединен с двуплечим рычагом 12, ось 13 которого закреплена в станине автомата. На ролик 14 действует своим профилем кулак 15, установленный на боковом распределительном валу 16. Пружина 17 воздействует на тягу 18, шарнирно связанную с рычагом 12, и прижимает ролик 14 к профилю кулака 15.
При вращении кулака 15 в соответствии с цикловой диаграммой автомата стрелка отклоняется то вверх, то вниз, прижимаясь при помощи компенсационной пружины поочередно то к верхнему упорному болту 19, то
к нижнему упорному болту 20.
На высадочном ползуне 21 автомата на оси 22 установлено коромысло 23, в котором закреплен вал 24. На консоли вала жестко крепится рычаг 25 с роликом 26, который при
движении ползуна катится внутри ветвей дорожки плоского кулака 1. Ступица 27, л естко сидящая на валу 24, с помощью компенсационных пружин 28 и болтов 29 связана с щатуном 30, установленным на валу свободно.
Шатун щарнирно связан с блоком 3/, на котором закреплены пуансоны 32 и 33. При перемещении блока пружины 28 прижимают его к верхним 34 или нижним 35 жестким регулируемым упорам.
Таким образом, при движении ползуна 21 из заднего положения в переднее ролик 26 катится из задней прямолинейной части роликовой дорожки плоского кулака / по верхней или нижней ее ветви в соответствии с
Ёйутри рабочего разветвления кулачковой дорожки рычаг 25 передает движение через ва.ч 24 шатуну 30. В результате на ось автомата устанавливается поочередно то пуансон первой операции, то пуансон второй операции.
При движении ползуна 21 назад ролик 26 катится по той же ветви кулачковой дорожки из переднего прямолинейного участка в задний. Во время движения ролика 26 внутри заднего прямолинейного участка стрелка занимает противоположное положение. При движении ползуна 21 в переднее положение ролик 26 катится по другой ветви кулачковой
дорожки, и на ось автомата устанавливается другой иуаисон.
Предмет изобретения
Механизм перемещения блока пуансонов двухудариого высадочного автомата, осуществляющий перемещение блока при рабочем ходе ползуна, отличающийся тем, что, с целью упрощеиия устройства механизма и уменьшения количества силовых деталей, он выполнен в виде закрепленного на станине плоского разветвленного кулака с перекидной стрелкой, снабженной приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухударный однопозиционный автомат для холодной высадки деталей стержневого типа | 1982 |
|
SU1084102A1 |
| Гвоздильный автомат | 1981 |
|
SU988432A1 |
| ЗОЮЗНАЯ \Ь;;,П:НТй^-|?ШМ?04(Ц 1^нЬЛуТЕНД- j | 1972 |
|
SU331839A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Привод качания пуансонной головки | 1980 |
|
SU935199A1 |
| ДВУХУДАРНЫЙ ХОЛОДНОВЫСАДОЧНЫЯ АВТОЛУАТ | 1973 |
|
SU365876A1 |
| АВТОМАТ ДЛЯ ВЫСАДКИ ГВОЗДЕЙ | 1973 |
|
SU366659A1 |
| Холодновысадочный автомат | 1980 |
|
SU860934A1 |
| ХОЛОДНОВЫСЛДОЧНЫЙ ДВУХУДАРНЫЙ АВТОМАТ | 1972 |
|
SU352702A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
гз
23
2
13
