1,
Изобретение относится к кузнечно-прессовому оборудованию, в частности к оборудованию для изготовления гвоздей.
Известен проволочно гвоздильный авто,мат, состоящий из размещенных на стани не и кинематически связанных между собой механизмов правки, подачи и зажима проволоки, механизма отрезки и заострения, выполнеНногЬ в виде ножей, симметрично расположенных относительно оси высадки, и механизма- высадки головки гвоздя, выполненного в виде ползуна, смонтированного на станине с возможностью качания. Особенностью этого автомата является применение в нем кулисно-эксцентрикового привода высадочного ползуна, позволяющего сократить ход ползуна на 60% 1.
Однако применение кулисно-эксцентрИкового привода ползуна значительно усложнило егй конструкцию, добавились дополнительные шарнирные соединения и кулисно-рычажные звенья, которые в процессе работы являются интенсивными источниками щума.
На автомате изготавливаются гвозди, на высадку головки которых идет часть заготовки длиной, не превышающей два диаметра проволоки (д;ля сохранения устойчивости . высаживаемой части), т. е. изготавливать гвбзди с увеличенной головкой (на высадку которой «дет заготовка длиной более 2,5 диаметров проволоки) невозможно. Гвоз5 ди с увеличенной головкой изготавливаются за два удара: предварительный набор конуса металла на заготовке и, затем окончательная высадка.
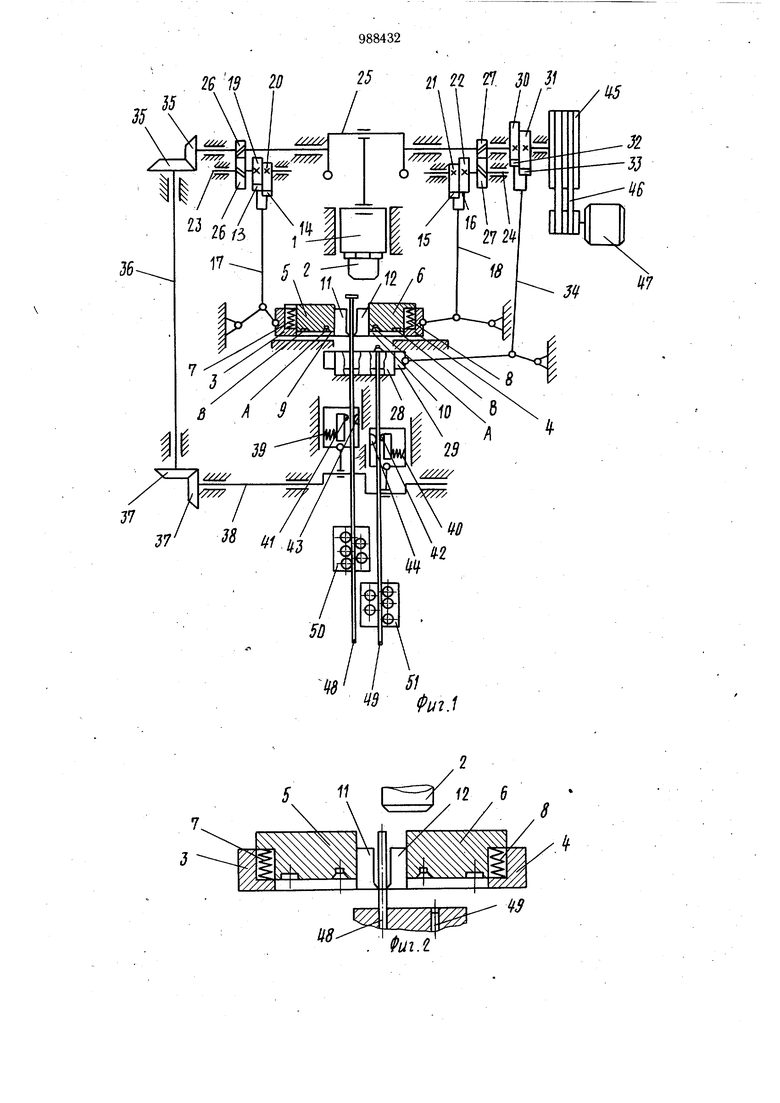
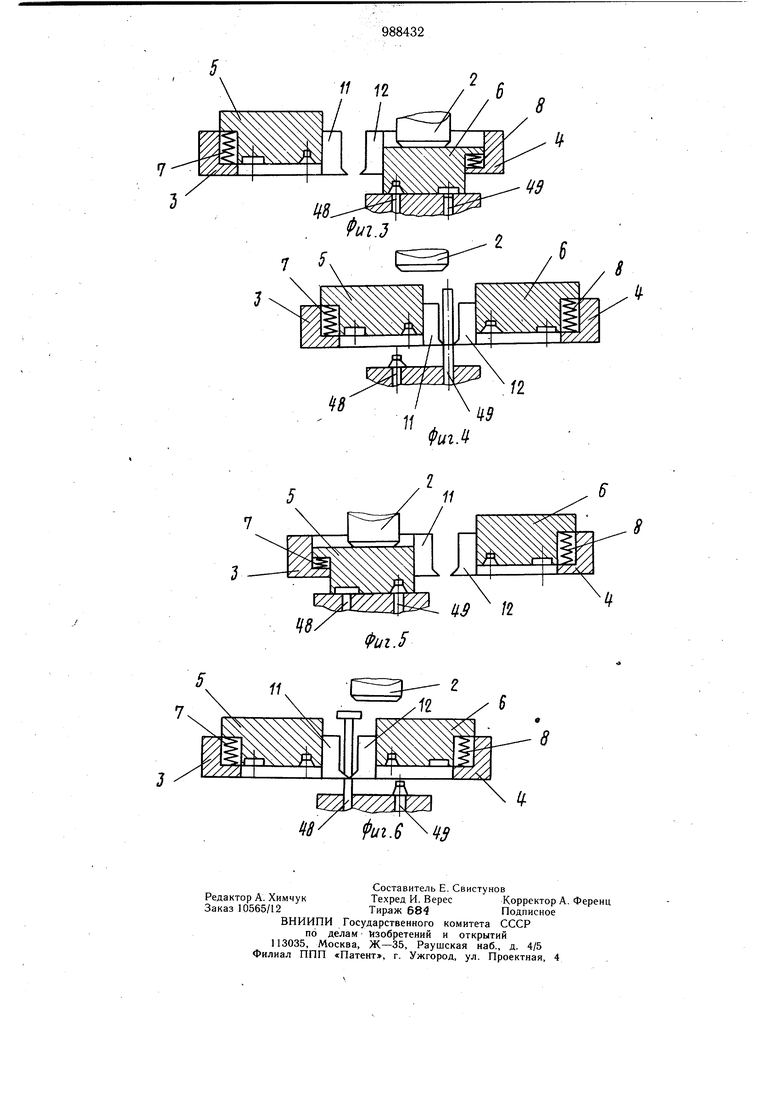
10 Для изготовления гвоздей с увеличенной головкой известен проволочно-гвоздильный двухударный автомат, который осущест-/ вляет высадку головки изделия за два хода ползуна и состоит из приводного посредством коленчатого вала ползуна с пуансо5 ном и кинематически связанных с коленчатым валом кожедержавок с отрезными- ножами, зажимных матриц с рабочим pyчьe я и механизмов правки и подачи. За первый ход ползуна в известном автомате происхо2Q дит предварительная высадка головки гвоздя (набор конической части), за второй ход, после замены предварительного пуансона на окончательный за счет перемещения пуансонной головки, происходит окончательная высадка головки гвоздя. Недостатком этого автомата является низкая производительность, так как за- два хода ползуна получается одно изделие. Кроме того, увеличенный по массе ползун со смонтированной на нем пуансонной головкой и имеющий ход не менее максимальной длины высаживаемого гвоздя, за счет больших динамических нагрузок является интенсивным источником шума во время работы. Цель изобретения - увеличение производительности и снижение уровня шума. Поставленная цель достигается тем, что автомат, содержаший приводгой посредством коленчатого вала ползун с пуансоном, кинематически связанные с коленчатым валом ножедержавки с отрезными ножами, имеет установленный параллельно оси подачи дополнительные механизмы правки и подачи и- кинематически связанный с коленчатым валом дополнительный приводной вал, имеющий развернутые на 180° одна относительно другой шатунные щейки с шатунами, соединенными с каретками подающих механизмов в зажимных матрицах соосно направлению подачи дополнительного подающего механизма, выполнен до полнительный рабочий ручей, а ножедержавки снабжены установленными с возможностью перемещения в направлении, перпендикулярном оси высадки, подпружиненкым:и высадочными блоками с позициями предварительной и окончательной высадки. выполненными на поверхностях выса дочных блоков, обращенных к зажимным матрицам, и отстоящими одна отдругой на .расстоянии, равном расстоянию между рабочими ручьями этих матриц. На фиг. 1 приведена кинематическая схема предлагаемого автомата; на фиг. 2 - положение рабочего инструмента при резе одной из ветвей проволоки; на фиг. 3 - то же, при предварительной высадке одной из ветвей проволоки; на фиг. 4 - то же, при резе второй ветви проволоки; на фиг. 5- то же, при окончательной высадке перЬой проволоки и предварительной высадке второй проволоки; на фиг. 6 - то же, при отрезке готового изделия. Автомат состоит из станины, в которой размещен ползун 1 с пуансоном 2 (фиг. 1), ножедержавок 3 и 4, высадочных блоков 5 и 6. Высадочные блоки 5 и 6 подпружинены пружинами 7 и 8 соответственно и смонтированы в направляющих 9 и 10. Каждый высадочный блок имеет. позиции предварительной А и окончательной В высадки. Ножедержавки 3 и 4 с неподвижно закрепленными ножами 11 и 12 имеют привод посредством роликов 13-16, коленорычажной системы 17 и 18 от прямых и обратных кулаков 19-22, смонтированных на промежуточныхвалах 23 и 24, которые связаны с коленчатым валом 25 зубчатыми парами 26 и 27 с передаточным числом i 2. Кулаки 19-22 выполнены с профилями, обеспечивающими перемещение рабочей кромки ножей 11 и 12 за ось высадки на величину, позволяющую позициям предварительной и окончательной высадки А и В высадочного блока расположиться напротив осей высадки. Перед ножами 11 и 12 расположены неподвижная 28 и подвижная 29 матрицы, имеющая привод от прямого и обратного кулаков 30 и 31, расположенных на коленчатом валу 25, от роликов 32 и 33 и коленорычажной системы 34. Коленчатый вал 25 через коническую пару 35 с передаточным числом i 2, через промежуточный вал 36, посредством конической пары 37 с передаточным число-м i 1 связан с приво-дным валом 38. Подающие устройства выполнены в виде кареток 39 и 40, в которых смонтированы подпружиненные зубильца 41 и 42 и наковаленки 43 и 44 связанных с шатунными шейка.ми развернутыми друг относительно друга на 180°, приводного вала 38 шатунами и движутся так, что когда одна из них находится в крайнем переднем положении, другая - в крайнем заднем. На коленвале 25. смонтирован маховик 45, связанный через клиноремепную передачу 46 с электродвигателем 47. Для правки подаваемой проволоки 48 и 49 установлены правильные устройства 50 и 51 соответственно. Автомат работает следующим образом. Проволока 48 через правильное устройство 50, зубильце 41 и наковаленку 43, зажимные матрицы 28 и 29, отрезные ножи И и 12 подается в рабочую зону высадки. Нить проволоки 49 подается через правильное устройство 51, зубильце 42 и наковаленку 44 в зажимные матрицы 28 и 29. Автомат включается на автоматический режим работы. От электродвигателя , 47, через клиноременную передачу 46 маховик 45, коленвал 25, промежуточные валы 23 и 24 приводится в движение ползун 1, ножедержавки 3 и 4 с ножами И и 12, высадоч. ., ные блоки 5 и 6. Ножедержавка 4 с ножом 12 начинает движение вперед перпендикулярно оси высадки, ножедержавка 3 с ножом 11 движется навстречу ножедержавке 4с ножом 12, что достигается определенными профилями кулаков 21, 22 и 19, 20 соответственно. При смыкании ножей 11 и 12 происходит рез выступающей части проволоки 48 с заострением стержня гвоздя и осуществляется зажим проволоки матрицами 28 и 29 (фиг. 1 и 2). Далее ножедержавка 4 с ножом 12 и высадочный блок 6 продолжают движение в направлении перпендикулярном оси высадки, а ножедержавка 3 с ножом 11 и высадочный блок 5
отходят в крайнее заднее положение. К перешедшим за ось высадки проволоки 48 ножедержавке 4 с ножом 12 и высадочрому блоку 6 подходит ползун 1. Б момент, когда высадочный блок 5 находится в крайнем переднем положении и, позиции предварительной и окончательной высадки находятся на осях высадки проволоки 48 и 49 соответственно, ползун 1 пуансоном 2 давит на подпружиненный высадочный блок 6. Высадочный блок б, перемещаясь поступательно относительно ножедержавки 4, вдоль осей высадки, высаживает предварительную головку изделия проволоки 48 (фиг. 1 и 3). Затем ползун 1 движется назад, высадочный блок 6 пружиной 8 возвращается в исходное положение, ножедержавка 4 с ножом 12 начинает движение назад (к крайнему заднему положению), матрицы 28 и 29 разжимаются. Каретка 39 перемещается в исходное положение, каретка 40. подает проволоку 49 в рабочую зону высадки ножедержавки 3 с ножом 11 и высадочный блок 5 движутся вперед перпендикулярно оси высадки.
При смыкании ножей 11 и 12 происходит рез проволоки 49 с заострением конца изделия и осуществляется зажим проволоки матрицами 28 и 29 (фиг. 1 и 4). Далее ножедержавка 3 с ножом 11 и высадочный блок 5 продолжают движение в направлении, перпендикулярном оси высадки, -а ножедержавка 4 с ножом 12 и высадочный блок 6 отходят в крайнее заднее положение. В момент, когда высадочный блок 5 находится в крайнем переднем положении и позиции предварительной и окончательной высадки находятся на осях высадки проволоки 48 и 49 соответственно, ползун 1 пуансоном 2 давит на подпружиненный высадочный блок 5, перемещаясь поступательно, вдоль осей высадки, высаживает предварительную головку изделия на проволоке 49 и окончательную головку на проволоке 48 (фиг. I и 5). Затем ползун 1 отходит назад, высадочный блок 5 пружиной 7 возвращается в исходное положение, ножедержавка 3 с ножом 11 движется назад, матрицы 28 и 29 разжимаются. Каретка 40 перемещается в исходное положение. Каретка 39 подает проволоку 48 с окончательно высаженной головкой на заданную величину. К проволоке 48 подходят ножи 11 и
12, отрезают с заострением конца гвоздь с высаженной увеличенной головкой (фиг. I и 6), который удаляется в тару. Цикл пов торяется.
Предлагаемый автомат имеет в два раза больщую производительность по сравнению с известными автоматами. Наличие инструментальных высадочны. блоков, размещенных в направляющих ножедержавок позволяет сократить ход высадочного пуансона в. 10-12 раз, что существенно снижает уровень щума машины при работе.
Ориентировочный экономический эффект от внедрения одного автомата в производство составит 15-20 тыс. руб. в год.
15
Формула изобретения
Гвоздильный автомат, содержащий приводной посредством коленчатого вала ползун с пуансоном и кинематически связан0 ные с коленчатым валом ножедержавки с отрезными, ножами, зажимные матрицы с рабочим ручьем и механизмы правки и подачи, отличающийся тем, что, с целью повышения производительности и снижения уровнения шума, рн имеет установленные
5 параллельно оси подачи дополнительные механизмы правки и подачи и кинематически связанный с коленчатым валом дополнительный приводной, вал, имеющий развернутые на 180° одна односительно другой шатунные шейки с шатунами, соединенными с- каретками подающих механизмов, в зажимных матрицах соосно направлению подачи дополнительного подающего механизма выполнен дополнительный рабочий ручей, а ножедержавки снабжены установленными с возмож5 ностью перемещения в направлении, перпендикулярном оси высадки , подпружиненными высадочными блоками с позициями предварительной и окончательной высадки, выполненными на поверхностях высадочных блоков, обращенных к зажимным матрицам,
и отстоящими одна от другой на расстоянии, равном расстоянию между рабочими ручьями этих матриц..
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 5 № 512843, кл. В 21 G.3/12, 1977.
2.Гвоздильный автомат модели А 724, конструкции ВСКБКМ, 1955. 2S 13 20 I 21 гг 27 3 u.1 j/i |f
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Проволочно-гвоздильный автомат | 1977 |
|
SU766716A1 |
| Автомат для изготовления гвоздей | 1980 |
|
SU961831A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| Гвоздильный автомат | 1978 |
|
SU751486A1 |
| ГВОЗДИЛЬНЫЙ АВТОМАТ | 1973 |
|
SU433945A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| ГВОЗДИЛЬНЫЙ АВТОМАТ | 1971 |
|
SU435889A1 |