Изобретение относится к измерительной технике, а именно к средствам измерения вибрационных ускорений различных объектов, и может быть использовано при виброиспытаниях этих объектов.
Цель изобретения - расширение рабочего диапазона частот путем совмещения центра жесткости крепления преобразователя с его центром масс.
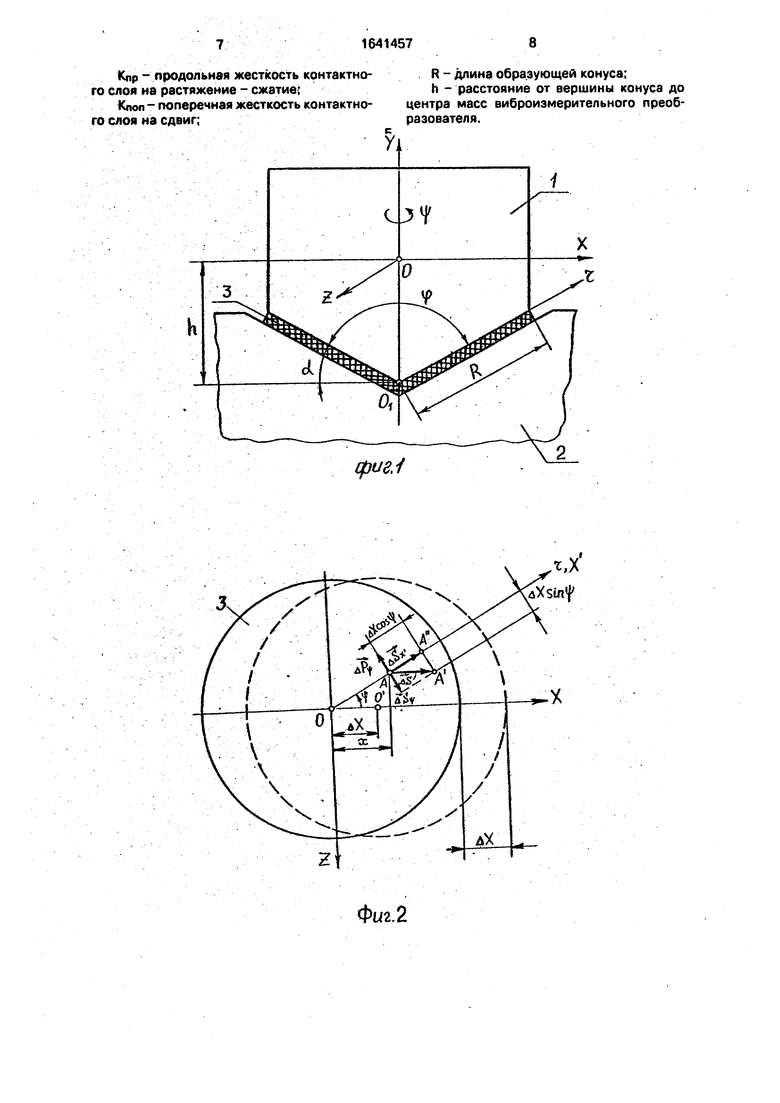
На фиг,1 показана схема преобразователя (ВИП), установленного на объекте; на фиг.2 и 3 - проекции в плоскостях XOZ и YOX1.
Виброизмерительный преобразователь 1. имеющий форму цилиндрического тела с посадочной поверхностью, выполненной в форме прямого конуса, имеет угол конусности р . При креплении ВИП на объекте 2, например с помощью специального клея или мастики 3, коническая поверхность преобразователя стыкуется с конической поверхностью посадочного гнезда, имеющей такой же угол конусности.
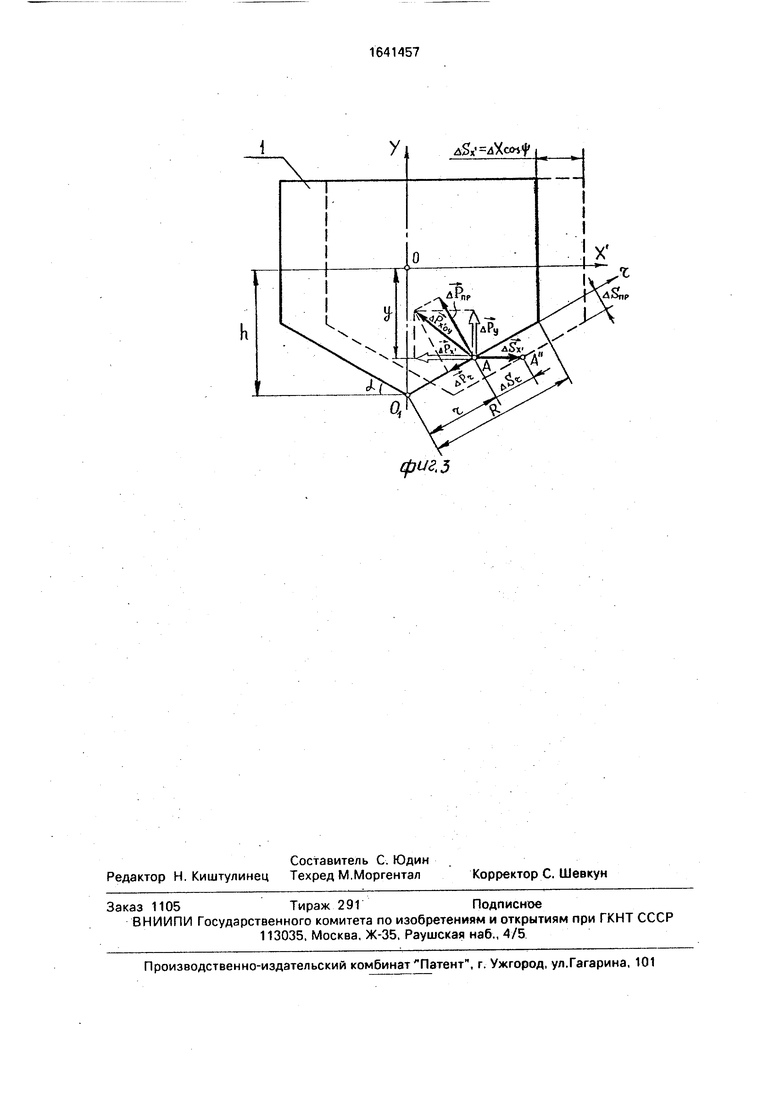
На фиг.2 показаны составляющие вектора перемещения произвольной точки А контактного слоя в проекции на плоскость XOZ; на фиг.З показаны составляющие вектора реакции контактного слоя, действующие в произвольной точке А в проекции на плоскость YOX .
Преобразователь работает следующим образом.
Вибрационные движения объекта 2 через упругий контактный слой 3 передаются виброизмерительному преобразователю 1. При этом суммарные статические моменты реакций контактного слоя при перемещении ВИП в направлении оси Y (фиг. 1) всегда равны нулю в силу осесимметричности ВИП относительно этой оси. Моменты реакций контактного слоя относительно координатных осей при перемещении ВИП в направлении оси X (или Z) равны нулю только в том случае, если равнодействующая реакций контактного слоя при поступательных перемещениях в направлении поперечной оси
ё
О
Ј СП
VJ
проходит через центр масс ВИП - точку О (фиг.1). Достигаемое таким образом совмещение центра жесткости крепления ВИП с его центром масс является причиной двухсвязных колебаний ВИП в поперечных направлениях. Таким образом, удается существенно расширить рабочий диапазон ВИП.
Вводят, наряду с прямоугольной, сферическую систему координат (фиг. 1): радиус г, направленный из точки Oi и совпадающий с образующей контактного конуса; угол долготы , отсчитываемый в плоскости XOZ от оси ОХ против часовой стрелки, и угол широты a- const. Считают, что оси X. Y, 2 совпадают с главными центральными осями инерции ВИП, находящегося в покое, а точка О является его центром масс. Кроме того, считают, что стык контактирующих поверхностей ВИП и объекта моделируется условным упругим контактным слоем, без зазора прилегающим к контактирующим- плоскостям и подчиняющимся закону Гука. Различают продольную КПр и поперечную Кпоп жесткости упругого контактного слоя, приходящиеся на единицу площади контакта. Считают также, что малое перемещение любой точки упругого контактного слоя в продольном направлении, т.е. по нормали к каждой элементарной площадке стыка, не вызывает сдвиговых поперечных реакций, и наоборот, перемещение в поперечном направлении не вызывает реакций растяжения - сжатия в продольном направлении.
Рассмотрим некоторую точку А контактного слоя с координатами . Пусть ВИП получил малое поступательное перемещение АХ в направлении оси X так, что точка А перешла в положение А1 (фиг.2). Тогда вектор Л S перемещения точки А можно представить в виде суммы двух векторов, параллельных плоскости XOZ
ЛЗ Д8х+А5,(1)
где Д3х проекция вектора AS на вспомогательную ось X , лежащую в плоскости XOZ и составляющую с осью X угол гр;
A Sip- касательная составляющая вектора AS.
Длина векторов A Sxi и AS- ASx AXcos, (2)
AS AXsin. (3)
Рассмотрим проекции вектора A Sx в плоскости X OY, где Д Sx можно разложить на составляющие, соответствующие продольному ASnp и поперечному ASr перемещению упругого контактного слоя (фиг.З)
ASnp AX sin a cos V,(4)
A Sr A X cos a cos t/,(5)
Из фиг.2 и 3 видно, что поперечное перемещение точки А складывается из двух взаимно ортогональных составляющих AS и ASr. Тогда поперечное перемеще- ние ASnon рассматриваемой точки контактного слоя
Л$1°п VAS$ + AS
10
АХ vSin2 + cas2acos2
(6)
Рассмотрим теперь реакции, действующие в точке А упругого контактного слоя, соответствующие продольному ASnp и по- поперечномуА Snon перемещениям. С учетом (4) реакция в продольном направлении
АРпр Кпр АХ sinorcos V(7)
реакции, соответствующие составляющим поперечного перемещения АР и Д Рг с
Учетом (3) и (5)
АХ sin V.(8)
A Pr Knon A X cos a cos ip(9)
По методу наклонных опор условием совмещения центра жесткости крепления
ВИП с центром масс является равенство нулю статических моментов реакций контактного слоя относительно координатных осей X, Y, Z Поскольку рассматриваемый ВИП обладает осевой симметрией относительно оси Y, а следовательно, и симметрией относительно плоскости XOY (фиг.2), то суммарные статические моменты реакций упругого контактного слоя относительно осей X и Y равны нулю. Теперь задача
формулируется следующим образом: необходимо найти такое значение угла р , при котором суммарный момент реакций упругого контактного слоя относительно оси Z был бы равен нулю.
На фиг.З показаны проекции реакций Д Рпр и А Рг контактного слоя, соответствующие перемещениям ASnp и A Sr. ция, соответствующая перемещению Д S, имеет направление, перпендикулярное плоскости X OY. Найдем теперь проекции результирующего в плоскости X OY вектора реакций,.
ДРх-ov ДРпР -ЬАРг(10)
на координатные оси Y и X
APV Apnpcosa-APrsina (11)
ДРх - ДРпр sin a - APrCosa (12)
Поскольку вспомогательная ось X не является ортогональной к оси Z, то для вычисления моментов реакций контактного слоя относительно оси Z необходимо перейти от проекций на ось X к проекциям на ось X
ДРх ДРх V (13)
516414576
С учетом (7) и (9), (8) и (12) выражения для2R
составляющих реакции ЛРу и АРх оконча- 3h(2-)
тельно запишутся
Л Рх - Д X (К„р sin2 a + «поп cos2 a) xполучаем квадратное уравнение относи5тельно sin a
2.;. ,,. .,„2,,л( Kip ,1„2 . Кпр
x cos2 V +Кпоп sin2 (Ј2p--1)slnza-rtlfЈ- + l)sina + 2 0
(14) попКпоп(
A PY АХ (Кпр - knon ) sin а cos «cos у 10 Решение уравнения (23) имеет вид
. „(1 sinaiz
Плечо реакции Д Рх относительно оси Z
+ ,) + )
Y -(h-rsina),(16)
+ ,) + )
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ виброиспытаний изделий | 1989 |
|
SU1753321A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2392625C1 |
| Способ измерения ускорений объекта | 1987 |
|
SU1500946A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| Учебная установка по динамике механизмов | 1989 |
|
SU1645984A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК КРУПНОГАБАРИТНЫХ АНТЕНН ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ БЕЗ ИХ НЕПОСРЕДСТВЕННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2541206C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
| СПОСОБ ЮСТИРОВКИ МЛГНИТОЧУВСТВИТЕЛЬНОГО | 1967 |
|
SU205324A1 |
| Способ определения шага винтовых стружечных канавок многолезвийного инструмента | 1986 |
|
SU1335429A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1973 |
|
SU404030A1 |
Изобретение относится к измерительной технике. Цель изобретения - расширение рабочего диапазона частот виброизмерительного преобразователя за счет разделения двухсвязных поперечных колебаний, которое обеспечивается совмещением центра жесткости крепления преобразователя с его центром масс. Преобразователь содержит инерционный, упругий и чувствительные элементы, размещенные в корпусе, имеющем коническую посадочную поверхность. Угол конусности посадочной поверхности определяется по формуле, приведенной в описании изобретения. 3 ил.
15 «йь-о
где h - расстояние между вершиной Oi нуса и центром масс тела - точкой О.
Тогда суммарный момент реакции Д Рх(24)
27TRУчитывая, что формула (24) имеет смысл
М УД ДРх ) ДХ / j (knp sin a + 20только тогда, когда ее правая часть не пре00вышаетединицы, а выражение, стоящее под
Кпоп cos a) cos V + Ипоп sin (h - r sin a)знаком корня, не является отрицательным,
и учитывая также, что р - л - 2 а., получим
2 J , , ДХКПоп Р3лгсозаформулу, по которой определяют угол коxrcos adrdV g 25нусности ВИП
Т hknr. оч( 2arcstn X
x -2sln«(l B-sln2a-fcos2a4-1),
(14 хУ(Й-)(Ј-) Плечо реакций Д PY относительно оси Z --5
302()
X г cos a cos V(18)
(25)
Тогда суммарный момент реакции ДРу,Коэффициенты Кпр и Клоп продольной и
вычисленный по всей площади контакта поперечной жесткости контактного слоя явля- А о - A v ft fv У ются величинами, пропорциональными соотМ Ј( Д PY ) - Д X J J (knp - knon)xветственно модулю упругости Е и модулю
xs.nacos acosWdrd ГуТаТГо ГеГиТ
АХКюп R ясов о: , knp 5 COS2al (ВИП), содержащий упругий, инерционный и
6 попчувствительный элементы, размещенные в
корпусе с конической посадочной поверхно- (19) стью, на которую при установке ВИП на обьСуммарныемоменты реакций М Ј(Д Рх) 45 екте наносится контактный слой, отличаю- и (ДРу) относительно оси Z имеют про- щийс я тем, что с целью увеличения рабочего тивоположные направления, следователь- диапазона частот путем совмещения центра но, должно выполняться равенствожесткости крепления преобразователя с его
центром масс, посадочная поверхность
Му(ДРх) Му(ДРу),(20) 50 к°РпУса выполнена в форме неусеченного
конуса, угол конусности которого опреде/,-, /чтляется по формуле
которое с учетом (17) и (19) запишетсяж к
I.Ф Л - 2arcsin X
Knp t«2 j„2„ 1 1ч/оп
С ,„., vv(S; + 0- S-f --a
+ MS a + 1KrR-sl a)55 Ь + , „.at и
(Я-,)., (2„x fe + )-f (+ )-e(--l)
Кпоп/кпр .
Преобразовывая (21) и вводя обозначе-М поп
ниегде y 2R/3h;
15 «йь-о
Кпоп
Клр - продольная жесткость контактного слоя на растяжение - сжатие;
R - длина образующей конуса;
h - расстойние от вершины конуса до
Клоп поперечная жесткость контактно- центра масс виброизмерительного преоб
го слоя на сдвиг;
разователя.
R - длина образующей конуса;
h - расстойние от вершины конуса до
разователя.
фие.1
ФЫ2.2
ASx dXcoif
фиг.з
| Приборы и системы для измерения вибрации шума и удара/ Справочник под ред | |||
| В.В.Кпю- ева | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
