1
Изобретение относится к измерительной технике и может быть использовано для одновременного измерения ортогональных компонент вектора магнитной индукции в заданном объеме пространства.
Известные устройства характеризуются тем, что каждый преобразователь направленного действия помещают в индивидуальную катушку и располагают ортогонально один другому в магнитном поле. Выходные сигналы первичных преобразователей подаются на усилительно-преобразовательные устройства, с выхода которых токи обратной связи заводятся в соответствующие катушки так, что в каждом первичном преобразователе автоматически компенсируется только продольная составляющая вектора магнитной индукции, совпадающая с направлением магнитной оси преобразователя.
Однако известные устройства характеризуются невысокой точностью, обусловлеиной влиянием ноперечных компонент вектора магнитной индукции.
Для повыщения точности измерения предлагаемое устройство снабжено ортогонально расноложенными катушками, например кольцами Гельмгольца, через которые пропускают токи обратной связи от соответствующих измерительных преобразователей так, что продольные и поперечные .компоненты переменного поля одновременно и автоматически компенсируются во всем объеме, занимаемом первичными преобразователями, а их величина зависит от глубины обратной связи.
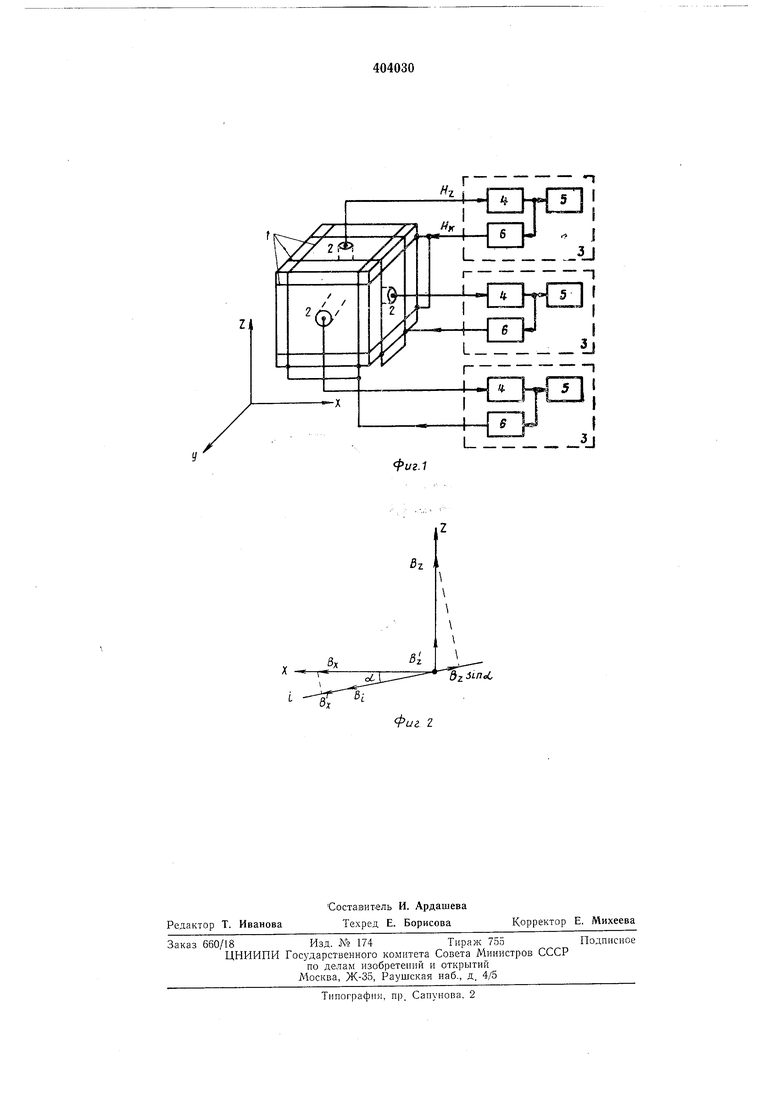
Иа фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 - график оценки индукции, наводимой в первичном преобразователе от поперечной компоненты поля.
Устройство содержит три пары ортогонально расположенных катушек 1, первичные преобразователи 2 и усилительно-преобразовательные устройства 3. Последние состоят из каналов 4 прямого преобразования, регистрирующих
приборов 5 и каналов 6 обратного преобразования.
Устройство работает следующим образом. Три пары ортогонально расположенных катушек 1, в центре которых находятся пе рвичные преобразователи 2, нанравленные вдоль осей катущек, помещают в измеряемое магнитное поле.
Сигналы от первичных преобразователей подают на устройства 3 и через каналы 4 прямого преобразования - на регистрирующие приборы 5, а через каналы 6 обратного преобразователя - в соответствующие пары катушек 1.
Погрешности измерения определяют следующим образом.
Систему координат О, У, Z связывают с осями ортогональных катушек (см. фиг. I), которые не меняют своего пространственного положения.
Относительно этих осей ориентированы магнитные оси первичных преобразователей. Магнитная ось первичного преобразователя изменяется в простраистве из-за непостоянства амплитуды поля возбуждения, тряски, несовершенства технологии изготовления преобразователей и т. д. Считают, что магнитная ось преобразователя изменила свое положение относительно продольной оси катушки на угол а. Пусть угол и компоненты поля BZ и Вх лежат в плоскости XOZ, как показано на фиг. 2. На основании фиг. 2 погрешность от смеш,ения магнитной оси преобразователя определяется следуюш,им образом:
Д5х BX-BI-BZ sin a+Bx(l- cos a), (1)
где BX, BZ - продольная и поперечная компоненты вектора поля.
При этом погрешность от поперечной компоненты поля будет
A x- zsina.(2)
На основании фиг. 1 имеют (равенства
(3)
B, BzK,
где BK - поле компенсации в катушках, создаваемое током обратной связи;
/(, Р - коэффициенты передачи канала црямого и обратного преобразования соответственно.
Из выражений (3) находят значение поперечной компоненты поля, действующей на первичный преобразователь
В
z
(4)
Bz(l- Е),
Bz
l + /Ci
где (:l - -К }-глубина обратной связи. Таким образом, погрешность измерения от действия поперечной компоненты поля будет равна
A5x-5z(l-)sina.(5)
При значении /Ср 100или| 0,99 погрешность измерения будет значительно меньше, чем в известных устройствах.
Предмет изобретения
Устройство для измерения компонент вектора магнитной индукции, содержащее ортогонально расположенные первичные преобразователи направленного действия катушки и
усилительно-преобразовательные устройства, охваченные обратной связью, отличающееся тем, что с целью повышения точности измерения, оно снабжено ортогонально расположенными катуш-ками, например кольцами Гельмгольца, в центре которых расположены преобразователи, а катушки соединены с соответствующими усилительно-преобразовательными устройствами.
И/
Н-,
1 1)
у
L ПГ 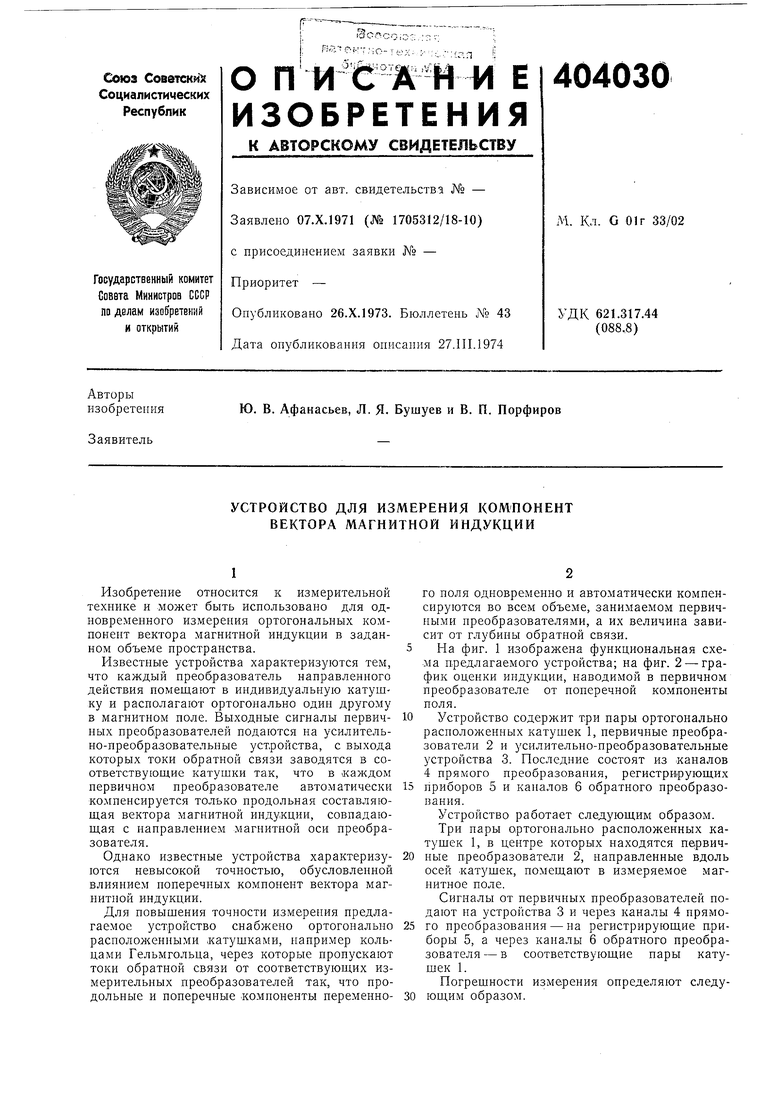
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| Способ определения составляющей вектора магнитной индукции | 1990 |
|
SU1830493A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| Устройство для измерения вектора магнитной индукции | 1977 |
|
SU687424A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| ГРАДИЕНТОМЕТР | 1994 |
|
RU2091806C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |