И пне гп г и мромьпг Н ном граней } и может быть испольлг ,ано для мея /орэционной транспортире ки ipvJOB, upeiivn щесгвенно тары, и, тис расстояния
Цель изобретения - повышение эксплуатационной надежности при одновременном упрощении конструкции.
На фиг 1 изображена предлагаемая тележка, общий вид, на фиг. 2 - то же, вариант исполнения, на фиг. 3 - то же, вид сверху, на фиг. 4 - то же, вид спереди (буксирная рукоятка не показана); на фиг 5 - разрез А-А на фиг. 3.
На платформе 1 тележки с шарнирно закрепленными качающимися вилками 2 установлены катки 3 с возможностью вращения, передняя часть платформы 1 посредством звеньев 4 и 5 связана с поворотной траверсой 6, в которой на подшипниках качения смонтирован кронштейн 7 с возможностью поворота. На кронштейне 7 расположены с возможностью вращения поворотные колеса 8 и жестко закрепленная буксирная рукоятка 9, имеющая возможность поворота в горизонтальной плоскости на оси кронштейна 7 и в вертикальной плоскости на осях 10 и 11, выполненных соосно. В верхнем положении платформа 1 фиксируется подпружиненным фиксатором 12, а ручкой 13, кинематически связанной со звеном 14 и подпружиненным толкателем 15, фиксация снимается Штанги 16 связывают поворотную траверсу 6 с качающимися вилками 2 Платформа 1, штанги 16, вилки 2 и звенья 4 в совокупности представляют собой пантограф. Упор 17, расположенный в передней верхней части платформы, служит для ограничения ввода тележки под тару Ось 11 колес установлена с возможностью качения на оси 18, что обеспечивает копирование колесами неровностей пола Грузовая платформа 1 при необходимости может быть выполнена прямоугольной формы или в виде вил. В качающихся вилках 2 в зависимости от грузоподъемности могут быть установлены спаренные катки 3 (фиг. 2).
, ч грузо о„ъемная тележка рабо- cr- лпим образом
вверх ручки 13 поворачи- 1 с т я , -. о 14, и подпружиненный толка- R 15 нажимает на подпружиненный фик- Сстор 12, при этом снимается фиксация верхнего положения платформы 1 Поворотом вверх буксирной рукоятки 9 опускается платформа 1, тележка подводится под тару до упора 17, затем поворотом на себя буксирной рукоятки 9 платформа 1 поднимается вместе с тарой, при этом в верхнем положении она автоматически фиксируется подпружиненным фиксатором 12. Одновременно траверса 6 приходит в вер- тикальное положение, и колеса 8 приобретают возможность поворачиваться на оси кронштейна 7 посредством буксирной рукоятки 9.
20
Формула изобретения
5
1. Ручная грузоподъемная тележка, содержащая несущую платформу, подъемную посредством шарнирно-рычажного механизма, поворотный вокруг вертикальной оси кронштейн, на котором установлены передвижные колеса тележки, управляемые буксирной рукояткой, фиксатор верхнего положения платформы и механизм снятия фиксации, отличающаяся тем, что, с целью повышения эксплуатационной наQ дежности при одновременном упрощении конструкции, она снабжена поворотной в продольной вертикальной плоскости траверсой, шарнирно связанной с несущей платформой посредством параллельно расположенных друг к другу звеньев и с задними
5 звеньями шарнирно-рычажного механизма посредством продольных штанг, при этом в траверсе с возможностью поворота в горизонтальной плоскости установлен указанный кронштейн, жестко связанный с буксирной рукояткой.
0 2. Тележка по п 1, отличающаяся тем, что фиксатор верхнего положения платформы выполнен подпружиненным и установлен на платформе посредством упора, а механизм снятия фиксации размещен на буксирной рукоятке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Складная хозяйственная тележка | 1988 |
|
SU1717455A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| УСТРОЙСТВО для СМЕНЫ СЛИТКОВОЗА в СИСТЕМЕ КОЛЬЦЕВОЙ СЛИТКОПОДАЧИ | 1969 |
|
SU255894A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2684392C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Тележка для транспортирования штучных грузов | 1980 |
|
SU889511A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |

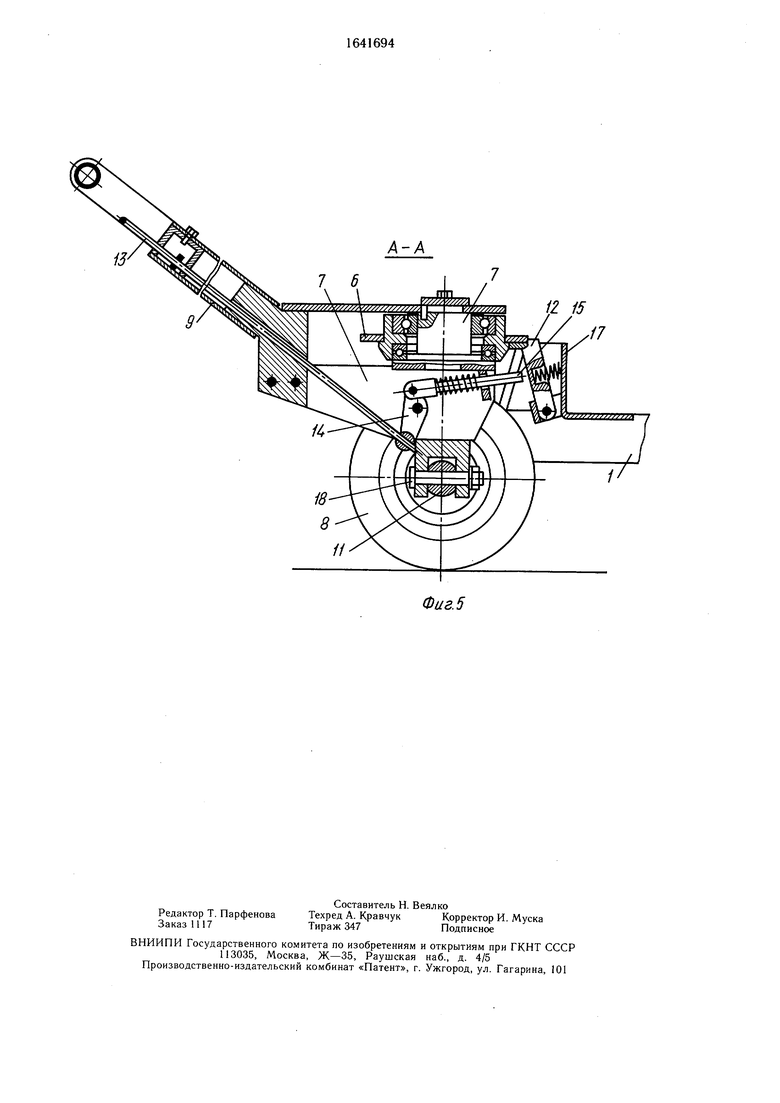
Изобретение относится к промышленному транспорту и может быть использовано для перевозки тары на небольшие расстояния. Цель изобретения - повышение эксплуатационной надежности при одновременном упрощении конструкции. Ручная грузоподъемная тележка содержит платформу 1, кронштейн, на котором установлены поворотные колеса 8, управляемые буксирной рукояткой 9, фиксатор верхнего положения платформы, механизм снятия фиксации, поворотную траверсу 6, ось поворота которой расположена соосно с осью вращения поворотных колес 8, при этом кронштейн последних смонтирован в траверсе 6 на подшипниках качения и жестко связан с буксирной рукояткой 9; кроме того, траверса 6 шарнирно связана с платформой 1 посредством параллельно расположенных друг к другу звеньев 4 и 5, а фиксатор верхнего положения платформы 1 выполнен подпружиненным и установлен на упоре 17 платформы. 1 з.п. ф-лы, 5 ил. Ј (Л о 4 ОЭ СО -U
Фиг. 2
ФигЗ
Фиг 4
А-А
iZ 15
17
Фиг.5
| Патент США № 1844875, кл | |||
| Гонок для ткацкого станка | 1923 |
|
SU254A1 |
