1
(21)4458181/11 (22) 11.07.88 (42)2304.91. Бюл. № 15
(71)Всесоюзный научно-исследовательский институт железнодорожного транспорта
(72)В А. Бондаренко, М А Голубицкий, В А. Вологин и Л. С. Панфиль (53)621.332.38(088.8)
(56) Панфиль Л. С. Усиление контактной сети и ее ремонт механизированными колоннами (Опыт Западно-Сибирской дороги) - В кн.: Усиление устройств тягового электроснабжения Экспресс-информация ЦНИИТЭИ МПС, М., 1974, с. 12-21.
(54) ПЛАТФОРМА ДЛЯ МОНТАЖА ОПОР КОНТАКТНОЙ СЕТИ
(57) Изобретение относится к монтажу опор контактной сети и может быть использовано при сооружении и ремонте контактной сети. Цель изобретения - повышение производительности Платформа содержит раму 1 с ходовой частью и механизм перемещения опор 2, состоящий из перекладчика 3 опор и подвижной балки 4, снабженной приводом 5, неподвижным 6 и подвижным 7 держателями для опор, захватом-манипулятором 8 и рычагом-кантователем 9. 1 ил.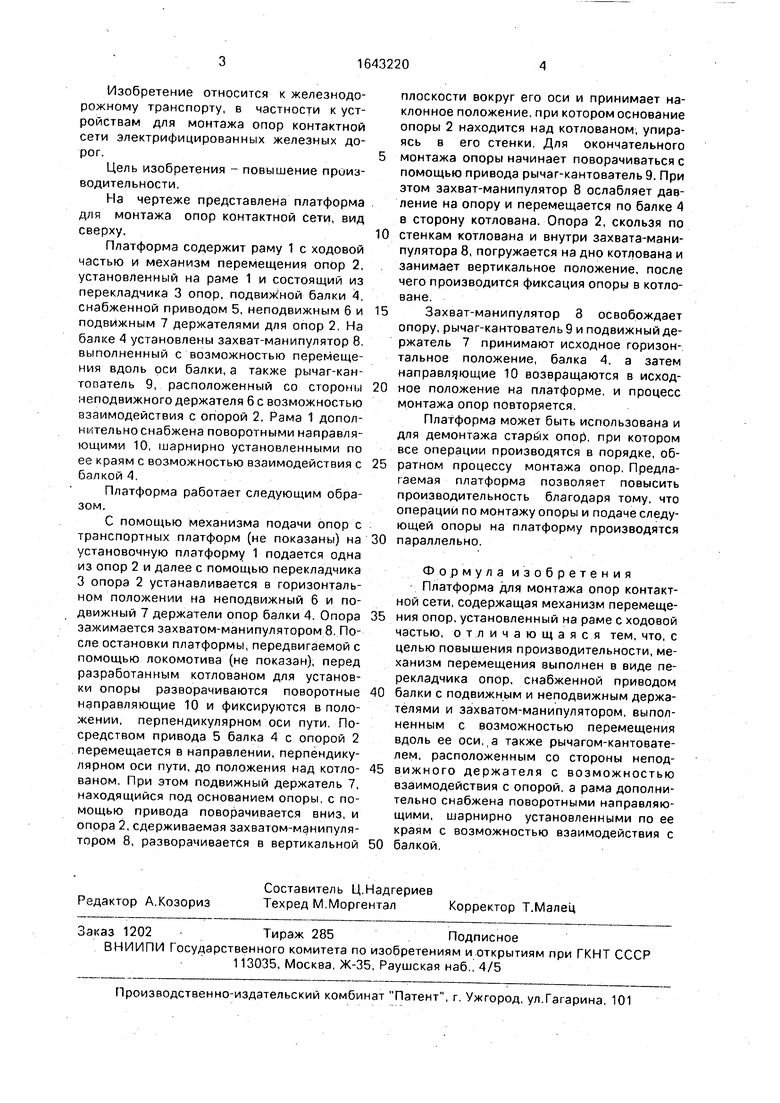
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Подъемно-транспортная машина | 1982 |
|
SU1054291A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЙНО-КОТЛОВАННОЙ МАШИНЫ И ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ РАБОЧЕГО ОБОРУДОВАНИЯ | 2008 |
|
RU2371551C1 |
| МАШИНА ДЛЯ РЕМОНТА КОНТАКТНОЙ СЕТИ | 1998 |
|
RU2144125C1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| СПОСОБ СБОРКИ ЦИЛИНДРИЧЕСКИХ ВСТАВОК КОРПУСОВ КРУПНОТОННАЖНЫХ СУДОВ ИЗ ПОЛУБЛОКОВ И ПОВОРОТНЫЙ КРУГ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2547943C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| ЖЕЛЕЗНОДОРОЖНЫЙ УСТАНОВЩИК ОПОР ДЛЯ КОНТАКТНОЙ ЭЛЕКТРОСЕТИ | 2003 |
|
RU2237611C1 |
| Устройство для непрерывной замены железнодорожного пути | 1977 |
|
SU1012801A3 |
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |

О
± со
Ю
ю о
Изобретение относится к железнодорожному транспорту, в частности к устройствам для монтажа опор контактной сети электрифицированных железных дорог.
Цель изобретения - повышение прииз- водительности.
На чертеже представлена платформа для монтажа опор контактной сети, вид сверху.
Платформа содержит раму 1 с ходовой частью и механизм перемещения опор 2, установленный на раме 1 и состоящий из перекладчика 3 опор, подвиж ной балки 4, снабженной приводом 5, неподвижным 6 и подвижным 7 держателями для опор 2. На балке 4 установлены захват-манипулятор 8, выполненный с возможностью перемещения вдоль оси балки, а также рычаг-кан- тооатель 9, расположенный со стороны неподвижного держателя 6 с возможностью взаимодействия с опорой 2. Рама 1 дополнительно снабжена поворотными направляющими 10, шарнирно установленными по ее краям с возможностью взаимодействия с балкой 4
Платформа работает следующим образом.
С помощью механизма подачи опор с транспортных платформ (не показаны) на установочную платформу 1 подается одна из опор 2 и далее с помощью перекладчика 3 опора 2 устанавливается в горизонтальном положении на неподвижный 6 и подвижный 7 держатели опор балки 4. Опора зажимается захватом-манипулятором 8. После остановки платформы, передвигаемой с помощью локомотива (не показан), перед разработанным котлованом для установки опоры разворачиваются поворотные направляющие 10 и фиксируются в положении, перпендикулярном оси пути. Посредством привода 5 балка 4 с опорой 2 перемещается в направлении, перпендикулярном оси пути, до положения над котлованом. При этом подвижный держатель 7, находящийся под основанием опоры, с помощью привода поворачивается вниз, и опора 2, сдерживаемая захватом-манипулятором 8, разворачивается в вертикальной
плоскости вокруг его оси и принимает наклонное положение, при котором основание опоры 2 находится над котлованом, упираясь в его стенки Для окончательного
монтажа опоры начинает поворачиваться с помощью привода рычаг-кантователь 9. При этом захват-манипулятор 8 ослабляет давление на опору и перемещается по балке 4 в сторону котлована. Опора 2, скользя по
стенкам котлована и внутри захвата-манипулятора 8, погружается на дно котлована и занимает вертикальное положение, после чего производится фиксация опоры в котловане.
Захват-манипулятор 8 освобождает
опору, рычаг-кантователь 9 и подвижный держатель 7 принимают исходное горизонтальное положение, балка 4, а затем направляющие 10 возвращаются в исходное положение на платформе, и процесс монтажа опор повторяется.
Платформа может быть использована и для демонтажа старых onojX при котором все операции производятся в порядке, обратном процессу монтажа опор. Предлагаемая платформа позволяет повысить производительность благодаря тому, что операции по монтажу опоры и подаче следующей опоры на платформу производятся
параллельно.
Формула изобретения Платформа для монтажа опор контактной сети, содержащая механизм перемещения опор, установленный на раме с ходовой частью, отличающаяся тем, что, с целью повышения производительности, механизм перемещения выполнен в виде перекладчика опор, снабженной приводом
балки с подвижным и неподвижным держателями и захватом-манипулятором, выполненным с возможностью перемещения вдоль ее оси,,а также рычагом-кантователем, расположенным со стороны неподвижного держателя с возможностью взаимодействия с опорой, а рама дополнительно снабжена поворотными направляющими, шарнирно установленными по ее краям с возможностью взаимодействия с
балкой.
