Ц
Г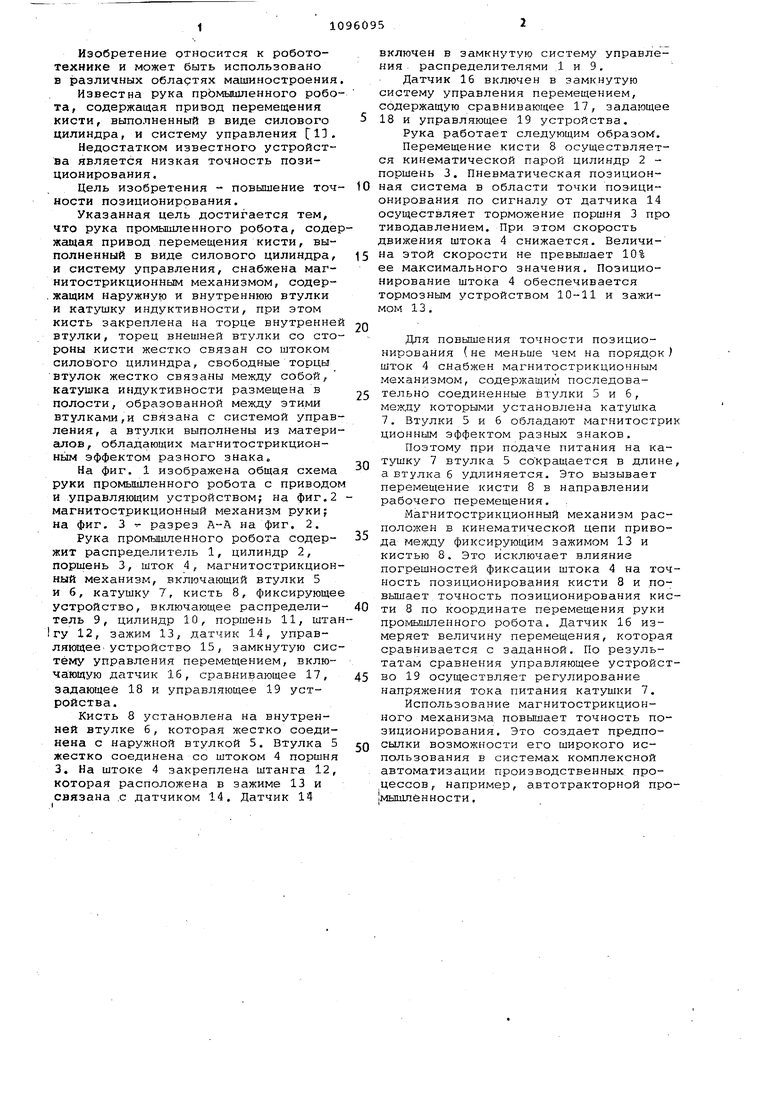
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Схват манипулятора | 1977 |
|
SU633726A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Промышленный робот | 1980 |
|
SU948659A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |

РУКА ПРОМЫ1ШЕННОГО РОБОТА, содержащая привод перемещения кисти, ;выполненный в виде силового цилиндра, и систему управления, о т л и чающая,ся тем, что, с целью повьпяения точности позиционирования. она снабжейа магнитострикционным механизмом, содержащим наружную и внутреннюю втулки и катушку индуктивности, причем кисть закреплена на торцевнутренней втулки, торец внешней втулки со стороны кисти жестко связан со штоком силового цилиндра, свободные торцы втулок жестко связаны межлу собой, катушка индуктивности размещена в полости, образованной между этими втулками, и связана с системой управления, а втулки выполнены из материалов с магнитострикционным эффектом разных знаков.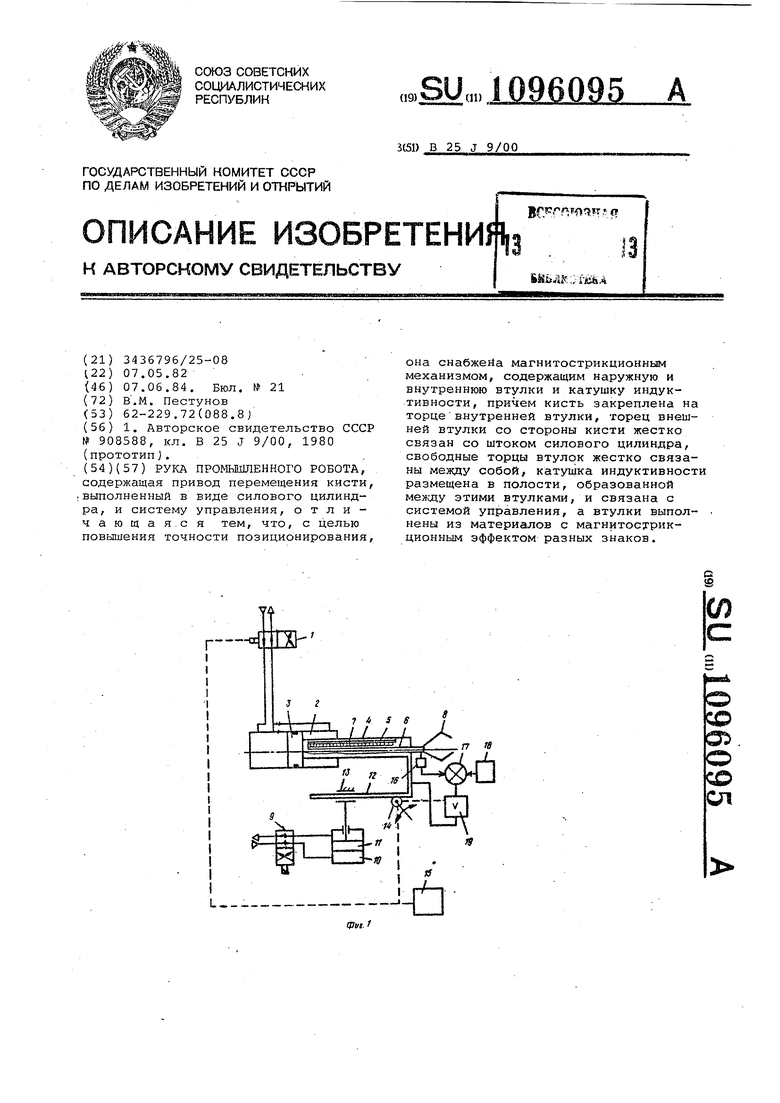
ср
о со
01
Изобретение относится к робототехнике и может быть использовано в различных областях машиностроения
Известна рука прЬмьшшенного робота, содержащая привод перемещения кисти, выполненный в виде силового цилиндра, и систему управления П.
Недостатком известного устройства является низкая точность позиционирования.
Цель изобретения - повышение точности позиционирования.
Указанная цель достигается тем, что рука промышленного робота, содержащая привод перемещения кисти, выполненный в виде силового цилиндра, и систему управления, снабжена магнитострикционным механизмом, содер.жащим Наружную и внутреннюю втулки и катушку индуктивности, при этом кисть закреплена на торце внутренней втулки, торец внешней втулки со стороны кисти жестко связан со штоком силовъго цилиндра, свободные торцы втулок жестко связаны между собой, катушка индуктивности размещена в полости, образованной между этими втулками,и связана с системой управления, а втулки выполнены из материсшов, обладающих магнитострикционным эффектом разного знака
На фиг. 1 изображена общая схема руки промышленного робота с приводом и управляющим устройством; на фиг.2 магнитострикционный механизм руки; на фиг. 3 - разрез А-А на фиг. 2.
Рука промышленного робота содержит распределитель 1, цилиндр 2, поршень 3, шток 4, магнитострикционный механизм, включающий втулки 5 и б, катушку 7, кисть 8, фиксирующее устройство, включающее распределитель 9, цилиндр 10, поршень 11, штан1 ГУ 12, зажим 13, датчик 14, управляющее-устройство 15, замкнутую систему управления перемещением, включа:ющую датчик 16, сравнивающее 17, задающее 18 и управляющее 19 устройства.
Кисть 8 установлена на внутренней втулке 6, которая жестко соединена с наружной втулкой 5. Втулка 5 жестко соединена со штоком 4 поршня 3. На штоке 4 закреплена штанга 12, которая расположена в зажиме 13 и связана .с датчиком 14. Датчик 14
включен в замкнутую систему управления распределителями ,1 и 9,
Датчик 16 включен в замкнутую систему управления перемещением, содержащую сравнивающее 17, задающее 18 и управляющее 19 устройства.
Рука работает следующим образом.
Перемещение кисти В осуществляется кинематической парой цилиндр 2 поршень 3. Пневматическая позиционная система в области точки позиционирования по сигналу от датчика 14 осуществляет торможение поршня 3 про тиводавлением. При этом скорость движения штока 4 снижается. Величи5 на этой скорости не превьплает 10% ее максимального значения. Позиционирование штока 4 обеспечивается тормозным устройством 10-11 и зажимом 13.
Для повышения точности позиционирования (не меньше чем на порядок } шток 4 снабжен магнитострикционным механизмом, содержащим последова5 тельно соединенные втулки 5 и б, между которыми установлена катушка 7. Втулки 5 и 6 обладают магнитострик ционнЕлм эффектом разных знаков.
Поэтому при подаче питания на каQ тушку 7 втулка 5 сокращается в длине, а втулка 6 удлиняется. Это вызывает перемещение кисти 8 в направлении рабочего перемещения, ,
Магнитострикционный механизм расположен в кинематической цепи привода между фиксирующим зажимом 13 и кистью 8. Это исключает влияние погрешностей фиксации штока 4 на точность позиционирования кисти 8 и повышает точность позиционирования кис0 ти 8 по координате перемещения руки про:мьшшенного робота. Датчик 16 измеряет величину перемещения, которая сравнивается с заданной. По результатам сравнения управляющее устройст5 во 19 осуществляет регулирование напряжения тока питания катушки 7, Использование магнитострикционного механизма повышает точность позиционирования. Это создает предпо0 сылки возможности его широкого использования в системах комплексной автоматизации производственных процессов, например, автотракторной промышлённости.
(риг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1980 |
|
SU908588A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
