Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромьшшенного назначенияi
Цель изобретения - повышение точности и надежности устройства.
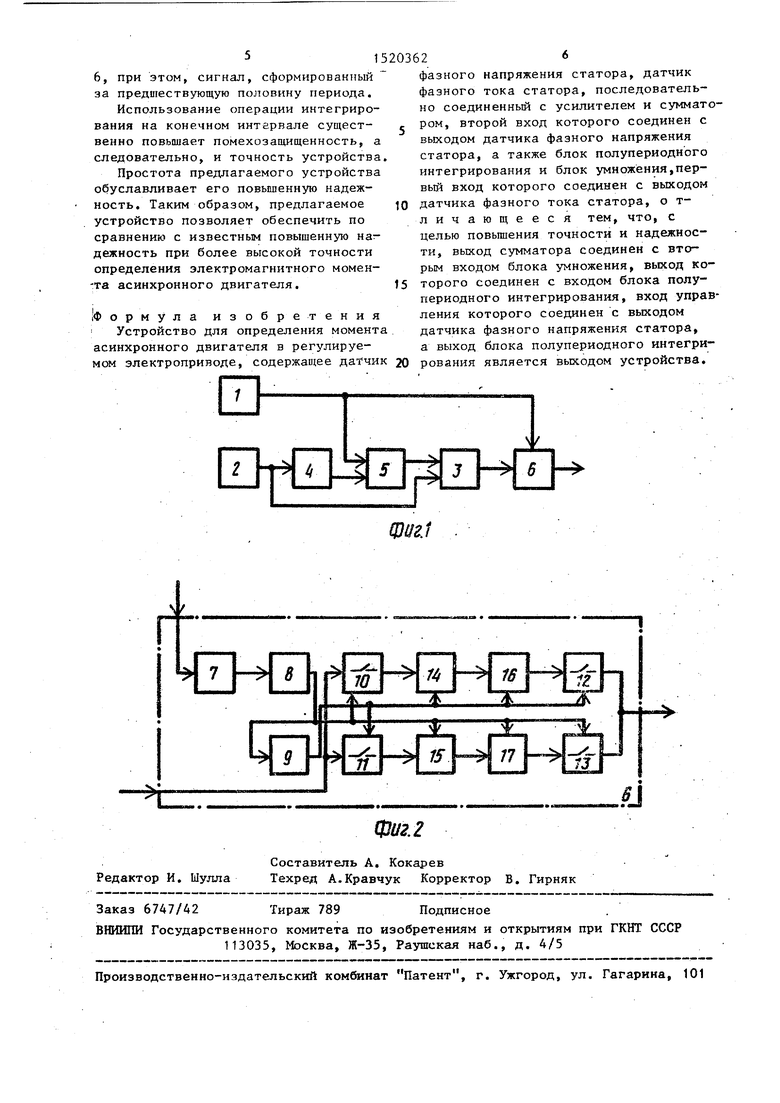
На фиг.1 показана структурнгш схема устройства-, на фиг „2 - структурная схема блока полупериодного интегрирования.
Устройство для определения момента асинхронного двигателя в регулируемом электроприводе (фиг.1) содержит датчик 1 фазного напряжения статора, датчик 2 фазного тока статора, выход которого соединен с первым входом блока 3 умножения и через усилитель 4 с первым входом сумматора 5, выход которого соединен с входом блока 6 полупериодного интегрирования,
кроме того, выход датчика 1 фазного напряжения статора соединен с вторым входом сумматора 5 и входом управления блока 6 полупериодного интегрирования, выход которого является выходом устройства.
Блок 6 полупериодного интегрирования (фиг.2) содержит фильтр 7,компаратор 8, логический элемент НЕ 9, четыре ключа 10-13, два интегратора 14 и 15 и два устройства 16 и 17 выборки и хранения, причем вход управ
|
е
Vct
шш1
ления блока 6 полупериодного интегрирования является входом фильтра 7 низких частот, выход которого через; компаратор 8 соединен с входом логического элемента НЕ 9 и входами управления ключей 10 и 13, интегратора 15 и устройства 17 выборки и хра- нетлкя вход ключа 10 соединен с входом ключа 11 и является входом блока ,6 полупериодного интегрирования, выход ключа 10 соединен через интегратор 14 и устройство 16 выборки хранения с входом ключа 12, выход ключа 1 соединен через интегратор 15 и устройство 17 выборки и хранения с входом ключа 13, выход логического элемента НЕ 9 соединен с входами управления интегратора 14, устройства 16 выборки и хранения, ключа 11 и ключа 12, выход которого соединен с выходом ключа 13 и является выходом блока 6 полупериодного интегрирова- ,ния.
Устройство работает следующим образом.
На первый вход блока 3 умножения подается сигнал, пропорциональный значению мгновенному тока статора, а на второй вход - инвертированный сигнал, пропорциональный мгновен ому значению ЭДС ej E,5,sin (u)t + с/ ) , Причем сигнал на выходе сумматора 5 равен
(-ер + (-R,)- isJ,
где 1 - амплитудное значение фазного тока статораj ср. - начальная фаза фазного
тока статора}
ои - круговая частота напряжения статораJ
Eg - амплитудное значение фазной ЭДС4 ( - начальная фаза фазной
ЭДС)
Ug - мгновенное значение фазного напряжения статора (-RJ) - коэффициент усиления
усилителя 4.
Сигнал и в с выхода блока 3 умножения, равный (.-kf,-1 s is) r As kj, - коэффициент пропорциональности тодается на вход блока 6 полупериодного интегрирования, на вход управления которого подается сигнал фазного напряжения статора, период которого равен Т. При этом на выходе
блока 6 полупериодного интегрирова- ния формируется сигнал UBI,,, равный
т/2
Ue.. -Y- I -
.K
xcos (с,-чр (-|г) sV sin (,) kr,-M,
где Т 21Г/а.,;
Vs KS/U;,) ife v /г i
q - начальная фаза потокосцепления статора cfg - амплитудное значение пото- косцепления статора
Ту - постоянная времени интегрирования j
М - электромагнитный момент асинхронного двигателя; щ коэффициент пропорциональности момента.
Таким образом, выходное напряжение блока 6 полупериодного интегрирования пропорционально электромагнитному моменту асинхронного двигателя.
Блок 6 полупериодного интегрирования работает следующим образом.
Фшльтр 7 низкой частоты вьщеляет основную гармонику сигнала Ug фаз- иого напряжения статора, а компаратор 8 формирует логические сигналы управления с частотой длительностью, равной половине периода (Т/2) напряжения статора.
При этом, когда на выходе компаратора 8 сигнал логической единицы, ключи 10 и 13 открываются, ключи 11 и 12 закрываются, устройство 16 переходит в режим выборки, устройство 17 - в режим хранения, интегратор 14 - в режим интегрирования, а интегратор 15 - в режим обнуления, а когда на выходе компаратора 8 сигнал
логического нуля, ключи 10 и 13 закрываются, ключи 11 и 12 открывдют- ся, устройство 16 переходит в режим хранения, устройство 17 - в режим выборки, интегратор 14 - в режим обнуления , а интегратор 15 - в режим интег- рирования. Таким образом, блок 6
полуперяодного интегрирования осу- ществляет интегрирование с нулевыми начальными условиями и инвертирование входного сигнала, на выходе блока
6, при этом, сигнал, сформированный за предшествующую половину периода.
Использование операции интегрирования на конечном интервале сущест- венно повышает помехозащищенность, а следовательно, и точность устройства.
Простота предлагаемого устройства обуславливает его повышенную надежность. Таким образом, предлагаемое устройство позволяет обеспечить по сравнению с известным повышенную надежность при более высокой точности определения электромагнитного момен- -та асинхронного двигателя.
формула изобретения Устройство для определения момента асинхронного двигателя в регулируемом электроприводе, содержащее датчик
фазного напряжения статора, датчик фазного тока статора, последовательно соединенный с усилителем и сумматором, второй вход которого соединен с выходом датчика фазного напряжения статора, а также блок полупериодного интегрирования и блок умножения,первый вход которого соединен с выходом датчика фазного тока статора, о т- личающееся тем, что, с целью повьшения точности и надежности, выход сумматора соединен с вторым входом блока умножения, выход которого соединен с входом блока полупериодного интегрирования, вход управления которого соединен с выходом датчика фазного напряжения статора, а выход блока полупериодного интегрирования является выходом устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1645856A1 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1631322A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
| Частотно-управляемый асинхронный электропривод | 1985 |
|
SU1257798A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1166257A1 |
Изобретение относится к электротехнике и может быть использовано в регулируемом асинхронном электроприводе общепромышленного назначения. Целью изобретения является повышение точности и надежности устройства. Сигнал, пропорциональный мгновенному значению ЭДС статора, подается на первый вход сумматора, на второй вход которого через усилитель подается сигнал с датчика фазного тока статора. Выходной сигнал сумматора подается на первый вход блока умножения, на второй вход которого подается сигнал с выхода датчика фазного тока статора. Сигнал с выхода блока умножения подается на вход интегрирующего блока. Вход управления блока подаются импульсы, равные половине периода напряжения статора, формируемые компаратором из первой гармоники фазного напряжения статора, поступающего с датчика фазного напряжения, которую выделяет фильтр низких частот. Выходное напряжение блока пропорционально электромагнитному моменту асинхронного двигателя. 2 ил.
Фиг.1
77
| ПатентСЫА № 4442393, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Способ измерения электромагнитного момента многофазного электродвигателя переменного тока | 1977 |
|
SU691703A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
