Изобретение относится к измерительной технике и может быть использовано при испытаниях электрических машин и электроприводов.
Цель изобретения - повышение точности.
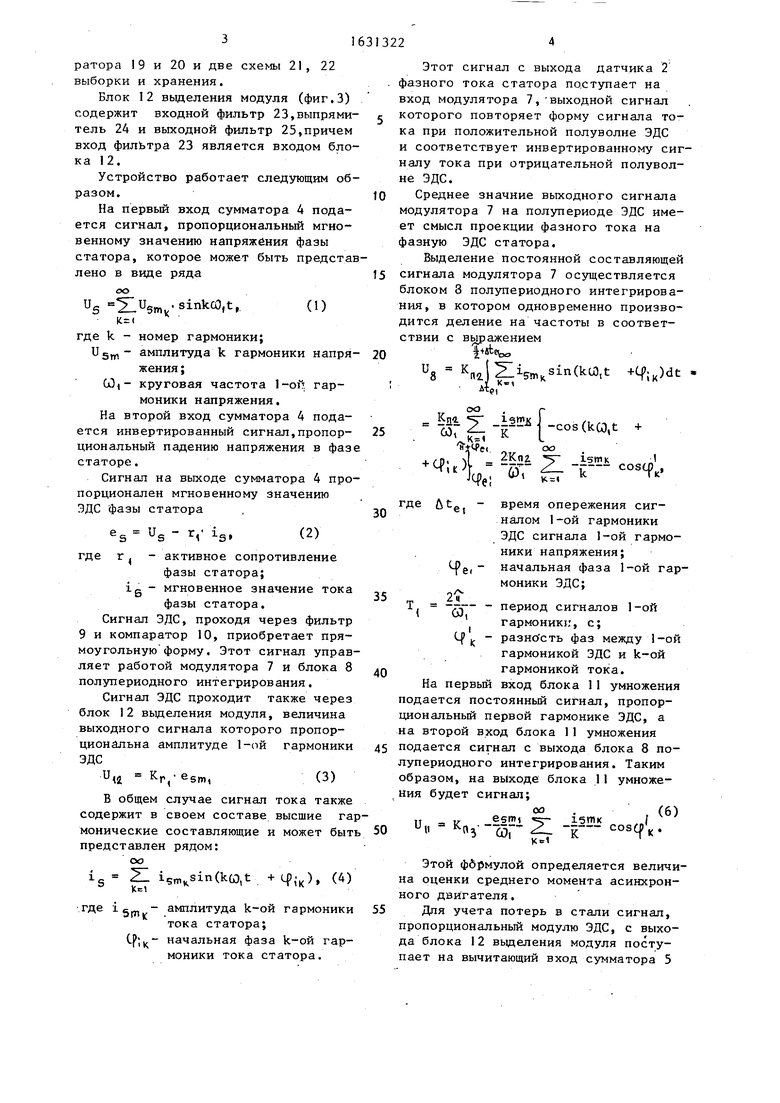
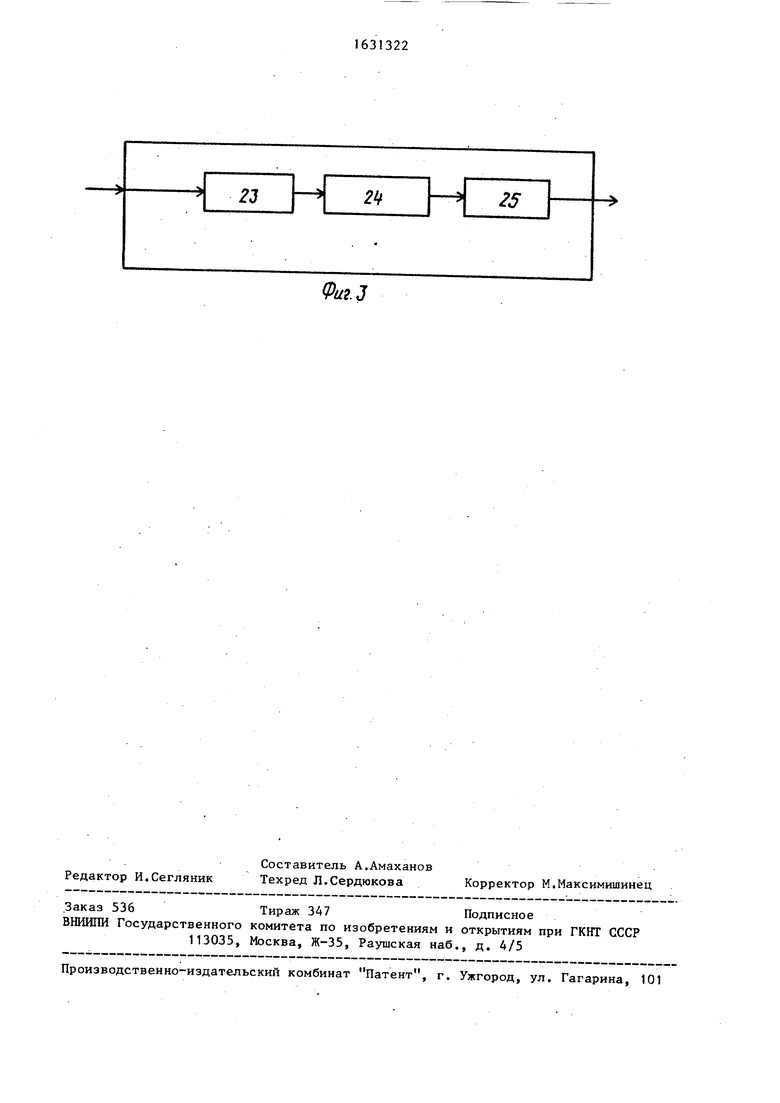
На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - структурная схема блока по- лупериодного интегрирования; на фиг.З - структурная схема блока выделения модуля.
Устройство для измерения электромагнитного момента асинхронного двигателя содержит датчик 1 фазного напряжения статора, датчик 2 фазного
тока статора, усилитель 3, три сумматора 4-6, модулятор 7, блок 8 полупериодного ингерирования, фильтр 9,компаратор 10, блок 11 умножения,блок
12выделения модуля, а также источник
13опорного напряжения.
Блок 8 полупериодного интегрирования (фиг.2) предназначен для . формирования интеграла от входного сигнала на каждом полупериоде ЭДС статора и хранения этого интеграла в течение.следующего полупериода. Блок 8 полупериодного интегрирования содержит логический элемент НЕ 14, четыре ключа 15-18, два интегО5
со
-
со го ю
ратора 19 и 20 и две схемы 21, 22 выборки и хранения.
Блок 12 выделения модуля (фиг.З) содержит входной фильтр 23,выпрямитель 24 и выходной фильтр 25,причем вход фильтра 23 является входом блока 12.
Устройство работает следующим образом.
На первый вход сумматора А подается сигнал, пропорциональный мгновенному значению напряжения фазы статора, которое может быть представлено в виде ряда
US X.u5iV sinkcO.t,
(О
К(
где k - номер гармоники;
U5w- амплитуда k гармоники напряжения ;
круговая частота 1-ой гармоники напряжения. На второй вход сумматора 4 подается инвертированный сигнал,пропорциональный падению напряжения в фазе статоре.
Сигнал на выходе сумматора 4 пропорционален мгновенному значению ЭДС фазы статора
es Us - г,- is,
(2)
где г( - активное сопротивление
фазы статора; 16 - мгновенное значение тока
фазы статора.
Сигнал ЭДС, проходя через фильтр 9 и компаратор 10, приобретает прямоугольную форму. Этот сигнал управляет работой модулятора 7 и блока 8 полупериодного интегрирования.
Сигнал ЭДС проходит также через блок 12 выделения модуля, величина выходного сигнала которого пропорциональна амплитуде 1-ой гармоники ЭДС
К
г, esmt
(3)
В общем случае сигнал тока также содержит в своем составе высшие гармонические составляющие и может быть представлен рядом: оо
isn,Ksin(kGD1t + ), (4)
i cm амплитуда k-ой гармоники
тока статора;
Ср;к начальная фаза k-ой гармоники тока статора.
Этот сигнал с выхода датчика 2 фазного тока статора поступает на вход модулятора 7, выходной сигнал
которого повторяет форму сигнала тока при положительной полуволне ЭДС и соответствует инвертированному сигналу тока при отрицательной полуволне ЭДС.
Среднее значние выходного сигнала модулятора 7 на полупериоде ЭДС имеет смысл проекции фазного тока на фазную ЭДС статора.
Выделение постоянной составляющей
5 сигнала модулятора 7 осуществляется блоком 8 полупериодного интегрирования, в котором одновременно производится деление на частоты в соответствии с выражением
0
l-ubefeo
U
8
К
jZi
i K«t
rt,
5n4sin(ku)tt +tf;K)dt
5
5ul «S- iemjs rkn . K K 1 С08(1с(01
K- frtVeioo
4 --l
J(f( , K,,
ism к
k
СОЗСРк
0
5
0
5
где fit
ej
,0/vТ 2ji
( CO,
ч1.время опережения сигналом 1-ой гармоники ЭДС сигнала 1-ой гармоники напряжения; начальная фаза 1-ой гармоники ЭДС;
период сигналов 1-ой гармоники, с; разно сть фаз между 1-ой гармоникой ЭДС и k-ой гармоникой тока.
На первый вход блока 11 умножения подается постоянный сигнал, пропорциональный первой гармонике ЭДС, а на второй вход блока 11 умножения подается сигнал с выхода блока 8 полупериодного интегрирования. Таким образом, на выходе блока 11 умножения будет сигнал;
, (6)
0
U
И
К
«3
esmi ИГ
к«н
15ГОК
к
cos
т
Этой фбрмулой определяется величина оценки среднего момента асинхронного двигателя.
Для учета потерь в стали сигнал, пропорциональный модулю ЭДС, с выхода блока 12 выделения модуля поступает на вычитающий вход сумматора 5
5 163
и в блоке 3 периодного интегрирования и делится на частоту в соответствии с выражением
- к(ь
EI
оэТ
(7)
Этот сигнал поступает на вход блока 11 умножения, на второй вход которого поступает сигнал, пропорциональный модулю ЭДС. Выходной синал блока 11 умножения, характеризующий долю оценки момента от потерь на вихревые токи, имеет вид
г 552И
и
4
П
COi
(8)
С выхода источника 13 опорного напряжения снимается постоянный сигнал U,а, соответствующий доле оцен ки момента от потерь на гистерезис.
Таким образом, на выходе сумматора 6 действует сигнал, пропорциональный оценке среднего электромагнитного момента с учетом потерь в
стали.
Формула изобретения Устройство для измерения электромагнитного момента асинхронного дви3
1322
гателя, содержащее блок умножения, три сумматора, фильтр, датчик фазного напряжения и датчик фазного тока, подключенные к соответствующим входам первого сумматора, модулятор, соединенный первым входом с датчиком фазного тока, и блок выделения модуля, подключенный к первому входу блоЮ ка умножения, отличающееся тем, что, с целью повышения точности, в него введены источник опорного напряжения, блок полупериодного интегрирования и компаратор, подключенный
15 входом через фильтр к выходу первого сумматора и входу блока выделения модуля, а выходом - к управляющему входу блока полупериодного интегрирования и второму входу модулятора,подключенного выходом к первому входу второго сумматора, второй вход которого подключен к первому входу блока умножения, а выход - через блок полупериодного интегрирования к второму входу блока умножения, выход которого соединен с первым входом третьего сумматора, подключенного вторым входом к источнику опорного напряжения.
20
25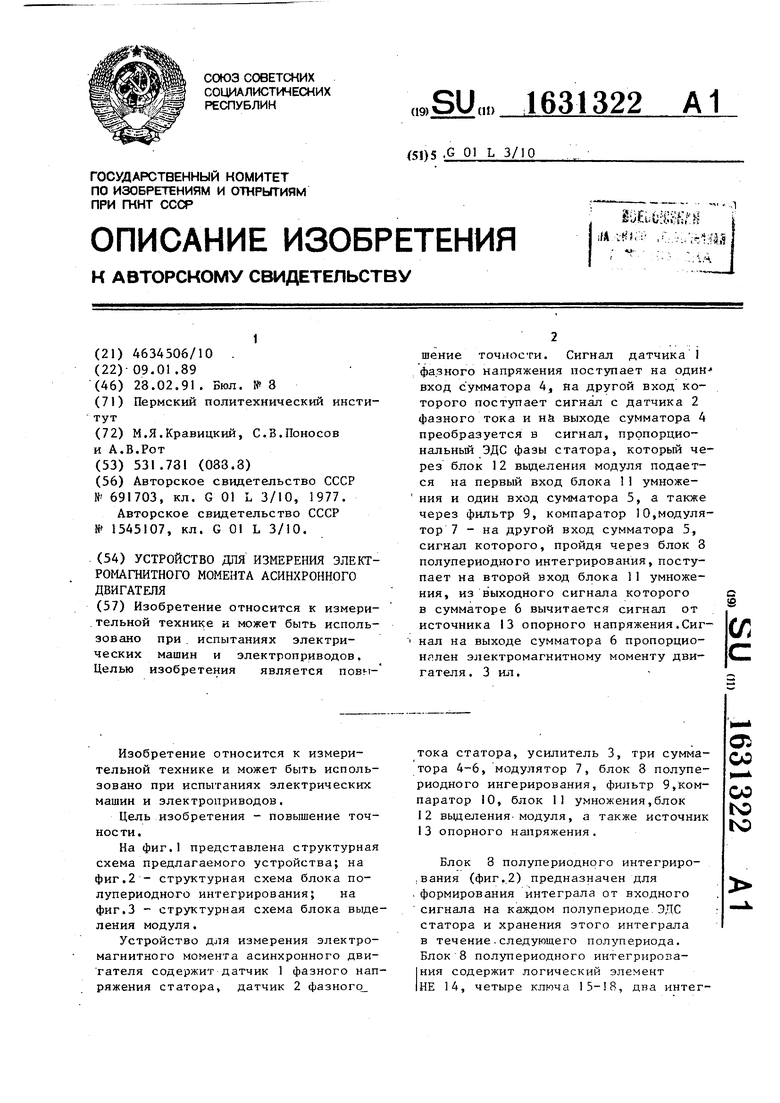

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1645856A1 |
| Устройство для определения момента асинхронного двигателя в регулируемом электроприводе | 1987 |
|
SU1520362A1 |
| Устройство для измерения электромагнитного момента асинхронного электродвигателя | 1987 |
|
SU1545107A1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1983 |
|
SU1137561A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Асинхронный электропривод | 1982 |
|
SU1117813A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
Изобретение относится к измерительной технике и может быть использовано при испытаниях электрических машин и электроприводов. Целью изобретения является повишение точности. Сигнал датчика 1 фазного напряжения поступает на один- вход сумматора 4, на другой вход которого поступает сигнал с датчика 2 фазного тока и на выходе сумматора 4 преобразуется в сигнал, пропорциональный ЭДС фазы статора, который через блок 12 выделения модуля подается на первый вход блока 11 умноже1 ния и один вход сумматора 5, а также через фильтр 9, компаратор 10,модулятор 7 - на другой вход сумматора 5, сигнал которого, пройдя через блок 8 полупериодного интегрирования, поступает на второй вход блока 11 умножения, из выходного сигнала которого в сумматоре 6 вычитается сигнал от источника 13 опорного напряжения.Сиг1 нал на выходе сумматора 6 пропорционален электромагнитному моменту двигателя . 3 ил. о (О (Л с
Риг.2
Фиг.З
24
25
| Способ измерения электромагнитного момента многофазного электродвигателя переменного тока | 1977 |
|
SU691703A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения электромагнитного момента асинхронного электродвигателя | 1987 |
|
SU1545107A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
