1 Изобретение относится к робототехнике и можеТ быть использовано при создании быстродействзпощих приводов роботов.
Цель изобретения - повьшение быстродействия устройства путем автоматической подстройки момента, развиваемого приводом на участках разгона и торможения и обеспечивающего максимально допустимые динамические перегрузки в подвижных частях манипулятора.
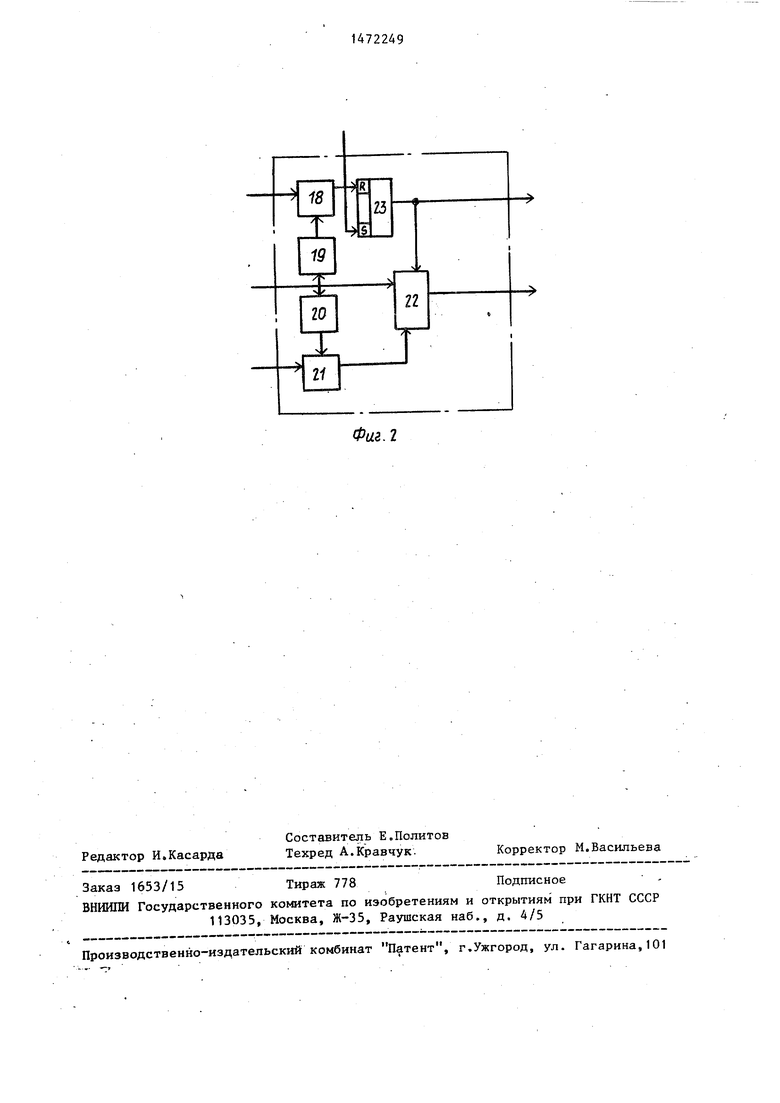
На фиг.1 представлена функциональная схема устройства; на фиг.2 - функциональная схема блока управления.
Устройство содержит блок 1 задания программы, первый сумматор 2, второй сумматор 3, блок 4 управления, формирователь 5 импульса, первьй усилитель 6, привод 7 вращения, первый датчик 8 положения, третий сумматор 9, второй усилитель 10, привод 11 радиального перемещения, второй датчик 12 положения, блок 13 выборки- запоминания, четвертый сумматор 14, блок 15 умножения, блок 16 выделений знака, датчик 17 радиального усилия, компаратор 18, блок 19 выделения модуля, блок 20 сигнала смещения, пятый сумматор 21, коммутатор 22.
Устройство работает следующим образом.
При появлении на первом выходе блока 1 задания программы напряжения и, , соответствующего требуемой координате д манипулятора, на выходе формирователя 5 формируется короткий импульс положительной полярности, устанавливающий на выходе Ю триггера 23 логический сигнал высокого уровня, который переводит блок 13 выборки-запоминания в режим запоминания и подключает сигнал с выхода
этом блок 13 выборки-запоминания пег реводится в режим выборки, и на первый вькод блока 4 управления через с коммутатор 22 проходит сигнал U
). Образуется отрипатель- ная обратная связь в контуре управления, и привод 7 начинает тормозиться по закону Кд„(.) /Крд mpu , с ускорением т- -К п/2Крдтр. Динамические перегрузки при этом Рд„ -Кди/2Крд. При выполнении условия ср C-f j привод 7 вращения останавливается
четвертого сумматора U Knn(cpo-Cf) 15 и стабилизируется в требуемом поло-..It -4 -- ...........- f mr rt f rnT/ f Т Л TTMV
О через пятый сумматор 21 и коммутатор 22 к суммирующему входу второго сумматора 3,
Блок 20 смещения вырабатывает сигнал U sgnCU - ), который суммируется с сигналом 1145;, где величина UQ выбирается, исходя из обеспечения напряжения трогания привода 7 вращения. При этом начинается движение привода 7 вращения в требуемом направлении. Контур, образованньй вторым сумматором 3, на вход которого поступает сигнал U Кд (f + UgSgnCUj - ), первым усилите20
25
30
лем 6, приводом 7 вращения, датчиком 17 радиального усилия и блоком 15, обеспечивает выполнение равенства и,. Прд, где Прд Крдшрсог - сигнал с выхода датчика 17 радиального усилия, -т - суммарная масса подвижных 35 частей привода 7 вращения; р - рас-. стояние от центра масс подвижных частей до оси вращения, со - угловая скорость вращения. Контур по положению является неустойчивым (с положи- 40 тельной обратной связью), и привод 7 разгоняется по закону
Кд„(Ч -Ч о)- -ио § А з-Ч )1 -К..тр(о2- Клп 21. pmwS
возникаюжении. При отработке следующего цикла процесс повторяется. Блок 16, оп ределяющий направление движения, совместно с блоком 15 обеспечивает отрицательную обратную связь по радиальному усилию при любом направле нии перемещения привода 7 вращения.
Таким образом, при выборе коэффи циентов передачи датчиков 8 и 17 по ложения и радиального усилия из соо
5:61 - F
2Крд АПТ устройство обеспечивает движение ма нипулятора на этапах разгона-торможения с максимально возможными диношения
предлагаемое
намическими перегрузками F
45
АП
с ускорением
. „К
Р 2Крдтр
щие при этом динамические перегрузки, Р.„ тре Кдц/2Крд, т.е. определя- 50 ются только отнощением коэффициентов передачи датчиков 8 и 17 положения и
радиального усилия. При выполнении : условия ирд Кд„(ч ,-Ч ). на выходе компаратора 1:8 появляется логический сигнал высокого уровня, устанавливающий на выходе триггера 23 логический сигнал низкого уровня. При
AtlT
Формула изобретени
1. Устройство для управления про мьшшенным роботом, содержащее после довательно соединенные блок задания программы,первьй сумматор, блок управления, второй сумматор, первый усилитель и привод вращения, связанный с первым датчиком положения, выход которого подключен к второму входу первого сумматора, соединенного первым входом с входом формиро вателя импульса, а второй выход бло ка задания программы подключен чере последовательно соединенные третий сумматор и второй усилитель к входу привода радиального перемещения, связанному с вторым датчиком положения, выход которого подключен к второму входу третьего сумматора, отличающееся тем, что, с целью повьшения быстродействия, оно содержит блок выборки и запоминания, четвертый сумматор, последов тельно соединенные блок выделения знака и блок умножения, а также свя занный d приводом вращения датчик р
этом блок 13 выборки-запоминания пег реводится в режим выборки, и на первый вькод блока 4 управления через коммутатор 22 проходит сигнал U
). Образуется отрипатель- ная обратная связь в контуре управления, и привод 7 начинает тормозиться по закону Кд„(.) /Крд mpu , с ускорением т- -К п/2Крдтр. Динамические перегрузки при этом Рд„ -Кди/2Крд. При выполнении условия ср C-f j привод 7 вращения останавливается
5 и стабилизируется в требуемом поло.....- f mr rt f rnT/ f Т Л TTMV
0
5
30
35 40
жении. При отработке следующего цикла процесс повторяется. Блок 16, определяющий направление движения, совместно с блоком 15 обеспечивает отрицательную обратную связь по радиальному усилию при любом направлении перемещения привода 7 вращения.
Таким образом, при выборе коэффициентов передачи датчиков 8 и 17 положения и радиального усилия из соот 5:61 - F
2Крд АПТ устройство обеспечивает движение манипулятора на этапах разгона-торможения с максимально возможными диношения
предлагаемое
намическими перегрузками F
AtlT
5 0
5
0
Формула изобретения
1. Устройство для управления про- мьшшенным роботом, содержащее последовательно соединенные блок задания программы,первьй сумматор, блок управления, второй сумматор, первый усилитель и привод вращения, связанный с первым датчиком положения, выход которого подключен к второму входу первого сумматора, соединенного первым входом с входом формирователя импульса, а второй выход блока задания программы подключен через последовательно соединенные третий сумматор и второй усилитель к входу привода радиального перемещения, связанному с вторым датчиком положения, выход которого подключен к второму входу третьего сумматора, отличающееся тем, что, с целью повьшения быстродействия, оно содержит блок выборки и запоминания, четвертый сумматор, последовательно соединенные блок выделения знака и блок умножения, а также связанный d приводом вращения датчик ра

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Устройство для управления промышленным роботом | 1989 |
|
SU1646851A1 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Устройство для управления манипулятором | 1986 |
|
SU1333568A1 |
| Следящая система с переменным моментом инерции | 1986 |
|
SU1322228A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления электроприводом робота | 1990 |
|
SU1839145A2 |
| Устройство для управления электроприводом робота | 1989 |
|
SU1664548A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |

Изобретение относится к области робототехники и может быть использовано в системах управления промышленными роботами. Цель изобретения - повышение быстродействия. Устройство содержит блок задания программ, формирователь импульса, блок управления, четыре сумматора , блок умножения, приводы вращения и радиального перемещения, датчики положения и усилия, два усилителя, а также блоки выделения знака и выборки - запоминания. Контур, образованный вторым сумматором, первым усилителем, приводом вращения, датчиком радиального усилия и блоком умножения, обеспечивает вращательное движение на этапах разгона - торможения с максимально возможными динамическими перегрузками. Путь торможения является только функцией сигнала датчика усилия и допустимых динамических перегрузок. Автоматическая подстройка момента вращения, обеспечивающего максимально возможные динамические перегрузки, позволяет повысить производительность промышленного робота при работе с грузами различной массы и различными радиусами манипулирования. 1 з.п. ф-лы, 2 ил.
Фиг.1
Фа.г
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
