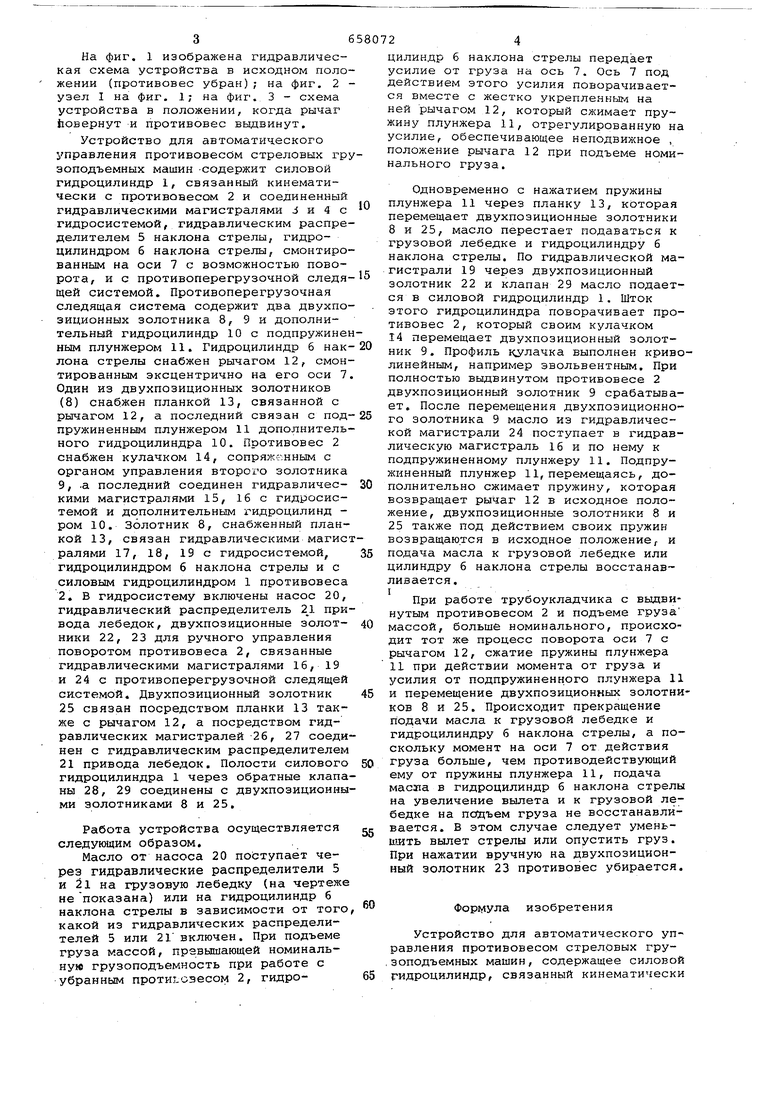
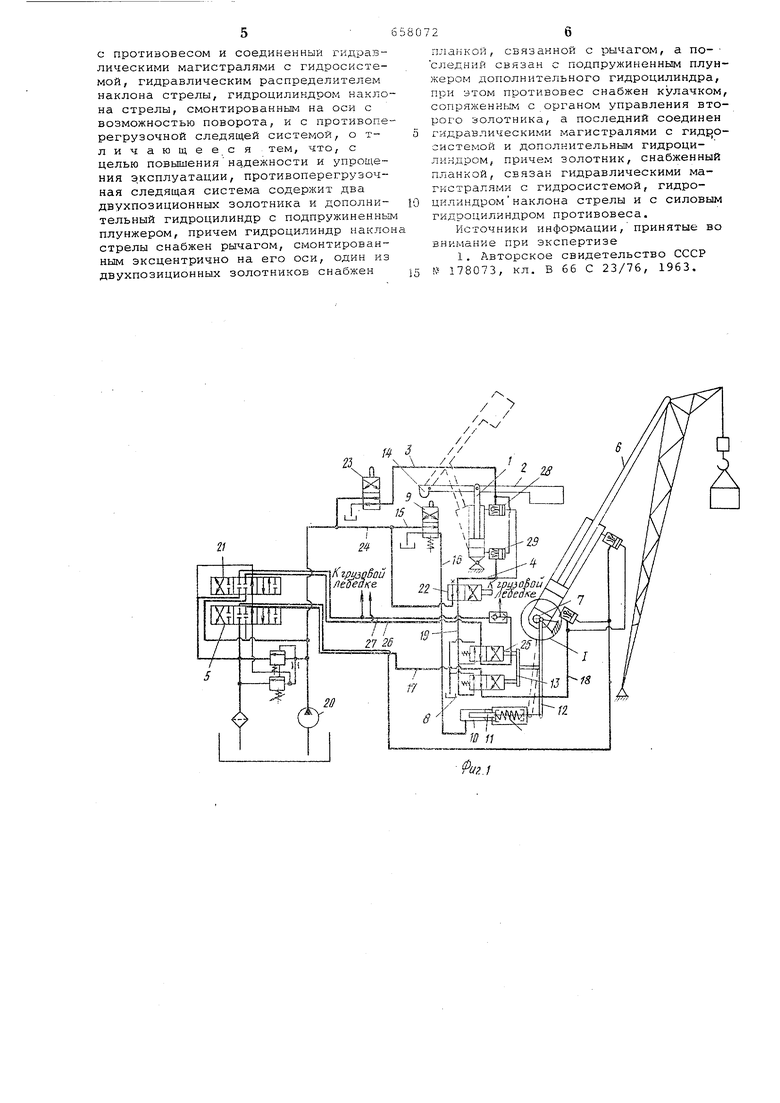
Изобретение относится к области гру 3 оп одъ емн о го оборудов а н и я. Известно устройство для автоматического управления противовесом стре ловых грузоподъемных машин, содержащее силовой гидроцилиндр, связанный кинематически с противовесом и соединенный гидравлическими магистралями с гидросистемой, гидравлическим распределителем наклона стрелы, гидр цилиндром наклона стрелы, смонтированным на оси с возможностью поворота, и с противоперегрузочной следящей системой l . Однако известное устройство недос таточно надежно и сложно в эксплуата ции. Это вызывается тем, подъеме груза, превышающего допустимый предел, возникает опрокидывающий момент, который не может быть уравно вешен противовесом за счет того, что вылет противовеса ограничен длиной направляющей, по он выкаты- вается, и длиной выдвинутого гидроцилиндра, что может привести к опрокидыванию грузоподъемной машины. Кро ме того, гидросмесь, находящаяся в магистралях привода выдвижения проти вовеса, находится в замкнутом конту ре, не связанном с оещим баком, что не позволяет ей перемешиваться и обновляться, и при утечке ее в этой системе будет наблюдаться замедление срабатывания уравновешивающего устройства. Цель изобретения - повышение надежности и упрощение эkcплyaтaции устройства. Это достигается тем, что противоперегрузочная следящая система содержит два двухпозиционных золотника и. дополнительный гидроцилиндр с подпружиненным плунжером, причем гидроцилиндр наклона стрелы снабжен рычагом, смонтированньам эксцентрично на его оси, один из двухпозиционных золотников снабжен,планкой, связанной с рычагом, а последний связан с подпружиненным плунжером дополнительного гидроцилиндра, при этом противовес снабжен кулачком, сопряженным с органом управления второго золотника, апоследний соединен гидравлическими магистралями с гидросистемой и дополнительным гидроцилиндром, причем золотник, снабженный планкой, связан гидравлическими магистралями с гидросистемой, гядроцилиндром наклона стрелы и с силовым гидроцилиндром противовеса. 3 На фиг. 1 изображена гидравлическая схема устройства в исходном положении (противовес убран); на фиг. 2 узел I на фиг, 1; на фиг. 3 - схема устройства в положении, когда рычаг Ьовернут и противовес вьщвинут. Устройство для автоматического управления противовесом стреловых гру зоподъемных машин -содержит силовой гидроцилиндр 1, связанный кинематически с противовесом 2 и соединенный гидравлическими магистралями j и 4 с гидросистемой, гидравлическим распределителем 5 наклона стрелы, гидроцилиндром 6 наклона стрелы, смонтированным на оси 7 с возможностью поворота, и с противоперегрузочной следящей системой. Противоперегрузочная следящая система содержит два двухпозиционных золотника 8, 9 и дополнительный гидроцилиндр 10 с подпружинен ным плунжером 11. Гидроцилиндр 6 наклона стрелы снабжен рычагом 12, смонтированным эксцентрично на его оси 7 Один из двухпозиционных золотников (8) снабжен планкой 13, связанной с рычагом 12, а последний связан с подпружиненным плунжером 11 дополнительного гидроцилиндра 10. Противовес 2 снабжен кулачком 14, сопряженным с органом управления второго золотника 9, .а последний соединен гидравлическими магистралями 15, 16 с гидросистемой и дополнительным гидроцилинд ром 10. Золотник 8, снабженный планкой 13, связан гидравлическими магист ралями 17, 18, 19 с гидросистемой, гидроцилиндром б наклона стрелы и с силовым гидроцилиндром 1 противовеса 2. В гидросистему включены насос 20, гидравлический распределитель 2J. привода лебедок, двухпозиционные золотНИКИ 22, 23 для ручного управления поворотом противовеса 2, связанные гидравлическими магистралями 16, 19 и 24 с противоперегрузочной следящей системой. Двухпозиционный золотник 25 связан посредством планки 13 также с рычагом 12, а посредством гидравлических магистралей 26, 27 соединен с гидравлическим распределителем 21 привода лебедок. Полости силового гидроцилиндра 1 через обратные клапаны 28, 29 соединены с двухпозиционными золотниками 8 и 25. Работа устройства осуществляется следующим образом. Масло от насоса 20 поступает через гидравлические распределители 5 и 21 на грузовую лебедку (на чертеже не показана) или на гидроцилиндр 6 наклона стрелы в зависимости от того какой из гидравлических распределителей 5 или 21 включен. При подъеме груза массой, правышающей номинальнуж грузоподъемность при работе с убранным протит.озесом 2, гидро2цилиндр 6 наклона стрелы передает усилие от груза на ось 7. Ось 7 под действием этого усилия поворачивается вместе с жестко укрепленныгл на ней рычагом 12, который слшмает пружину плунжера 11, отрегулированную на усилие, обеспечивающее неподвижное положение рычага 12 при подъеме номинального груза. Одновременно с нажатием пружины плунжера 11 через планку 13, которая перемещает двухпозиционные золотники 8 и 25, масло перестает подаваться к грузовой лебедке и гидроцилиндру 6 наклона стрелы. По гидравлической магистрали 19 через двухпозиционный золотник 22 и клапан 29 масло подается в силовой гидроцилиндр 1. Шток этого гидроцилиндра поворачивает противовес 2, который своим кулачком 14 перемещает двухпозиционный золотник 9. Профиль к;улачка выполнен криволинейным, например эвольвентным. При полностью выдвинутом противовесе 2 двухпозиционный золотник 9 срабатывает. После перемещения двухпозиционного золотника 9 масло из гидравлической магистрали 24 поступает в гидравлическую магистраль 16 и по нему к подпружиненному плунжеру 11. Подпружиненный плунжер 11, перемещаясь, дополнительно сжимает пружину, которая возвращает рычаг 12 в исходное положение, двухпозиционные золотники 8 и 25 также под действием своих пружин возвращаются в исходное положение, и подача масла к грузовой лебедке или цилиндру 6 наклона стрелы восстанавливается. I При работе трубоукладчика с выдвинутым противовесом 2 и подъеме груза. массой, больше номинального, происходит тот же процесс поворота оси 7 с рычагом 12, сжатие пружины плунжера IIпри действии момента от груза и усилия от подпружиненного плунжера 11 и перемещение двухпозиционных золотников 8 и 25. Происходит прекращение подачи масла к грузовой лебедке и гидроцилиндру 6 наклона стрелы, а поскольку момент на оси 7 от действия груза больше, чем противодействующий ему от пружины плунжера 11, подача масла в гидроцилиндр 6 наклона стрелы на увеличение вылета и к грузовой лебедке на пссцъем груза не восстанавливается. В этом случае следует уменьишть вылет стрелы или опустить груз. При нажатии вручную на двухпозиционный золотник 23 противовес убирается. Форг/ ула изобретения Устройство для автоматического управления противовесом стреловых грузоподъемных машин, содержащее силовой гидроцилиндр, связанный кинематически
с противовесом и соединенный гидравлическими магистралями с гидросистемой, гидравлическим распределителем наклона стрелы, гидроцилиндром наклона стрелы, смонтированным на оси с возможностью поворота, и с противоперегрузочной следящей системой, отличающееся тем, что, с целью повышениянадежности и упрощения эксплуатации, противоперегруэочная следящая система содержит два двухпозиционных золотника и дополнительный гидроцилиндр с подпружиненным плунжером, причем гидроцилиндр наклон стрелы снабжен рычагом, смонтированным эксцентрично на его оси, один из двухпозиционных золотников снабжен
планкой, связанной с рычагом, а по- следний связан с подпружиненным плунжером дополнительного гидроцилиндра, при этом противовес снабжен кулачком, сопряженнЕлм с органом управления второго золотника, а последний соединен гидравлическими магистралями с гид зосистемой и дополнительным гидроцилиндром, причем золотник, снабженный планкой, связан гидравлическими магистралями с гидросистемой, гидроцилиндром наклона стрелы и с силовым гидроцилиндром противовеса.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 178073, кл. В 66 С 23/76, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления противовесом стреловых грузоподъемных машин | 1978 |
|
SU685615A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| Устройство для управления лебедками стрелового крана | 1984 |
|
SU1293098A1 |
| СТАЦИОНАРНОЕ ШЛАНГУЮЩЕЕ УСТРОЙСТВО ДЛЯ НАЛИВА ЖИДКОСТЕЙ | 1965 |
|
SU176811A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2078021C1 |
| Гидравлический фронтальный погрузчик | 1974 |
|
SU548559A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
Й/2.2
