(S) ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления захватом манипулятора | 1980 |
|
SU897497A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Грузоподъемное устройство | 1988 |
|
SU1648889A1 |
| Устройство для срезания деревьев | 1985 |
|
SU1277928A1 |
| Сучкорезно-раскряжевочная машина | 1987 |
|
SU1684055A1 |
| Лесозаготовительная машина | 1974 |
|
SU519167A1 |
| Привод рабочих органов лесозаготовительной машины | 1989 |
|
SU1652703A2 |
| Привод рабочих органов лесозаготовительной машины | 1980 |
|
SU970020A1 |
| ЗАХВАТНО-СРЕЗАЮЩЕЕ УСТРОЙСТВО ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2529159C1 |
I
Изобретение относится к лесозаготовительной технике и может быть ис-, пользовано в лесной промышленности.
Известна валочно-пакетирующая машина, выполненная с электроуправляемыми гидроприводами манипулятора, захватного устройства и срезающего органа .
Известна также лесосечная машина с автоматизированным управлением. Эта машина содержит манипулятор с приводом перемещения, захватное устройство и срезающий орган (шина с пильной цепью) с приводом вращения, подачи и возврата его в исходное по.ложение, гидромагистрали, электроуправляемые гидрораспределители, электрически подключенные к блоку управления 2.
Недостатком известных машин является использование в их составе ручного управления включения привода вращения, а также привода подачи и возврата в исходное положение
срезающег о органа. При этом фиксация 4oмёнтa окончания срезания дерева .определяется оператором, что в конечном счете сказывается на снижении производительности.
Цель изобретения повышение производительности путем сокращения продолжительности срезания деревьев.
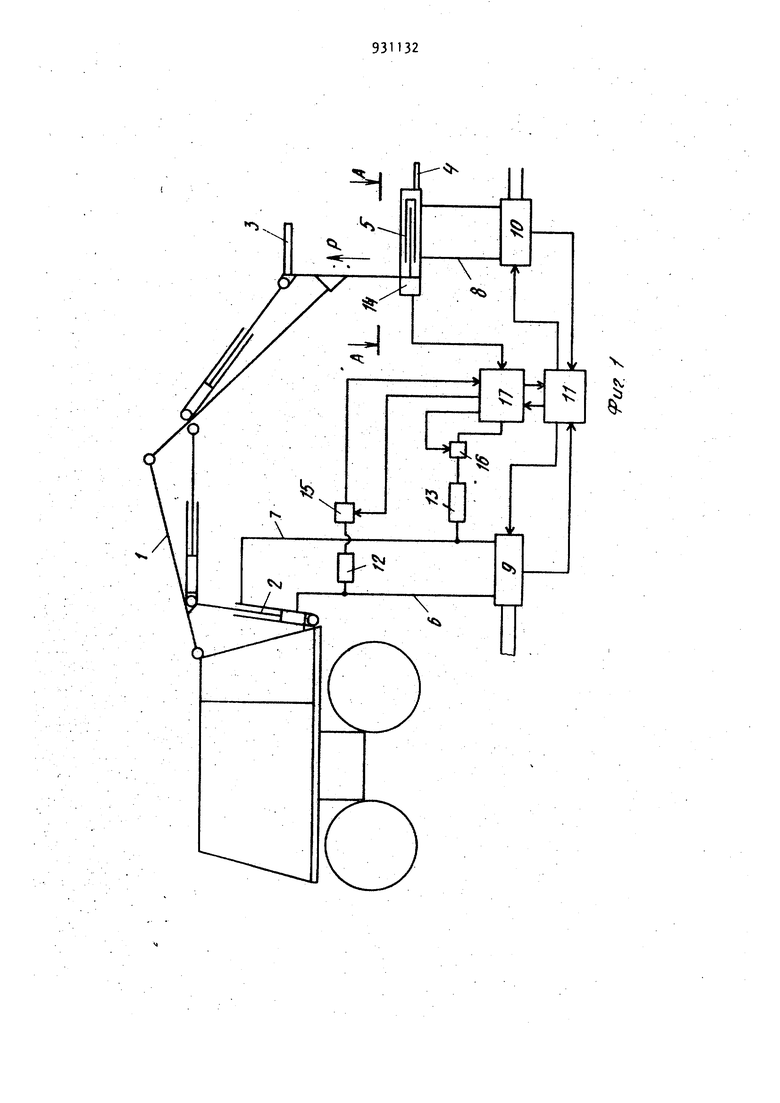
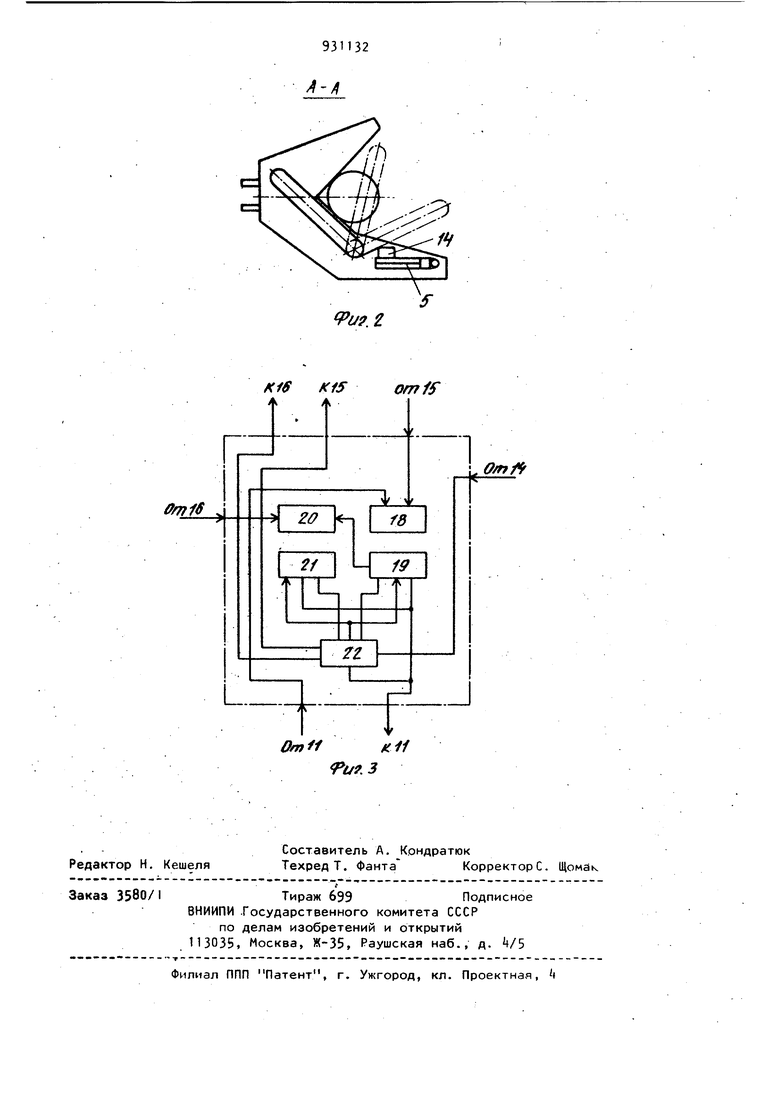
Поставленная цель .достигается тем, что машина снабжена логическим блоком, датчиком положения срезающего органа, датчиками гидродавления и пороговыми элементами, причем /датчики гидродавления установлены в гидр.омагистрали привода перемещения манипулятора и связаны с первым и вторым входами логического блока через пороговые элементы, входы установки нуля которых соединены с первым и вторым выходами логического блока, третий вход и выход которого соединен с блоком управления, а четвертый вход - с датчиком положения срезающего органа. Кроме того, логический блок включает первую и вторую схемы И, первый и второй элементы памяти и формирователь сигнала исходного положения. На фиг. 1 изображена лесозаготовительная машина, общий вид; на фиг,2 - разрез А-Л на фиг. 1; на фиг. 3 - функциональная схема логического блока. Лесозаготовительная машина содер жит манипулятор 1 с гидроприводом 2 его перемещения, захватное устройство 3, срезающий орган k (шина с I пильной цепью) с приводом 5 вращения его, подачи и возврата в исходное положение, гидромагистрали 6-8, элЬктроуправляемые гидрораспределители 9 и 10, блок 11 управления, да чики 12 и 13 гидродавления, датчик 14 положения срезающего органа 4, п роговые элементы 15 и 16 и логичес кий блок 17. Логический блок 17 содержит первую схему И 18, первый эл мент 19 памяти, вторую схеМу И 20, второй элемент 21 памяти и формиров тель 22 сигнала исходного положения Машина работает следующим образо После окончания технологических операций захвата срезаемого дерева с блока 11 управления формируется сигнал в электроуправляемый гидрораспределитель 9 который подключает гидромагистраль 6 к гидронасосу (не показан), и сигнал разрешения на логический .блок 17f Гидропривод 2 перемещения манипулятора создает через захватное устройство 3 посте пенно возрастающее усилие натяга, прилагаемое к растущему дереву. При достижении определенной вели чины давления в гидромагистрали 6 датчик 12 гидродавления опрокидывает пороговый элемент 15 который формирует сигнал в логический блок 17, ас его третьего выхода этот сигнал поступает в блок И управления, который возвращает золотник электроуправляемого гидрораспредели теля 9 в нейтральное положение. По цепи обратной связи сигнал о нелинейном положении зьлотника электроуправляемого гидрораспределителя 9 включает через блок 11 управления электроуправляемый гидрораспределитель 10, который задействует привод 5 срезающего органа k. При этом на чинается процесс срезания дерева. После срезания последних волокон (или их отрыва) предварительно натянутое манипулятором 1 дерево, освобождаясь от связей с пнем, подскакивает вверх. В гидромагистрали 7 происходит скачек давления, который воздействует на датчик 13 гидродавления, и при достижении требуемого значения его выходного сигнала срабатывает пороговый элемент 1б, который формирует сигнал через логический блок 17 и блок 11 управления в электроуправляемый гидрораспредеЛитель 10. Последний останавливает привод 5 вращения и подачи срезающего органа k с одновременным переключением его на возврат в исходное положение. При прохождении срезающим органом зоны срабатывания датчика 1 положения формируется сигнал, который через логический блок 17 и блок 11 управления приводит электроуправляемый гидрораспределитель 10 в нейтральное положение. При достижении нейтрали сигнал связи через указанные выше блок 11, блок Т7 и цепи установки исходного положения приводит элементы электронных и электромеханических устройств в исходное состояние. Работа логического блока 17 происходит следующим образом.(фиг.3). Сигнал от блока 11 управления подается на входы схем И 18, 20,при появлении сигнала от порогового элемента 15 схема И 18 по выходу производит запись в элемент 19 памяти. Выходной импульсный сигнал элемента 19 памяти Подается в блок 11, выходной потенциальный сигнал по второму выходу подается в схему И 20. При появлении, сигнала от порогового элемента 16 схема И 20 по выходу производит запись в элемент 21 памяти. Выходной импульсный сигнал элемента,21 памяти подается в блок 11. Формирователь 22 сигнала исходного положения подключен ко входам к третьему потенциальному выходу элемента 21 памяти и к выходу датчика Н положения. При появлении выходного сигнала датчика Т формирователь 22 формирует сигналы установки исходного положения элементов 19 и 21 памяти по первому выходу, сигнал установки исходного положения порогового элемента 15 по второму выходу, сигнал установки исходного положения порого59вого элемента 1б по третьему выходу и сигнал в блок 11 управления по четвертому выходу, соответствующий возврату электроуправляемого гидрораспределителя в нейтральное положение. Машина готова к повторному циклу срезания дерева. Таким образом, введение в машину логического блока, датчика положения срезающего органа, датчиков гидродавления и пороговых устройств с опи санными выше связями обеспечивает автоматический контроль окончания срезания дерева и возврат его в исходное положение. 8 результате этого достигается сокращение продолжительности рабочего цикла и улучшаются условия работы машиниста-оператора, что в конечном счете приведет к повышению производительности труда примерно на 2-3. Формула изобретения 1, Лесозаготовительная машина, содержащая манипулятор с гидроприводо перемещения,срезающий орган,его при:вод, имеющий электроуправляемые гид рораспределители, связанные с бло| ом управления, отличающая 26 с я тем, что, с целью повышения производительности путем сокращения продолжительности срезания деревьев, она снабжена логическим блоком, датчиком положения срезающего органа, датчиками гидродавления и пороговыми элементами, причем датчики гидродавления установлены с гидромагистрали .привода перемещения манипулятора и связаны с первым и вторым входами логического блока через пороговые элементы, входы установки ну/1я которых соединены с первым и вторым выходами логического блока, третий вход и выход которого соединен с блоком управления, а четвертый вход - с датчиком положения срезающего органа. 2. Машина по п. 1, о т л и ч а ющ а я с я тем, что логический блок включает первую и вторую схемы И, первый и второй элементы памяти и формирователь сигнала исходного положения. Источники информации, принятые во внимание при экспертизе 1.Отчет по НИР № , Воронежский лесотехнический институт, 1974, с. 19-20. 2.Авторское свидетельство СССР по заявке № 2687355, кл. А 01 G 23/08, 1978.
«
X
KiS к IS omff
Gmffnil
U9. 3
