Изобретение относится к измерительной технике и может быть использовано для автоматического определения угловой ориентации обьекта и измерения его угловых перемещений, а также для измерения профиля поверхности объекта бесконтактным методом в машиностроении и геодезии.
Целью изобретения является повышение информативности путем измерения также углового положения объекта.
На чертеже приведена принципиальная схема измерения.
На чертеже показаны источники света 1, 2, например, лазеры с оптическими фокусирующими системами 3, 4 и фотоприемная система 5, выполненная, например, в виде теодолита или гониометра со зрительной трубой.
Оптические оси источников ceeta параллельны друг другу и установлены они между собой и фотоприемной системой на заданном базовом расстоянии
На чертеже показан контролируемый объект 6.
На чертеже обозначены А и В - световые марки на контролируемом объекте; С - оптическая ось фотоприемной системы; R - расстояние от объекта до фотоприемной системы; L - базовое расстояние между источниками света;/ - угол между световыми лучами и начальным положением обьекта ;у - угол поворота объекта; Ј - смещение точки С относительно середины отрезка АВ; а и сщ - угловое положение фотоприемной системы на световые марки
Измерения осуществляют следующим образом.
Световой пучок от источников направляют на объект контроля через соответствующие оптические системы 3, 4, которые фокусируют их на объекте контроля, в виде световых марок. Последовательно наводят фотоприемную систему 5 на световые марки, измеряя при этом ее угловое положение.
ГО
Угловое положение объекта определяют по формуле
у Д« tg/S, где Да- изменение угла а - а + &2Уменьшение угла/ позволяет повысить чувствительность способа, но уменьшает диапазон измерений угла поворота объекта.
В случае значительных изменений расстояния R величина погрешности определяется из соотношения
()2ctg/3, где Д R - изменение расстояния.
При использовании способа в тех случаях, когда расстояние до объекта неизвестно или оно в процессе измерения изменяется в больших пределах, облучают поверхность
ТТ
объекта 6 под углом /3 -гг.
Смещение 6принимают равным нулю.
При этих геометрических соотношениях угловое положение вычисляется по формуле
у arctg
ctg «2 -ctgai
Расстояние до объекта может быть вычислено из выражения
R -- (ctg ai + ctg 02 ).
Формула изобретения
Триангуляционный способ измерения перемещений объекта, заключающийся в том, что проектируют световую марку от источника света на контролируемую поверхность под заданным углом, наводят на нее фотоприемную систему, расположенную на заданном базовом расстоянии от источника, измеряют ее угловое положение и по измеренному угловому положению вычисляют перемещение объекта, отличающийся тем, что, с целью расширения информативности путем измерения также углового положения объекта, проектируют на него вторую световую марку от другого
источника, расположенного параллельно первому, наводят на нее фотоприемную систему и измеряют при этом ее угловое поло- жение, угловое положение объекта вычисляют по результатам обоих измерений
углового положения фотоприемной системы.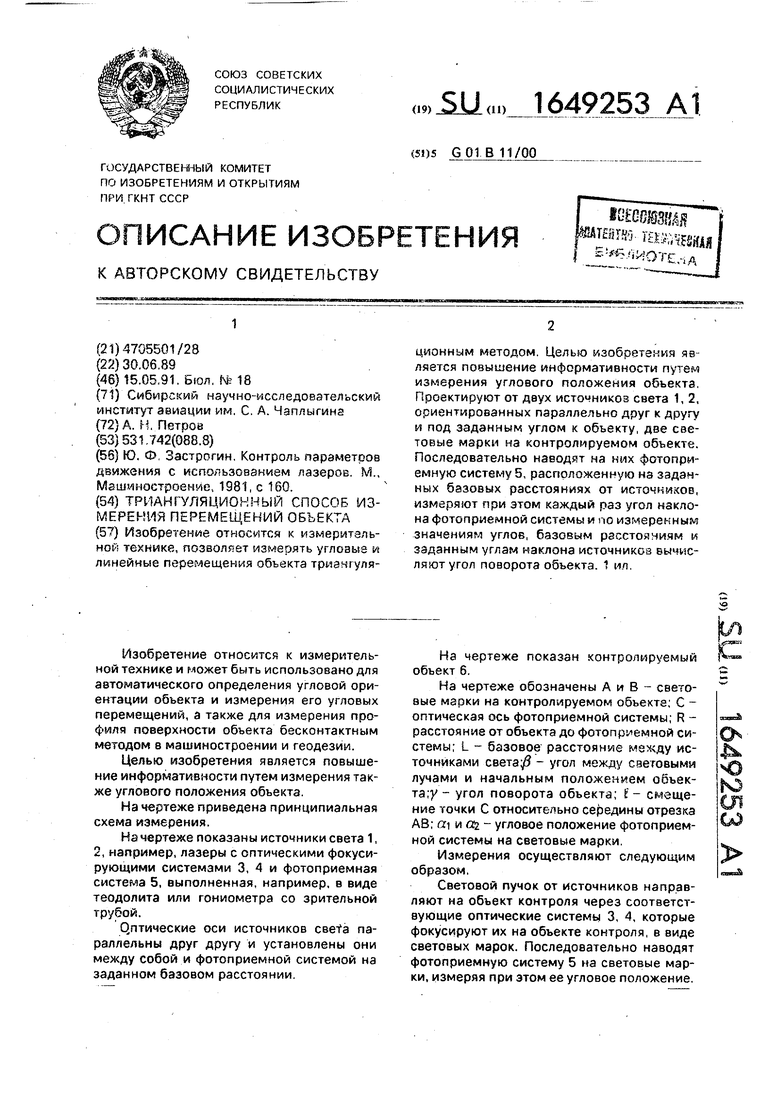

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения прямолинейности и плоскостности объекта | 1976 |
|
SU615359A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| Способ определения пространственных координат точек местности | 1985 |
|
SU1278580A1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2325618C2 |
| Способ бесконтактного измерения расстояний | 1988 |
|
SU1682766A1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ И ЛИНЕЙНЫХ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2366893C1 |
| Система для определения погрешности направления визирования телескопа | 1985 |
|
SU1335805A1 |
| Способ контроля формы поверхности объекта | 1989 |
|
SU1633256A1 |
Изобретение относится к измерительной технике, позволяет измерять углоаые и линейные перемещения объекта триангуляционным методом. Целью изобретения является повышение информативности путем измерения углового положения обьекта, Проектируют от двух источников света 1, 2, ориентированных параллельно друг к другу и под заданным углом к объекту, две световые марки на контролируемом объекте. Последовательно наводят на них фотоприемную систему 5, расположенную на заданных базовых расстояниях от источников, измеряют при этом каждый раз угол наклона фотоприемной системы и по измеренным значениям углов, базовым расстояниям к заданным углам наклона источников вычисляют угол поворота обьекта. 1 ип
| Ю | |||
| Ф Застрогин, Контроль парэметоов движения с использованием лазеров | |||
| М., Машиностроение, 1981, с 160. |
