Изобретение относится к машиностроению и может быть использовано дЪя контроля подшипников по времени выбега.
Цель изобретения - расширение фунциональных возможностей путем обеспечения контроля малогабаритных подшипников.
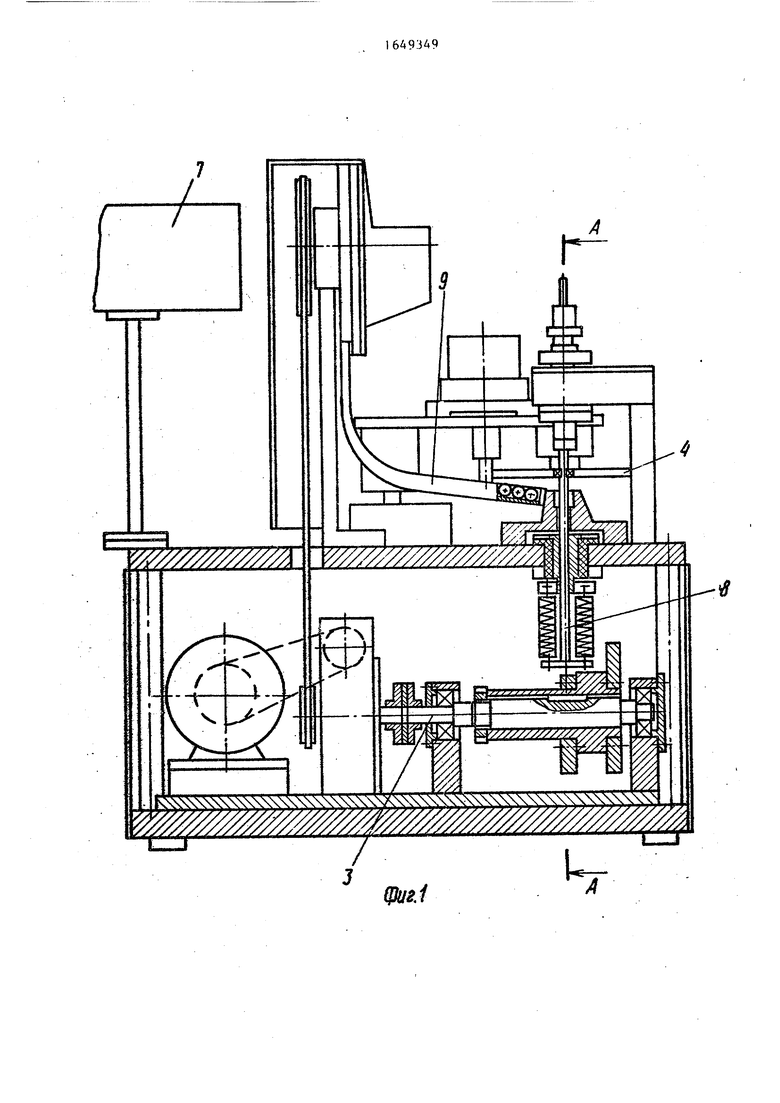
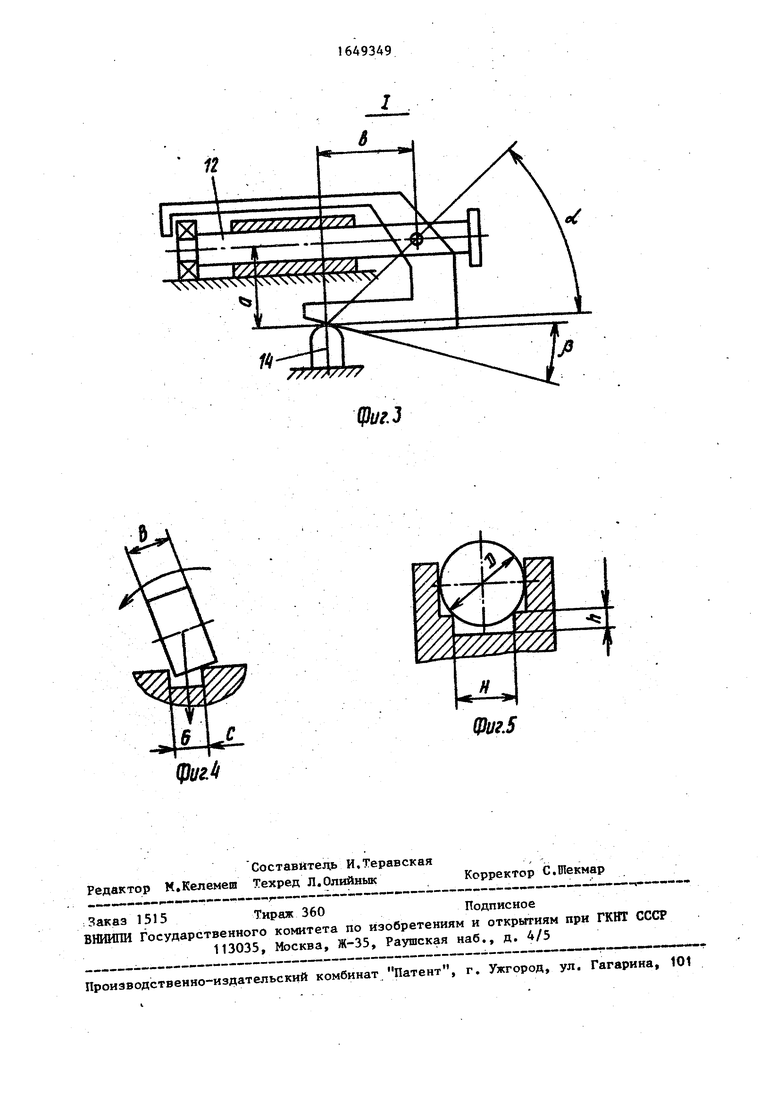
На фиг.1 показан автомат, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - узел I на фиг.2; на и 5 - соотношение между шириной приемного лотка и габаритными размерами подшипника.
Автомат содержит установленные на корпусе загрузочный 1 и приемный 2 бункеры, привод с кулачковым валом 3, механизм 4 вращения подшипников, измерительную станцию 5 с вибродатчиком 6, передающим электрический сигнал в электронный блок 7. Подаватель 8 кинематически соединен с кулачковым валом, подводящий лоток 9 связывает загрузочный бункер с приемным лотком 10 с канавкой, продолжением которого является отводящий лоток 11, Ползун 12 посредством рычага связан с кулачковым валом, а ограничитель 13 в виде двуплечего рычага, одно плечо которого выполнено Г-образно, шарнирно установлен на ползуне. Работоспособность огра- ничителя обеспечивается за счет клиновидной формы второго конца рычага, причем при определенном соотношении угла клина и расстояния от точки контакта его с упором до оси . толкателя и расстояния от точки контакта его с упором до оси бграничи- теля. В соответствии с фиг.1 устройство работает устойчиво при: аЈ0,5Ь;
р 5-10°.
Автомат работает следующим образом.
Измеряемые подшипники поштучно закатываются в приемный лоток 10. где они располагаются в пространстве между ползуном 12 и ограничителем 13. В таком положении подшипники
tfЈ28ff;
5
0
5
0
5
0
5
0
5
перемещаются по лотку к канавке, после чего ползун останавливается, а ограничитель поднимается над лотком, че препятствуя подшипникам устанавливаться на плоскость столика торцом. После ориентации подшипники перемещаются ползуном на подаватель 8, который центрирует их по внутреннему диаметру и перемещает до упора в вибродатчик 6 измерительной станции 5. В этом положении наружные кольца подшипников приводятся во щение фрикционным диском механизма 4 вращения, который после прекращения разгона отводится от подшипников.
Создаваемая подшипниками вибрация воспринимается вибродатчиком и в виде электрического сигнала передается в электронный блок 7, который оценивает подшипники по времени выбега и командует заслонкой приемного бункера 2,
Предложенная конструкция автомата позволяет производить контроль малогабаритных подшипников. Формула изобретения
Автомат для сортировки подшипников качения по времени выбега, содержащий корпус, загрузочный и приемный бункеры, привод с распределительным кулачковым валом, механизм вращения подшипников, кинематически связанный с кулачковым валом подаватель подшипников, а также измерительную станцию, отличающий- с я тем, что, с целью расширения функциональных возможностей путем обеспечения контроля малогабаритных подшипников, он снабжен подающим устройством в виде приемного лотка с поперечной канавкой и ползуна, шарнирно соединенного с ограничителем, последний выполнен в виде двуплечего рычага, одно плечо которого выпрлне но Г-образным, на корпусе выполнен упор, причем другое плечо рычага выполнено клиновидным и установлено с возможностью взаимодействия с упомянутым упором.
о- .
О4.
т о
п
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки подшипников качения по времени выбега | 1983 |
|
SU1105769A1 |
| Автомат для сортировки подшипников качения по времени выбега | 1984 |
|
SU1185152A1 |
| Автомат для сортировки подшипников качения | 1991 |
|
SU1809195A1 |
| Автомат для сортировки внутренних и наружных колец шариковых радиальных подшипников | 1958 |
|
SU120919A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ КОЛЕЦ ПОДШИПНИКОВ | 1991 |
|
RU2016673C1 |
| Автоматическая станочная линия | 1956 |
|
SU107719A1 |
| Автомат для контроля и сортировки деталей по размерам | 1972 |
|
SU471130A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ РАДИАЛЬНОЙ ТОЛЩИНЫ ВКЛАДЫШЕЙ ПОДШИПНИКОВ ДВИГАТЕЛЕЙ | 1970 |
|
SU267094A1 |
| Автомат для изготовления пружинных колец | 1973 |
|
SU518259A1 |
| Плоскопрокатный автомат | 1979 |
|
SU837523A1 |