Изобретение относится к машиностроению, а именно к шарнирно-рычажным механизмам для воспроизведения равноотстоящих кривых, и может быть использовано при создании устройств, воспроизводящих различные геометрические фигуры, например при изготовлении деталей соответствующего контура и т.п.
Цель изобретения - повышение точно- сти за счет снабжения механизма следящим приводом.
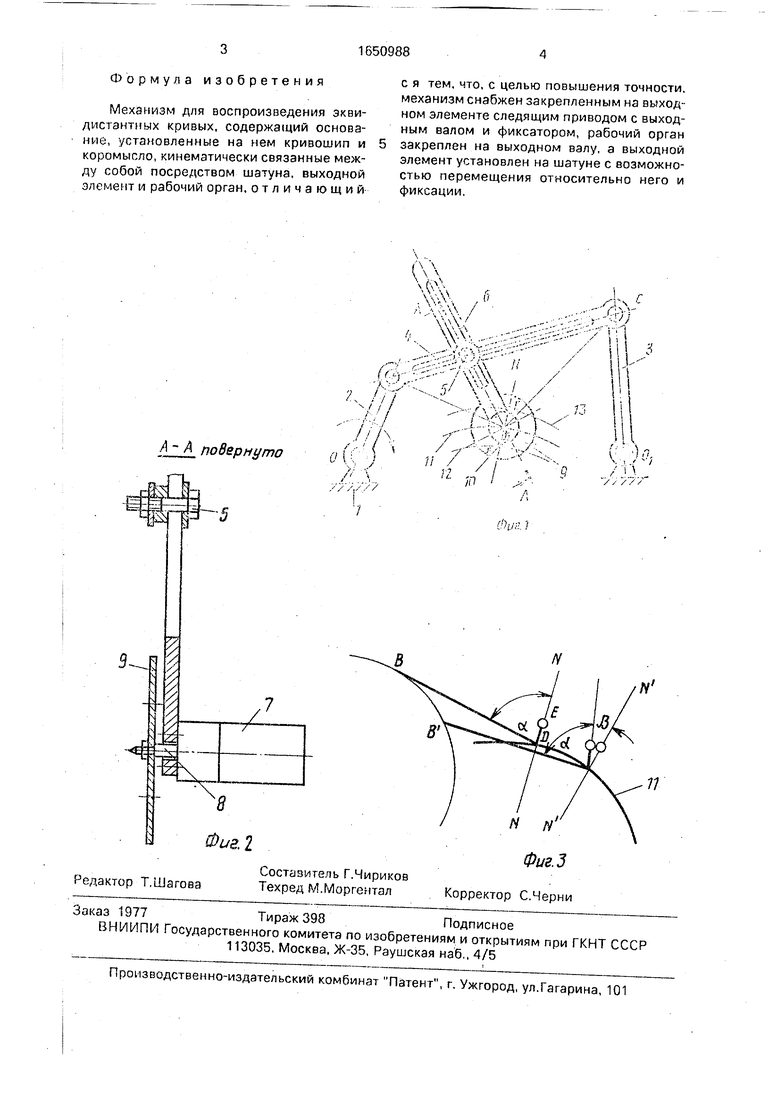
На фиг.1 показан механизм для воспроизведения эквидистантных кривых, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема перемещения элементов механизма.
Механизм для воспроизведения эквидистантных кривых содержит основание 1, установленные на нем кривошип 2 и коромысло 3, кинематически связанные между собой шатуном 4, закрепленный на нем с помощью фиксатора 5 выходной элемент 6, закрепленный на выходном элементе 6 следящий привод 7 с валом 8, на котором закреплен рабочий орган 9, выполненный, например, в виде диска с отверстиями 10 для установки в них грифеля, авторучки или другого какого-либо инструмента.
Механизм для воспроизведения эквидистантных кривых работает следующим образом.
Для обеспечения воспроизведения эквидистантных кривых относительно базовой заданной кривой 11 рассчитывают частоту вращения вала 8 следящего привода 7, которая обеспечивает доворот (например точки Е1) на угол, совмещения ее с точкой (нэп римерЕ).равноотстоящей от точки D на нормали (например N - N ) к базовой кривой 11 в каждый момент перемещения точки D по этой базовой кривой. При вращении кривошипа 2 точка D выходного элемента 6 движется по базовой кривой 11, при этом точки Е и F рабочего органа 9 за счет обеспечения его вращения с необходимой заданной частотой посредством следящего привода 7 описывают кривые 12 и 13, эквидистантные базовой кривой 11.
сл
с
о ел о о
00 00
Формула изобретения
Механизм для воспроизведения эквидистантных кривых, содержащий основание, установленные на нем кривошип и коромысло, кинематически связанные между собой посредством шатуна, выходной элемент и рабочий орган, отличающий
с я тем, что, с целью повышения точности, механизм снабжен закрепленным на выходном элементе следящим приводом с выходным валом и фиксатором, рабочий орган закреплен на выходном валу, а выходной элемент установлен на шатуне с возможностью перемещения относительно него и фиксации.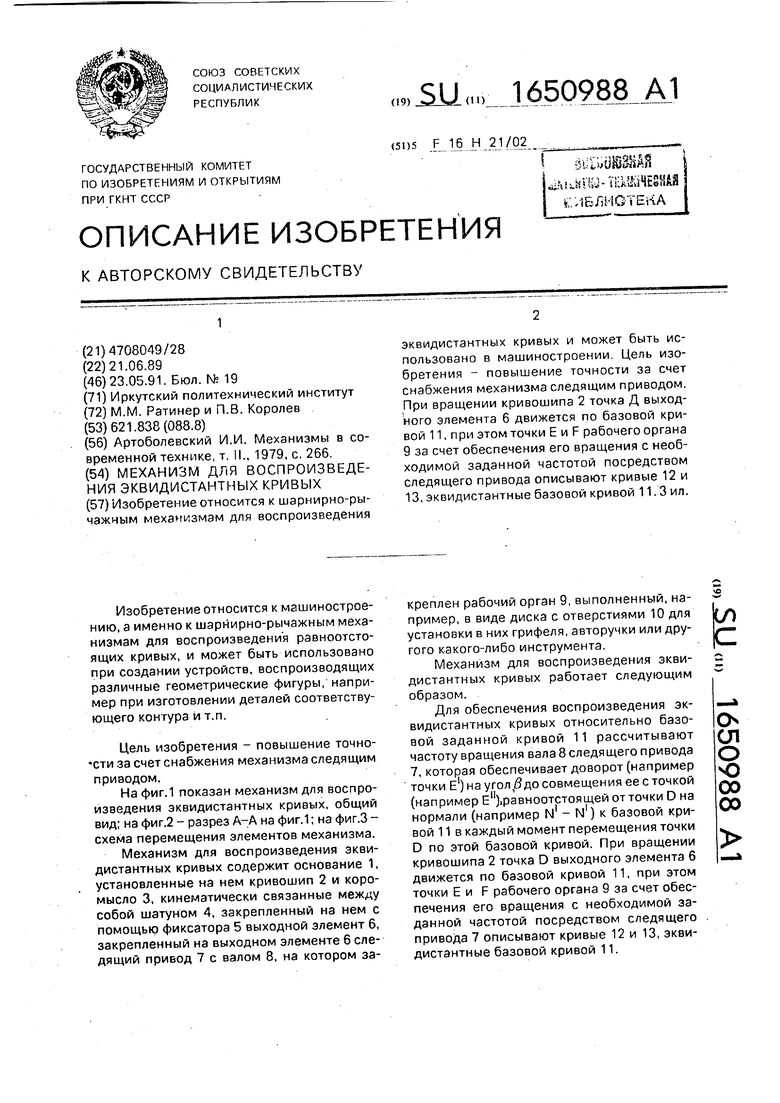
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127842C1 |
| Силовая передача ветродвигателя | 1985 |
|
SU1302010A1 |
| Сеялка для высева семян с одновременным внесением удобрений | 1980 |
|
SU912100A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 1998 |
|
RU2152486C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С ПЕРЕМЕННОЙ СТЕПЕНЬЮ СЖАТИЯ | 2001 |
|
RU2256085C2 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
Изобретение относится к шарнирно-ры- чажчым механизмам для воспроизведения эквидистантных кривых и может быть использовано в машиностроении. Цель изобретения - повышение точности за счет снабжения механизма следящим приводом. При вращении кривошипа 2 точка Д выходного элемента 6 движется по базовой кривой 11, при этом точки Е и F рабочего органа 9 за счет обеспечения его вращения с необходимой заданной частотой посредством следящего привода описывают кривые 12 и 13, эквидистантные базовой кривой 11.3 ил.
А А повернуто
///х,f
/ -у
. )// /
з
ч
..-- : -. / 1 - .. V - . --///
/ г.-:- ,. , i
ft,- - - I /, -. AV/x, iz 1|
- /-/
///х,f
/ -у ---;. ;;;/..
-. )// /
/
Ю
| Артоболевский И.И | |||
| Механизмы в современной технике, т | |||
| П. | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
