ми 5 и двух шарнирно соединенных с водилами Д сателлитов 6. К сателлитам 6 жестко прикреплены пальцы 7, шарнирно соединенные с Г-образными штоками 8, установленными в направ- ляняцих 2 корпуса 1 . Направляющие 2 расположены вдоль продольной оси редуктора. Штоки 8 связаны с шарнирно- зйклинивагацими захватами в виде пла- нок 9 и 10, При перемещении комбайна по стрелке У„ левое водило 4 вращется против часовой стрелки, а правое - по часовой стрелке, и левый шток 8 перемещается слева направо.
1
Изобретение относится к механизации выемки полезных ископаемых очистными комплексами и агрегатами и может быть использовано в бесцепных механизмах перемещения выемочных ма- шин,
Целью изобретения является повышение долговечности и надежности механизма перемещения в условиях пе- рекоса става конвейера с направля- ющей.
На фиг, 1 представлена схеме механизма перемещения выемочного комбайна, вид сбоку, для случая вращени водил в противоположные стороны; на фиг, 2 - то же, вид в плане; на фиг, 3 - сечение А-А на фиг. 1 -, на фиг, 4 - схема механизма редуктора при одинаковом направлении вращения водип (QH); на фиг. 5 - схема рас- положения сатехшитов и водил при сборке редуктора.
Механизм перемещения (подающий орган) выемочного комбайна содержит корпус 1 редуктора с двумя соосными направляющими 2 скольжения, два зубчатых коле са 3 внутреннего зацепления одинаковых размеров, жестко закрепленных в корпусе 1 редуктора, .два водила 4, жестко соединенные в центрах неподвижных колес внутреннего зацепления 3 с валами 5, связанными кинематически с приводом одинаковым передаточным отношением, которые гаарнирно соединены, в свою очередь, с корпусом 1 редуктора, два
518
Планки 9 и 10 левого захвата расклиниваются и свободно перемещаются по пазу 12 на величину хода штока 8, равную диаметру начальной окружности колеса 3. Правый шток 8 перемещается справа налево, и планки 9 и 10 останавливаются, а комбайн перемещается на величину диаметра начальной окружности колеса 3. Поскольку отсутствует относительное движение планок 9 и 10 и направляющей 13 и обеспечивается их надежное сцепление при перекосах, повьтается надежность механизма 5 ил.
5
шарнирио соединенные с водилами 4 сателлиты 6, К сателлитам 6 на начальных окружностях жестко присоединены пальцы 7, шарнирно соединенные с Г- образными штоками 8, подвижно соединенные одними плечами с направляющими 2 корпуса 1, а другими - с шарнирно заклинивающими захватами, выполненными в виде планок 9, шарнирно соединенными с планками 10 посредством параллельных промежуточных звеньев 11, Планки 9 и 10 взаимодействуют с продольным пазом 12 секционной направляющей 13, жестко закре- пленной на борту конвейера (не показан). Радиусы начальных окружностей сателлитов 6 выполнены в два раза меньшими радиусов начальных окружностей колес 3 внутреннего зацепления, а пальцы 7 жестко крепятся к сателлитам 6 на продольной оси редуктора симметрично поперечной оси редуктора. Причем сателлиты 6 располагаются симметрично поперечной оси редуктора при противоположном вращении водил и симметрично точке пересечения продольной и поперечной осей редуктора при одинаковом вращении водил. Кроме того, если при сборке/ планетарных передач обеспечить положение осей сателлитов 6 на продольной оси редуктора симметрично поперечной оси его, то направление вращения водил (сОц) безразлично.
Устройство работает следующим образом.
313
От приводного вала подающей части ашины (не показан) вращение с одинаовым передаточным отношением переается одновременно на валы 5 водил (например посредством одинаковых зубчатых колес z, по фиг. 2), При этом валы 5 и жестко связанные с нии водила 4, на осях О,- и 0 которых шарнирно закреплены сателлиты 6 (фиг. 2), перекатывают последние по колесам 3 внутреннего зацепления, естко закрепленным в корпусе 1 ре- . уктора. Вследствие того, что радисы начальных окружностей сателлитов 6 выполнены в два раза меньшими радиусов начальных окружностей зубчатых колес 3, пальцы 7, жестко присоединенные к сателлитам 6 на проольной оси корпуса 1 редуктора симетрично поперечной оси его, перемещаются вдоль продольной (горизонтальной) оси XX редуктора (фиг. 1), перемещая в противоположных направениях Г-образные штоки 8, щарнир- но соединенные с пальцами 7, по на- правлякяйим 2 корпуса 1 редуктора, который жестко крепится к Kopnyty комбайна или выполнен в его корпусе. При этом перемещаются планки 9 и 10 заклинивающих захватов, шарнирно присоединенные к плечам Г-образных штоков, и щарнирно соединенные посредством параллельных промежуточных звеньев I1, которые наклонены относительно поперечной оси корпуса 1 редуктора в одном направлении, вследствие чего одни планки 9 и 10 заклинивающих захватов заклиниваются в продольном пазу 12 секционной направляющей 13, останавливают Г-образ- ный шток 8, перемещая корпус комбайна, а другие планки 9 и 10 расклиниваются, свободно перемещаются по пазу 12 направляющей 13.
Для перемещения комбайна, например, в направлении слева направо по стрелке У„ (фиг. I) при вращении левого водила 4 против часовой стрелки, а правого водила 4 - по часовой стрелке, левый по фиг. 1 Г-образный шток 8 перемещается слева направо, при этом планки 9 и 10 левого захвата расклиниваются и свободно перемещаются по пазу 12 направляющей 13 на величину хода штока 8, равную диаметру начальной окружности зубчатого колеса внутреннего зацепления 3,а правый шток 8 при этом перемещается, справа налево, вследствие чего план05184
ки 9 и 10 правого захвата заклиниваются в пазу 12 секционной направляющей 13, жестко закрепленной на борту конвейера, шток 8 останавливается, с а комбайн перемещается в указанном направлении на величину диаметра начальной окружности колеса 3 внутреннего зацепления.
При переходе осей вращения саO теллитов 6 04 и 0 осевой линии Х . происходит смена направления п реме- щения штоков 8, вследствие чего правый шток 8 перемещается слева направо, расклинивает планки 9 и 10 пр а5 вого захвата, которые свободно перемещаются по пазу 12 направляющей 13, а левый шток 8 начинает перемещаться справа налево, заклинивает планки 9 и 10 левого захвата в пазу
0 12 секционной направляющей 13, - жестко закрепленной на борту конвейера, останавливается, вследствие чего комбайн перемещается опять слева направо в направлении стрелки V
5 (фиг. 1) на величину хода штока .8, указанную вьш1е. Далее цикл повторяется. Аналогичное перемещение .комбайна получаем при вращении валов 4 и водил 5 в одинаковом направлении
0 (. 4) при расположении сателлитов симметрично точке пересечения поперечной и продольной осей редуктора или в безразличном направлении фиг.5) при условии обеспечения расположения
. осей сателлитов при сборке на продольной оси редуктора.
В предлагаемой конструкции механизма перемещения выемочного комбайна отсутствует относительное движеQ ние планок 9 н 10 рычажных заклинивающих захватов и секционной направляющей 13 при заклинивании захватов в пазах 12 направляющей и перемещении комбайна, что исключает влияние
f геометрии элементов сцепления при перекосах направляющей как в горизонтальной, так и в вертикальной плоскостях, обеспечивается надежное сцепление планок захватов с направляющими в местах стыка их при перекосах, что приводит к повьппению надежности и долговечности механизма. Кроме того, предлагаемая конструкция не требует производства направляющих, которые могут быть изготовлены сваркой полос черного металла, что в значительной степени позволяет снизить затраты на производство тяговых органов бесцепной системы подачи.
51
Формула изобретения
Механизм перемещения выемочного комбайна, включающий подакядий орган, связанный с ним редуктор, соединен- ньгй с электроприводом, и секционную направлякнцую, неподвижно закрепленную на конвейере, отличаю- щ и и с я тем, что, с целью повышения долговечности и надежности механизма перемещения в условиях перекоса става конвейера с направляющей, подающий орган вьптолнен в виде двух взаимодействующих с секционной направляющей щарнирно заклинивающих захватов и двух неподвижно закреп105186
ленных на корпусе редуктора централь ных зубчатых колес внутреннего зацепления, имеищих одинаковые размеры, с кинематически соединенными с ними
5 двумя сателлитами, связанными с выходными валами редуктора посредством водил, валы которых расположены в центрах неподвижных колес, а шар- нирно 3аклиниванядие захваты соедиfO нены с сателлитами посредством Г-об- разных штоков, устадовленных в направляющих, которые вьшолнены вдоль продольной оси редуктора, проходящей через центры неподвижных колес
15 и пальцев, неподвижно прикрепленных к штокам.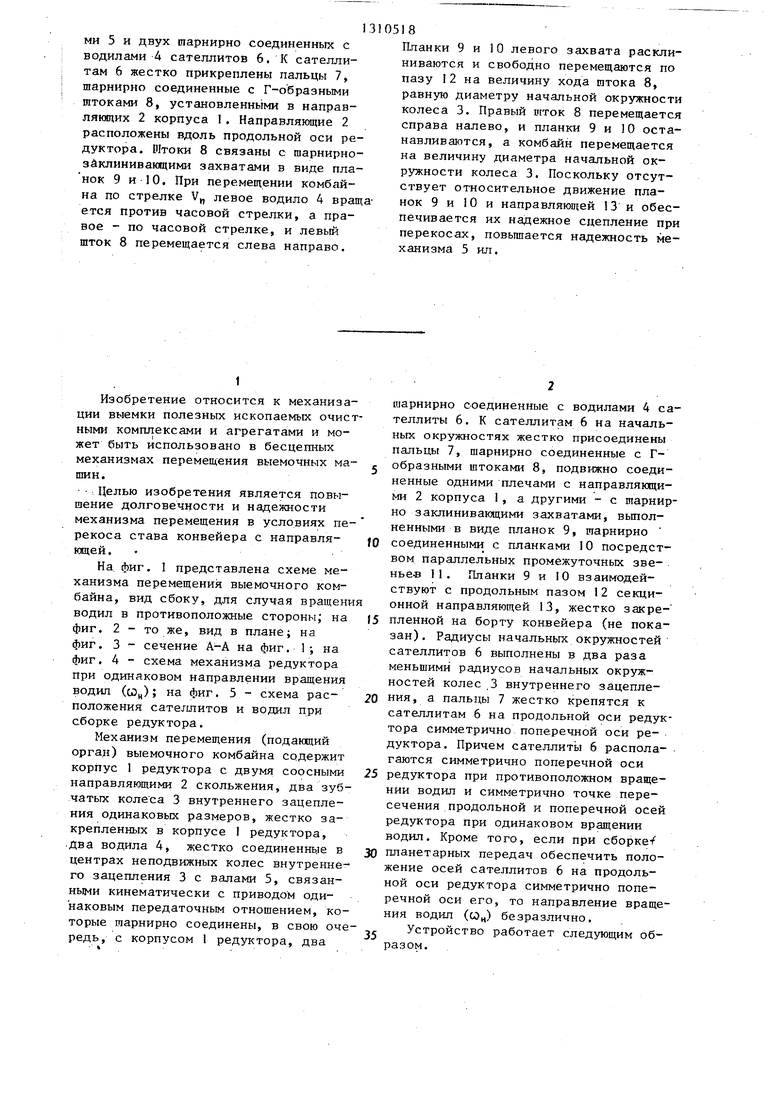

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1666699A1 |
| Механизм перемещения выемочного комбайна | 1986 |
|
SU1652541A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666703A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666702A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1411466A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1689609A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1425320A1 |
| УГЛЕДОБЫВАЮЩИЙ БАРАБАННЫЙ КОМБАЙН ДОЛИНСКОГО БКД, СПОСОБ ПОГРУЗКИ УГЛЯ НА КОНВЕЙЕР, БАРАБАННЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН ОЧИСТНОГО КОМБАЙНА, МЕХАНИЗМ ПОДЪЕМА ИСПОЛНИТЕЛЬНОГО ОРГАНА КОМБАЙНА, МЕХАНИЗМ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ КОМБАЙНА, МЕХАНИЗМ ПОДАЧИ КОМБАЙНА | 2001 |
|
RU2244124C2 |
| Механизм перемещения выемочного комбайна | 1985 |
|
SU1411463A1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1666692A1 |

Изобретение относится к области механизации выемки полезных ископаемых, повьшает долговечность и надежность механизма перемещения в условиях перекоса става конвейера с направляющей. Для этого подающий орган выполнен в виде двух взаимодействующих с секционной направляющей 13 шарнирно-заклинивающих захватов, двух неподвижно закрепленных на корпусе 1 редуктора центральных зубчатых колес 3 внутреннего зацепления с вала5 J 7 7 7 J 5 6 8 О 1СЛ .-л фиг.1
bLL I / тА
ЭО|Ы
T-T
v:7
7 f 3 UL I L
xP
П
СГЕ
л
0
E
в Л-JL
Физ.г
фиг8
Редактор Э.Слиган
Составитель А.Торопов Техред л.Олейник
Заказ 1874/30 Тираж 455Подписное
ВНИИПИ Государственного комитета СССР
по делам, изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. Л/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Пожо
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1980, т | |||
| IV, с | |||
| Гидравлическая или пневматическая передача | 0 |
|
SU208A1 |
| ЗАЖИМ ДЛЯ КАНАТНОЙ ТЯГИ | 1925 |
|
SU2374A1 |
| Лукиенко В.Г | |||
| и др | |||
| Испытание бесцветной системы подачи выемочной машины | |||
| Горные машины и автоматика | |||
| М.: ЦНИЭИуголь, № 7, 1972, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
