со 1 ел 4; Изобретение относится к области машиностроения для автоматизации технологических операций, требующих значительного числа точек позициони рования . Известен манипулятор, содержащий корпус и установленную на нем механическую руку с приводами горизонтального и вертикального перемещени в виде силовых цилиндров, механизм позиционирования и ограничитель хода механической руки в виде концевы выключателей С1Ц Недостатком такого манипулятора является сложность конструкции. Целью изобретения является упрощение конструкции манипулятора. Цель достигается тем, что в мани пуляторе , содержащем корпус и установленную на нем механическую руку с приводами горизонтального и верти кального перемещений в виде силовых цилиндров, механизм позиционирования и ограничитель хода механической руки в виде концевых выключателей , механизм позиционирования, выпол нен в виде зубчатой рейки с размеще ным на ней.ползуном, на котором шар нирно установлены подпружиненная собачка и фигурная скоба, контактирующая с концевыми выключателями, причем последние закреплены на зубчатой рейке. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. i; на фиг. 3 - механизм дискретного позиционирования} на фиг, 4 разрез Б-Б на фиг. 3; на фиг. 5 - cxe-i ,ма рабочего участка с манипулятором многоместной кассетой на шаговом транспортере и технологической позицией. Манипулятор с дискретным позиционированием содержит корпус 1, механическую руку 2, механизм 3 позиционирования и ограничитель 4 хода Механическая рука 2 содержит два силовых цилиндра 5 и б для ее горизонтсШьного и вертикального перемещений соответст.венно. Шток 7 цилиндра 5 неподвижно закреплен между двумя боковыми стенками 8 и 9 корпуса 1. Подвижным элементом цилиндра 5 яв ляется корпус 10, на котором закреплена каретка 11 с возможностью перемещения по штанге 12, расположенной параллельно штоку 7 и закрепленной между теми же стенками 8 и 9 корпуса 1. На каретке 11 установлен корпус 13 цилиндра 6. Подвижным элементом его является шток 14, на котором закреплен схват 15. На корпусе 10 цилиндра 5 размещены выступ 16 и упор 17 с демпфером 18. На корпусе 1 параллельно штоку 7 цилиндра 5 установлена зубчатая рейка 19 механизма 3. На Э1ой зубчатой рейке смонтирован ползун 20 (фиг, 3) с возможностью перемещения вдоль нее. На ползуне 20 установлена ось 21, на которой закреплены собачка 22 и фигурная скоба 23. Собачка 22 поджимается к рейке 19 пружиной 24, скоба 23 устанавливается относительно ползуна 20 в одном из двух крайних положений подпружиненным шариком 25, а сам ползун 20 фиксируется относительно рейки 19 подпружиненным шариком 26. при попадании erd в одно из гнезд на этой рейке. На последней в зависимости от размера обслуживаемой кассеты устанавливаются два концевых упора 27 и 28. Манипулятор с дискретным позиционированием предназначен для захвата изделия из многоместной кассеты 29 и переноса ее на технологическую позицию 30 или наоборот. Манипулятор работает следующим образом. В соответствии с кома.ндой программного устройства (на фигурах не показано) корпус 10 цилиндра 5 движется вправо, в сторону кассеты 29, вместе с закрепленной на нем кареткой 11 и цилиндром 6 с установленным на его штоке 14 охватом 15. Благодаря щтанге 12 схват 15 при перемещении всегда находится в строго ориентиррванном положении. При перемещении механической руки 2 вправо упор 17, смонтированнйй на корпусе 10 цилиндра 5, доходит до ползуна 20 механизма 3 и движется вместе|Сним до момента зацепления собачки 2 с зубом рейки 19, При этом подпружиненный шарик 26 западает в соответствующее гнездо рейки 19. Так как шаг зубьев этой рейки равен шагу расположения гнезд кассеты 29, то схват 15 располагается непосредственно над обрабатываемым гнездом этой кассеты. Затем по соответствующим командам с программного устройства последовательно обеспечиваются опускание схвата 15, захват изделия из гнезда кассеты 29, под1 ем схвата 15 с изделием в крайнее верхнее положение, переме 4ение механической руки 2 влево до ограничителя 4, расположение которого соответствует местоположению позиции 30. Затем происходят опускание схвата 15 с изделием, выгрузка его на позицию 30 и подъем пустого схвата в крайнее верхнее положение, после чего механическая рука 2 готова к повтррению цикла. Благодаря наличию демпфера 18 происходит плавная остановка этой руки в местах выполнения операций загрузки-выгрузки изделий. В начале движения механической руки 2 влево механизм 3 подготавливается к следующему ходу этой руки.
При этом выступ 16 входит в контакт с собачкой 22, нажимает на нее и выводит ее из зацепления с рейкой 1 При этом ползун 20 перемещается по рейке 19 на некоторое расстояние d влево (см. фиг, 3) и шарик 26 выходит на это же расстояние от центра гнезда на рейке 19. Повторное зацепление собачки 22 с прежним зубом этой рейки не происходит. Это обеспечивается тем, что в момент выхода собачки 22 из зацепления с зубом рейки 19, когда еще выступ 16 продолжает нажимать на эту собачку, ползун 20 перемещается под действием подпружиненного шарика 26 на величину о вправо. Поэтому зуб собачки 22 попадает на вершину следящего зуба рейки 19i после чего механизм 3 готов для обеспечения остановки механической руки 2 над очередным гнездом кассеты 29. При перемещении этой руки вправо цикл работы манипулятора повторяется.
В случае, когда механическая рука 2 приходит на обслуживание последнего гнезда одного ряда кассеты
29, верхняя чаеть скобы 23 входит в контакт с упором 27, под его действием вся эта скоба поворачивается на некоторый угол против часовой стрелки и верхняя ее часть становится ниже собачки.22. Подпружиненный шарик 25 обеспечивает скобе 23 устойчивое фиксированное положение. При перемещении механической руки 2 влево выступ 16 входит в. зацепление
с нижней частью скобы 23, обеспечивая транспортировку ползуна 20 по рейкэ 19 влево. Его перемещение про исходит до момента вхождения в контакт верхней части скобы 23 с упором 28. При этом скоба,23 поворачивается по часовой стрелке на некоторый угол, нижняя ее часть поднимается и выходит из зацепления с выступом 16. Механическая рука 2 продолжает перемещаться влево до ограничителя 4, а ползун 20 останавли. вается с помощью шарика 26 в крайнем левом положении против первого гнезда очередного ряда кассеты 29. После
этого-работа манипулятора rto загрузке-выгрузке такой кассеты повторяё ся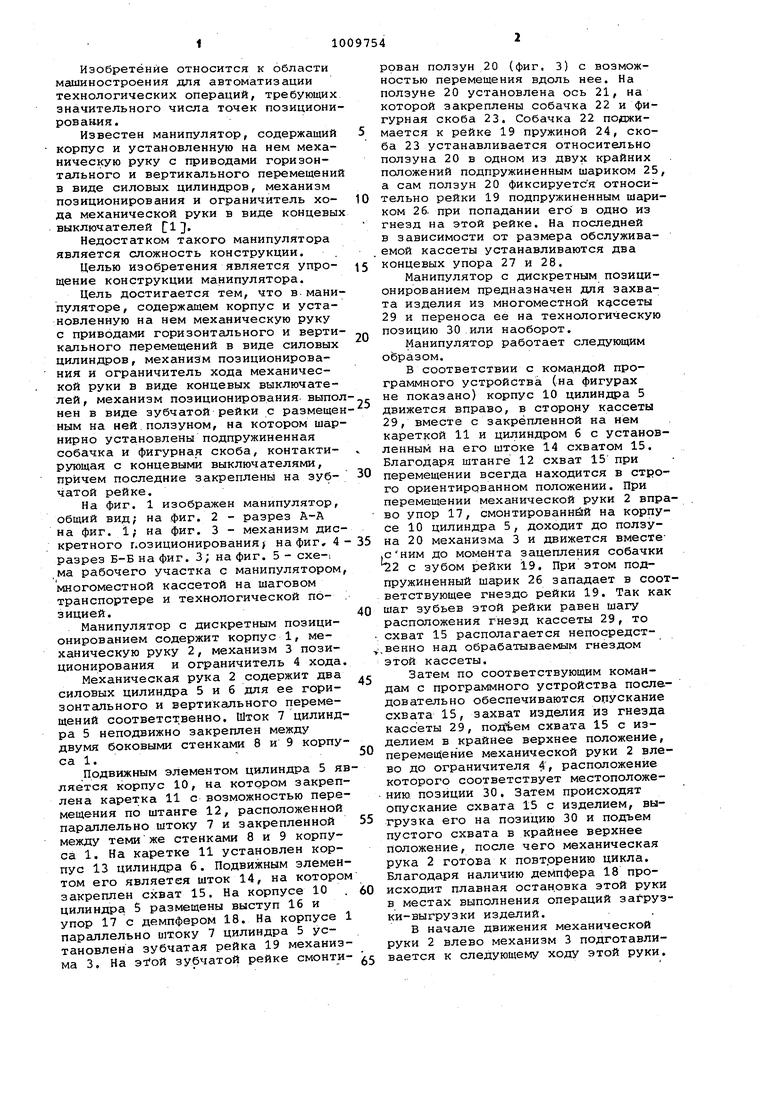

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1212779A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Манипулятор | 1988 |
|
SU1593948A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Устройство для контроля и сортировки сердечников | 1980 |
|
SU895552A1 |
| Устройство для ориентированной укладки штучных изделий | 1983 |
|
SU1135691A1 |

МАНИПУЛЯТОР, содержащий корпус и установленную на нем механическую руку с приводакш горизонтального и вертикального перемещений в виде силовых цилиндров, механизм позиционирования и ограничитель хода механической руки в виде концевых выключателей, отличающийс я тем, что, с целью упрощения конструкции, механизм позиционирования выполнен в виде зубчатой рейки с размещенным на ней ползуном, на котором шарнирно установлены подпру- жиненная собачка и фигурная скоба, контактирующая с концеолми выключателями, причем последние закреплены на зубчатой рейке.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1979 |
|
SU795938A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
