Изобретение относится к аналоговой вычислительной технике и предназначено для использования в навигационных системах.
Цель изобретения - повышение точности интегрирования.
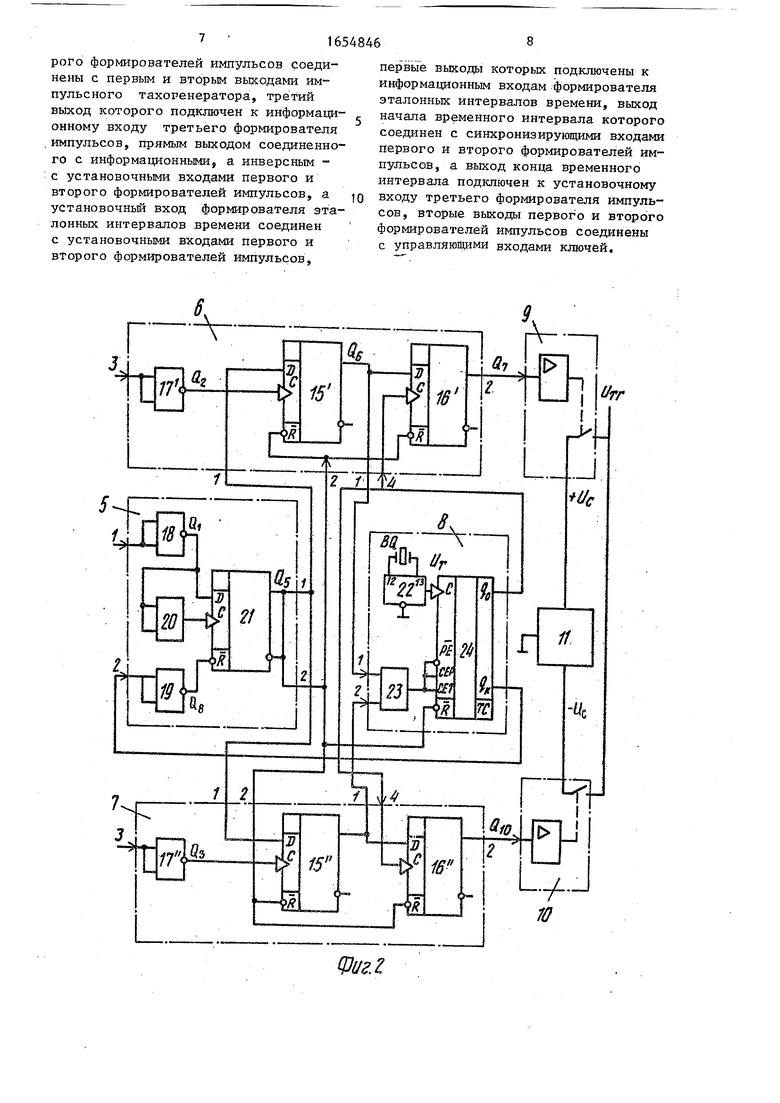
На фиг. 1 представлена функциональная схема электромеханического интегратора; на фиг. 2 - схемы формирователей; на фиг. 3 - циклограмма, поясняющая работу интегратора.
Электромеханический интегратор (фиг. 1) содержит интегрирующий усилитель 1, усилитель 2 мощности, исполнительный двигатель 3, импульсный тахогенератор (ИТГ) 4, формирователи 5-7 импульсов, формирователь 8 эталонных интервалов времени, ключи 9 и 10, источник 11 стабилизированного напряжения.
ИТГ 4 содержит конт актные щетки 12-14, являющиеся первым, третьим и вторым выходами импульсного тахоге- нератора.
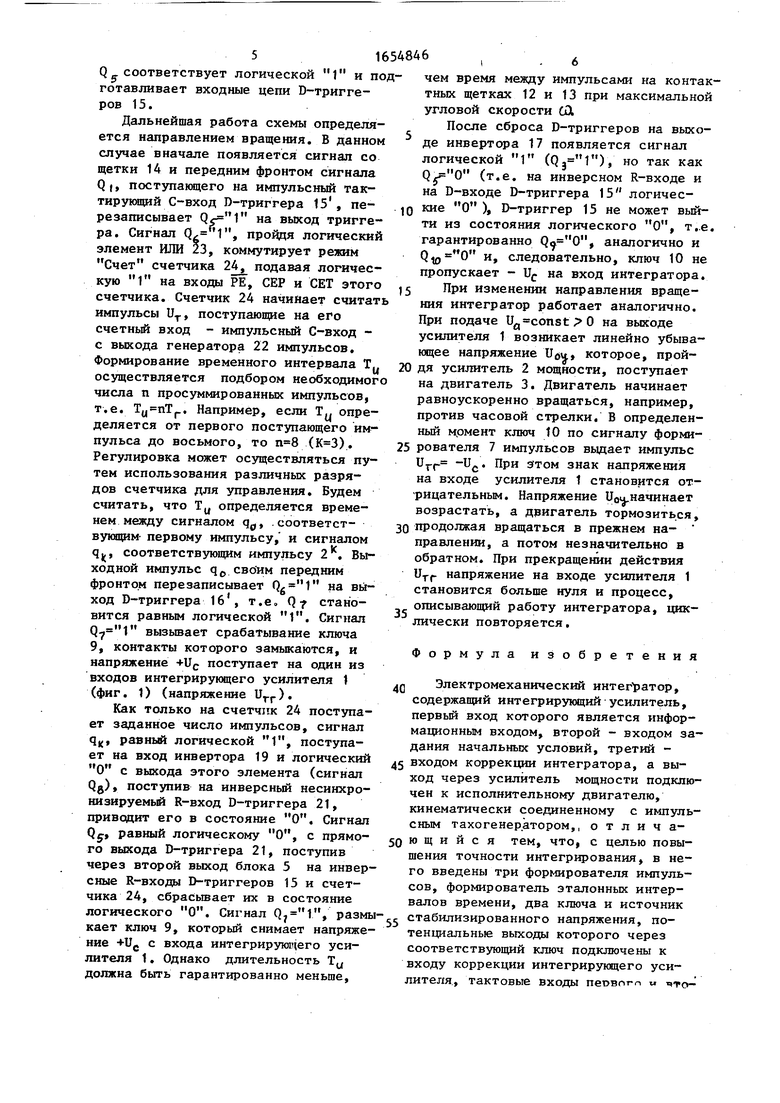
Первый 6 и второй 7 формирователи импульсов содержат (фиг. 2) два D- триггера 15 и 16 и инвертор 17, причем входы инверторов являются тактовыми входами формирователей, D- и R- входы триггера являются соответственно информационным и установочным входами формирователей, С-входы триггеров 16 являются синхронизирующими входами, а прямые выходы триггеров 15 и 16 соответственно первым и вторым выходами формирователей 6 и 70
Третий формирователь 5 импульсов содержит инверторы 18 и 19, элемент И 20 и D-триггер 21, прямой и инверсный выходы которого являются прямым и инверсным выходами формирователя 5, входы инверторов 18 и 19 являются соответственно информационным и установочным входами формирователя 5,
Формирователь 8 эталонных интервалов времени содержит стабилизированный генератор 22 импульсов, элемент ИЛИ 23 и счетчик 24 импульсов, выходы младших и старших разрядов которого
5
0
5
0
5
0
являются выходами соответственно начала и конца временных интервалов, а входы элемента ИЛИ 23 являются информационным входом формирователя 8.
На фиг. 3 обозначены выходные напряжения Q и q блоков с соответствующими индексами, UTf- корректирующий сигнал, Т - период следования корректирующих импульсов, зависящий от скорости 0) вращения двигателя 3, Тц - длительность корректирующих импульсов.
Интегратор работает следующим образом.
Предположим, что входные сигналы Ua и&Ия такие, что двигатель 3 и ИТГ 4 имеют угловую скорость вращения СО по часовой стрелке (фиг. 1). На ключи 9 и 10 подаются стабилизированные напряжения +U и -Uc от источника 11 и сигналы управления с формирователей 6 и 7. В зависимости от знака СО к входу коррекции интегрирующего усилителя 1 подключаются либо +ис, либо -Uc на время, определяемое длительностью импульсов с выхода формирователей 6 и 7.
Если в пределах времени Т C0 const, то коэффициент передачи ИТГ определяется формулой
К
Tulle
тг
Ж N
где N - число ламелей коммутатора
ИТГ„
При заданной СО и при нахождении контактных щеток 12-14 (фиг. 1) на проводящих участках выходные напряжения инверторов 17 и 18 (сигналы , Qg) имеют высокий уровень и соответствуют логической 1, Сиг- пал . (На выходе элемента И 20) повторяет сигнал Q} с задержкой, равной времени переключения элемента 20, и поступает на импульсный тактирующий С-вход D-трйггера 21, на D-входе которого уже присутствует сигнал 0, 1. Триггер 2Т переходит в единичное состояние, таким образом сигнал
516
Q соответствует логической 1 и поготавливает входные цепи D-тригге- ров 15.
Дальнейшая работа схемы определяется направлением вращения. В данном случае вначале появляется сигнал со щетки 14 и передним фронтом сигнала Qi, поступающего на импульсный тактирующий С-вход D-триггера 15, перезаписывает на выход триггера. Сигнал , пройдя логический элемент ИЛИ 23, коммутирует режим Счет счетчика 24, подавая логическую 1 на входы РЕ, СЕР и СЕТ этого счетчика. Счетчик 24 начинает считать импульсы UT, поступающие на его счетный вход - импульсный С-вход - с выхода генератора 22 импульсов. Формирование временного интервала Тц осуществляется подбором необходимого числа п просуммированных импульсов, т.е. . Например, если Т„ определяется от первого поступающего импульса до восьмого, то (). Регулировка может осуществляться путем использования различных разрядов счетчика для управления. Будем
считать, что TU определяется временем между сигналом q0, соответствующим- первому импульсу, и сигналом q, соответствующим импульсу 2К, Выходной импульс q0 сво им передним фронтом перезаписывает на выход D-триггера 161, т.е. Q становится равным логической 1. Сигнал вызывает срабатывание ключа 9, контакты которого замыкаются, и напряжение +UC поступает на один из входов интегрирующего усилителя 1 (фиг. 1) (напряжение Urr).
Как только на счетчик 24 поступает заданное число импульсов, сигнал qK, равный логической 1, поступает на вход инвертора 19 и логический О с выхода этого элемента (сигнал Qg), поступив на инверсный несинхронизируемый R-вход D-триггера 21, приводит его в состояние О. Сигнал Q, равный логическому О, с прямого выхода D-триггера 21, поступив через второй выход блока 5 на инверсные R-входы D-триггеров 15 и счетчика 24, сбрасывает их в состояние логического О. Сигнал , размыкает ключ 9, который снимает напряжение +IL с
,е v. входа интегрирующего усилителя 1. Однако длительность Т должна быть
гарантированно
и меньше,
0
5
чем время между импульсами на контактных щетках 12 и 13 при максимальной угловой скорости (Л
После сброса D-триггеров на выходе инвертора 17 появляется сигнал логической 1 (), но так как (т.е. на инверсном R-входе и на D-входе D-триггера 15 логические О ), D-триггер 15 не может выйти из состояния логического О, т.е. гарантированно , аналогично и О. и, следовательно, ключ 10 не пропускает - Uc на вход интегратора.
При изменении направления вращения интегратор работает аналогично. При подаче Ufl const 0 на выходе усилителя 1 возникает линейно убывающее напряжение U0u, которое, прой0 дя усилитель 2 мощности, поступает на двигатель 3. Двигатель начинает равноускоренно вращаться, например, против часовой стрелки. В определенный мрмент ключ tO по сигналу форми5 рователя 7 импульсов выдает импульс Urr -Uc. При этом знак напряжения на входе усилителя t становится отрицательным. Напряжение и0 начинает возрастать, а двигатель тормозиться,
0 продолжая вращаться в прежнем направлении, а потом незначительно в обратном. При прекращении действия итг напряжение на входе усилителя 1 становится больше нуля и процесс, описывающий работу интегратора, циклически повторяется.
Формула изобретения
Q Электромеханический интегратор, содержащий интегрирующий усилитель, первый вход которого является информационным входом, второй - входом задания начальных условий, третий 5 входом коррекции интегратора, а выход через усилитель мощности подключен к исполнительному двигателю, кинематически соединенному с импульсным тахогенератором,, о т л и ч ао ю щ и и с я тем, что, с целью повышения точности интегрирования, в него введены три формирователя импульсов, формирователь эталонных интервалов времени, два ключа и источник
стабилизированного напряжения, потенциальные выходы которого через соответствующий ключ подключены к входу коррекции интегрирующего усилителя, тактовые входы netmorn и что-
рого формирователей импульсов соединены с первым и вторым выходами импульсного тахоренератора, третий выход которого подключен к информационному входу третьего формирователя импульсов, прямым выходом соединенного с информационными, а инверсным - с установочными входами первого и второго формирователей импульсов, а установочный вход формирователя эталонных интервалов времени соединен с установочными входами первого и второго формирователей импульсов,
первые выходы которых подключены к информационным входам формирователя эталонных интервалов времени, выход начала временного интервала которого соединен с синхронизирующими входами первого и второго формирователей импульсов, а выход конца временного интервала подключен к установочному входу третьего формирователя импульсов, вторые выходы первого и второго формирователей импульсов соединены с управляющими входами ключей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСИЛИТЕЛЬ МОЩНОСТИ ДЛЯ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2103804C1 |
| Преобразователь тока в частоту | 1989 |
|
SU1695504A1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Аналого-цифровой преобразователь совмещенного интегрирования | 1989 |
|
SU1695503A1 |
| Измеритель временных интервалов | 1985 |
|
SU1307444A1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1552377A1 |
| Аналого-цифровой преобразователь | 1979 |
|
SU836794A1 |
| Дискретно-аналоговый интегратор | 1986 |
|
SU1372337A1 |
| Множительно-делительное устройство | 1977 |
|
SU696444A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
Изобретение относится к аналоговой вычислительной технике и предназначено для использования в навигационных системах. Цель изобретения - повышение точности интегрирования. Повышение точности связано с построением ИТГ с высокостабилизированным коэффициентом передачи. Для этого выходы 12-14 ИТГ 4 соединены с формирователями 5-7 импульсов, которые управтают подключением стабилизированного источника 11 питания на
Л-Фиг.1
i
... it.
ft
4s
Ift
1
tf
m
n.
ПП-
1
®/.j
| Электромеханический интегратор | 1976 |
|
SU604007A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
