Изобретение относится к радиотехнике, может быть использовано для фильтрации сигналов в системах измерения, управления, связи, обработки данных в радиолокации, вычислительной технике и является усовершенствованием основного изобретения поавтсв. N 1582334
Цель изобретения - повышение точности фильтрации путем уменьшения шумов квантования
На фиг 1 приведена электрическая структурная схема рекурсивного цифрового фильтра.
Рекурсивный цифровой фильтр содержит сумматор 1, первый и второй умножители 2 и 3, первый, второй, третий и четвертый регистры 4, 5, 6 и 7, первый и второй блоки памяти 8 и 9, первый, второй, третий и четвертый компараторы 10, 11, 12 и 13, первый и второй элементы И 14 и 15, первый и второй счетчики 16 и 17.
В рекурсивном цифровом фильтре по основному изобретению в петле обратной связи раздельно обрабатывают кодовую последовательность Y (п), являющуюся ближайшей в сторону уменьшения от выходной последовательности Y(n), удовлетворяющей условию
f|Y(n) b,-,(n) Ь, + 0,
$М br,r tf« Mb2tO,
гдеС
b,(
О)
abi и Ъг коэффициенты ветвей и петли обратной связи, и KOflqeyio последовательность ДУ(п) Y(n) - Y(n), причем в ветвях обработки кодовой последовательности Y(n) квантуют каждое произведение, а в ветвях обработки кодовой последовательности AY(n) - сумму, в ветвях обработки кодовой последовательности Y(n) анализируют состояние узлов разветвления и в случае достижения последними нулевого состояния квантование суммы посредством округления в ветвях обработки кодовой последовательности AY(n) заменяют квантованием путем усечения.
В предлагаемом устройстве в отличии от прототипа в ветви обработки кодовой последовательности Л Y(n) масштабируют
(/
С
о ел о о VJ
N5
ГО
входную и выходную кодовую последова-но учитывать. В данном случае компенсирутельности на величины А и 1/2, соответст-ющая величина оценивается как
венно, где Г 2N 1Ек nl ft Ј0( j) ° 5J (5)
гц ;nt . ч f2)гДе |o( выделенная составляющая
uY(n)m0xJ 5ошибки. Таким образом, при больших A Ek
а N - общее число разрядов, по окончаниивыполняет компенсацию с большой точномасштабирования выходной кодовой после-стью.
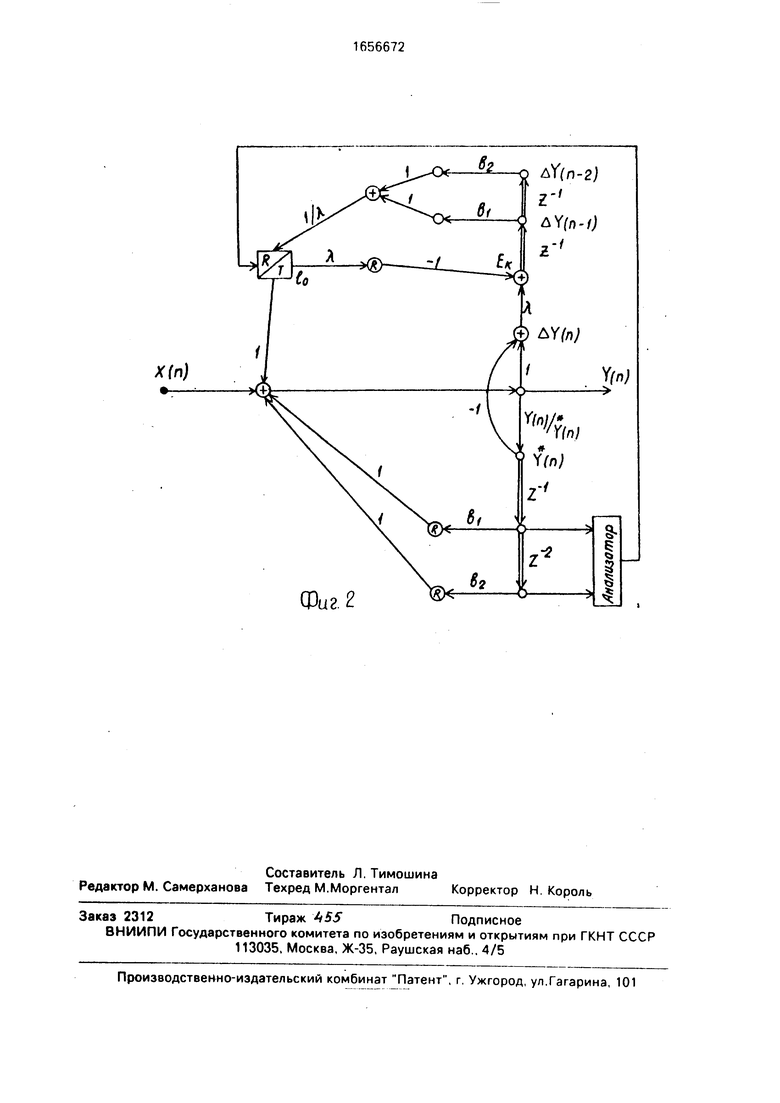
довательности в ветви обработки кодовойНа фиг.2 изображена топологическая
последовательности A Y(n) из нее выделяютсхема, иллюстрирующая принцип работы
составляющую ошибки, которую масштаби- 10рекурсивного цифрового фильтра,
руют на А , квантуют путем округления иОшибка округления на выходе фильтра
суммируют с входной масштабированнойоценивается как
кодовой последовательностью в ветви обра-(jul-2Re(ju)e(JQHft «0(i u)ботки кодовой последовательности AY(n),. ,г р ,- ,, л f S(ito) (л)
л f п v I Л со И ujl U. э-тг
Полный шум округления на выходе 15и поскольку L J ч
фильтра по основному изобретению оцени-... Гц).; /:Wt0 5) - L (jw) (7)
вается при помощи выраженияv ou i L °o4UJTU - -U
2 2 2 - i r iiiT-e разность между точным значением и
С -2Gj || В( jtOHI2 + Uo ll B(jCO) |(г 7(о)округленным равна ошибке округления, то,
/ 2а подставляя (7) в (6), получим
где ,ae -,1 1-М-ор норма от60(ш) ,
12. 3Ie(jG3)-2ee(ja))B j(o) СО (0
В(|й) . где ВО)- передаточная функция отили. переходя к шуму, получим
точки приложения шума до выхода фильтра, г
а q - единица младшего разряда. Из (3) 25Сг- о Ц&ПЦН - - / BljuMu (9)
видно, что даже при достаточно большомПринимая, что при I 5-10 AY(n)max
выбранном I шум округления на выходе будетнаходится в пределах 6-20, а N 16 в случае
значительным, поскольку он будет опреде-стандартного формата, второе слагаемое (9)
ляться вторым слагаемым (верхними ветвя-оказывается пренебрежимо мало, а общее
ми, которые не являются идеальными), что 30улучшение шума округления оценивается как
ограничивает уменьшение шума округ-7
ления по сравнению с обычным фильтромгб2,Ilbljulll + Gjlledullil 2 С;
не более, чем на половину.(« г.. .. ...г« (10)
Однако, в ветвях обработки AY(n), гене-г&||1в(|)Я| 2 утрирующих большой шум, уровень ДУ(п) ог- 35или раничивается некоторым AY(n)max, гдеft/p2
AY(n)max при l (5-10) в большинстве случаев„ -g и при Ј «(5-ю) /к
находится в пределах 6-20 единиц младше- б/с v/
го разряда, что создает возможность осуще-Рекурсивный цифровой фильтр работаствить такое преобразование, при котором 40ет в соответствии с разностным уравнением
ошибка округления уменьшится на величи-,
ну масштабирующего коэффициента А , ко-. Ы.у(п)1п1е9ег Ч(п-0 Ь,П/е
торый будет определяться как teger Y (п-г)Ь2 + i/f
, Г 2N -I . «tegerfuYln-Ob.tiYfn-zlb O.s j (12)
1П I uY(n 4 Рекурсивный цифровой фильтр работа01ет следующим образом.
где N - длина разрядной сетки. Для этогоВходная кодовая последовательность входную и выходную последовательностих(п) поступает на один из ВХОдов первого этих ветвей масштабируют на А и 1 /2 соот-сумматора 1, где суммируется со вторым и ветственно и создают компенсирующую 50 третьим слагаемым разностного уравнения петлю обратной связи по составляющей(12), поступающих с выходов умножителей ошибки округления, которую выделяют на2,3, и четвертым слагаемым с выхода второ- выходе ветвей обработки AY(n), также мае-го блока памяти 9. Результирующая кодовая штабируют и суммируют с уже масштабиро-последовательность Y(n) поступает на вы- ванным A Y(n). Следует отметить, что в 55 ход фильтра, и старшие разряды поступают других способах фильтрации подобное пре-на адресный вход первого блока памяти 8 и образование невозможно, поскольку ком-вход старших разрядов первого регистра 4, пенсирующая величина равна ошибкеа младшие разряды поступают на вход па- округления или Ek q/2, т.е. меньше единицыоаллельной записи первого счетчика 16. младшего разряда и следовательно ее невозможПервый блок памяти 8 формирует граничные значения зоны Y (п), которые подаются на первые входы первого и второго компараторов 10 и 11, одновременно на вторые их входы подается код с выхода пер- вого счетчика 16. Первый счетчик 1 б считает в сторону уменьшения до тех пор, пока на gro выходе не окажется в границах зоны Y (п), В этом случае первый и второй компаратор 10, 11 вырабатывают сигналы, кото- рые, объединяясь на первом элементе И 14, создают сигнал, который останавливает счет первого и второго счетчиков. После этого код с первого счетчика 16 вместе со старшими разрядами с выхода первого сумматора 1 записывается в первый регистр 4, образуя составляющую Y(n), причем перед этим код, код, находившийся в первом регистре 4, переписывается во второй регистр 5. Коды с выходов первого и второго регистров 4, 5 поступают на умножители 2, 3. где они умножаются на коэффициенты bi, 02 и квантуются, образуя новые вторые и третьи слагаемые разностного уравнения (12).
Второй счетчик 17 считает от нуля в сто- рону увеличения, формируя составляющую ЛУ(п). Для упрощения предлагаемого устройства коэффициент масштабирования Я выбирают какг -i Л m
(13)
и таким образом, операция масштабирования на Я и 1/2 эквивалентна сдвигу на m разрядов вправо и влево соответственно. В результате составляющая AY(n) сдвигается на m разрядов и подается на вход старших разрядов третьего регистра 6. На вход младших разрядов третьего регистра 6 записывается компенсирующая составляющая Etc, формируемая в петле компенсации, причем перед этим код. находившийся в регистре 6,
записывается в четвертый pemcrp 7 Mocns этого коды с выхода регистров 6, . поступают на адресные входы второго лока лямя iи 9, где умножаются коэффициенты (л и Ь квантуются и поступают на выходы агорою блока памяти 9. Младшие разряды от n m до п на выходе второго блока памяти 9 эквиваленты промасштэбированной и квантованной компенсирующей составляющей Et Составляющая Ek с выхода младших разрядов подается на входы младших разрядов третьего регистра задержки 6. Старшие разряды с выхода второго блока памяти 9 масштабируются на 1/А , округляются и формируют четвертое слагаемое разностного управления (12). Кроме того, коды с выхода второго и первого; регистра 4. 5 поступают на входы компараторов 12 и 13, и в случае их равенства нулю компараторы 12 13 вырабатывают сигналы, которые, объединяясь на втором элементе И 15. создают сигнал, который подается на вход второго блока памяти 9, переводя последний из режима округления в режим усечения.
Использование предлагаемого устрой ства по сравнению с устройством по основному изобретению позволяет уменьшить шум округления на величину, определяемую равенством (10, 11). Так, з большинстве случаях при I 5-10 возможно уменьшение шума в 4-12 раз, что обеспечивает более точную и следовательно более качественную фильтрацию.
Формула иэобре ения Рекурсивный цифровой фильтр по авт.св. № 1582334, отличающийся тем. что, с целью повышения точности фильтрации путем уменьшения шумов квантования, дополнительный выход второго блока памяти соединен с дополнительным входом третьего регистра.


| название | год | авторы | номер документа |
|---|---|---|---|
| Рекурсивный цифровой фильтр | 1987 |
|
SU1582334A1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2006936C1 |
| ЦИФРОВОЙ ЧАСТОТОМЕР | 1996 |
|
RU2097774C1 |
| Аналого-цифровой преобразователь | 1988 |
|
SU1658380A2 |
| УСТРОЙСТВО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1992 |
|
RU2042269C1 |
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Цифровой рекурсивный фильтр | 1988 |
|
SU1578720A1 |
| Многоканальное устройство приема сложных сигналов | 1989 |
|
SU1786664A1 |
| Цифровое измерительное устройство для обработки сигналов частотных датчиков | 1989 |
|
SU1659891A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИНТЕРВАЛА ВРЕМЕНИ | 2000 |
|
RU2173934C1 |
Изобретение относится к радиотехнике Цель изобретения - повышение точности фильтрации путем уменьшения шумов квантования Рекурсивный цифровой фильтрсодер- житсумматор 1,умножители 2 и 3, регистры 4, 5, 6 и 7, блоки 8 и 9 памяти, компараторы 10, 11, 12 и 13, элементы И 14 и 15 и счетчики 16 и 17. В данном фильтре в ветви обработки кодовой последовательности (КП) масштабируют входную и выходную КП на величины Я - где А - величина масштабирующего коэффициента, и 1 /2 соответственно. Поокончании мас- штабирования выходной КП в ветви обработки КП из нее выделяют составляющую ошибки, которую масштабируют на Я , квантуют путем округления и суммируют с входной масштабированной КЛ в ветви обработки КП. Уменьшение шумов квантования обеспечивается путем создания компенсирующей петли обратной связи по составляющей ошибки округления. 2 ил.
I
mil /М ,
12
13
уу
Х(п)
-
Фиг 2
| Устройство для вентиляции кабины транспортного средства | 1988 |
|
SU1532334A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
