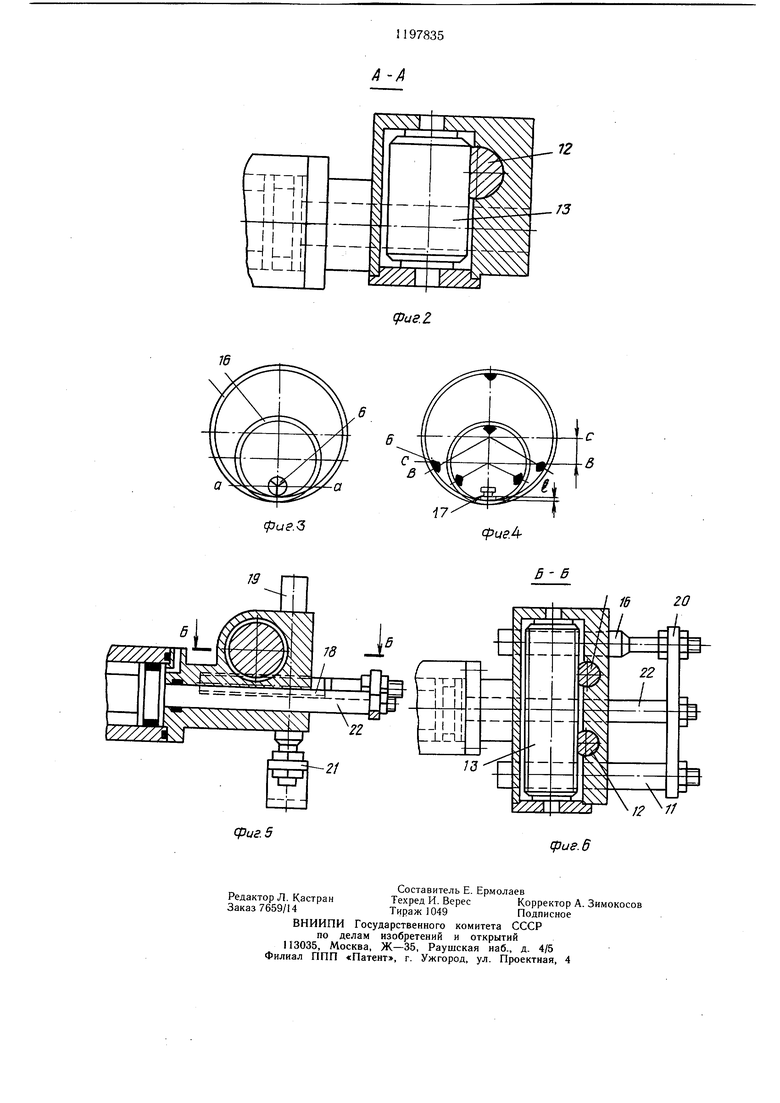
Изобретение относится к машиностроению, в частности к технологическому оборудованию, применяемому для автоматизации производственных процессов, например электроискрового клеймения обручальных колец. Цель изобретения - расширение функциональных и технологических возможностей захватного устройства путем совмещения измерения диаметразахватывающего губкэми кольца и корректировки положения оси захватного, устройства захватываемого объекта в зависимости от диаметра последнего. На фиг. 1 схематически изображено захватное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема расположения захватных губок внутри кольца перед его захватыванием на позиции; на фиг. 4 - схема расположения губок при захватывании колец минимального и максимального диаметров и положения колец относительно клейма на позиции клеймения; на фиг. 5 - захватное устройство с дополнительными рейками; на фиг. 6 - разрез Б-Б на фиг. 5. Захватное устройство содержит корпус, состоящий из корпусных деталей 1 и 2. В корпусной детали i размещен пневмоцилиндр с поршнем 3 и щтоком 4, на конце которого расположен профилированный конус 5. Зажимные губки 6 связаны с корпусной деталью 1 передаточными механизмами, например, в виде рычагов 7, в средней части которых установлены ролики 8, взаимодействующие с конусом 5. Рычаги 7 подпружинены пружинами 9 и закреплены на осях 10 в корпусной детали 1. В корпусной детали 2 размещен зубчатореечный механизм в виде взаимно перпендикулярных реек И и 12, взаимодействующих через шестерню 13. Рейка 11 связана с поршнем 3 (на фиг. 1 и 2 рейка 11 и порщень 3 выполнены заодно), а рейка 12 крепится к руке манипулятора, например, через поворотный элемент 14 сгиба 15. Устройство также содержит захватываемые устройством кольца 16 и клеймо-электрод 17. На фиг. 5 и 6 изображено захватное устройство с дополнительными рейками 18 и 19, жестко связанными соответственно с рейками 11 и 12 через траверсы 20 и 21, причем траверса 21 одновременно является кронштейном для крепления захватного устройства к руке робота. Траверса 20 с помощью тяги 22 связана с поршнем 3. Захватное устройство работает следующим образом. Поворотный элемент 14 сгиба 15 руки манипулятора перемещает захватное устройство в вертикальное положение, и на позиции выдачи детали захватные губки 6 вводятся внутрь кольца (фиг. 3). При подаче сжатого воздуха в соответствующую полость пневмоцилиндра поршень 3 со штоком 4 перемещаются, и профилированный конус 5 через ролики 8 разводит подпружиненные рычаги 7 до упора захватных губок 6 на внутреннюю поверхность кольца 16 (фиг. 4). Перемещение губок 6 в направлении, перпендикулярном оси захватного устройства, осуществляется пропорционально ходу поршня 3 за счет соответствующего профилирования конуса 5. Одновременно с поршнем 3 перемещается рейка 11, вращая шестерню 13, которая накатывается на рейку 12, перемещая корпус захватного устройства от основания рейки пропорционально ходу порщня 3. При этом перемещение корпуса захватного устройства равно перемещению одной из зажимных губок в направлении, перпендикулярном оси захватного устройства. Ось захватного устройства при захватывании кольца с внутренним диаметром dmin перемещается из исходного положения а-а в положение b-b, при захватывании кольца с внутренним диаметром дтах - в положение с-с. В зависимости от внутреннего диаметра dn схватываемого кольца величина К корректировки оси захватного устройства должна соответствовать d;i-di л 2 гдed|-диаметр кольца, например, минимальный из ряда, относительно которого был первоначально выставлен рабочий зазор f между клеймом 17 и поверхностью клеймения кольца (фиг. 4). Максимальная величина корректировки К тах Omin где dmax И dmm - максимальный И минималь. ный внутренние диаметры ряда схватываемых колец. Таким образом, при схвате колец с внутренним диаметром дтт-dmax захватное устройство автоматически корректирует положение оси устройства и, соответственно, кольца так, чтобы на позиции клеймения рабочий зазор I между клеймом 17 и поверхностью клеймения был постоянным независимо от диаметра схватываемого кольца (фиг. 4). Захватное устройство (фиг. 5 и 6) имеет дополнительные взаимно перпендикулярные рейки 18 и 19, каждая из которых установлена параллельно соответствующей основной и имеет возможность регулировки вдоль основной рейки, чем выбирается люфт в зубчато-реечном механизме и, соответственно, повышается точность корректировки положения оси захватного устройства. -/i
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захват | 1980 |
|
SU905061A1 |
| Устройство для маркировки прокатных профилей | 1974 |
|
SU492332A1 |
| Устройство для обработки поршневых колец | 1982 |
|
SU1013223A1 |
| УСТРОЙСТВО для КЛЕЙМЕНИЯ TOJJCTOCTEHHblX ТРУБ | 1970 |
|
SU275976A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Устройство для клеймения металлических изделий с криволинейной поверхностью | 1990 |
|
SU1779429A1 |
1. ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус, в котором шарнирно установлены зажимные рычаги с губками, и привод, выполненный в виде силового цилиндра, шток которого кинематически связан с зажимными рычагами, отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено промежуточным элементом для связи корпуса захватного устройства с рукой, выполненным в виде направляющей с жестко связанной с ней зубчатой рейкой, а корпус установлен на этой направляющей с возможностью его перемещения в направлении, перпендикулярном оси силового цилиндра привода, и снабжен установленным на оси зубчатым колесом, входящим в зацепление с зубчатой рейкой промежуточного элемента, причем зажимные рычаги снабжены роликами, установленными между губками и осями рычагов, а поршень силового цилиндра выполнен с двусторонним штоком, жестко связанным с одной стороны с профилированным кулачком, рабочие поверхности которого расположены с возможностью контактирования с роликами зажимных рычаговга с другой стороны - со второй зубчатой рейкой, входяшей в зацепление с зубчатым колесом. 2. Устройство по п. 1, отличающееся тем, i что каждая зубчатая рейка снабжена жестко связанной с ней траверсой и дополнительной (Л рейкой, входящей в зацепление с зубчатым колесом и установленной на траверсе с возможностью регулировки ее положения в направлении перемещения. со оо со сд
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
